Изобретение относится к электротехнике, а именно к системам автоматизированного управления электроприводом постоянного тока и может быть использовано на транспорте для автоматизированного управления тяговым электроприводом.
Известен электропривод, содержащий электродвигатель, датчики токов якоря и возбуждения, частоты вращения электродвигателя, два усилителя мощности, блок задания ij .
Наиболее близким по технической сущности к предлагаемому является электропривод содержащий электродвигатель, датчики тока и напряжения якоря, частоты вращения и тока возбуждения электродвигателя, первый усилитель мощности, выход которого соединен с обмоткой возбуждения электродвигателя, блок заданий Н . .
Известные устройства обеспечивают высокую эффективность стабилизации частоты вращения электродвигателя, однако в режимах пуска, реверса и отбора постоянной мощности эффективность системы снижается в значительной степени.
Цель изобретения - повышение эффективности работы электропривода. Поставленная цель достигается тем, что в электропривод дополните льно вве.гГены блоки разгона, согласования режимов, стабилизации частоты вращения, стабилизации мощности, лотки и два коммутатора, при этом выходы всех датчиков соединены
10 с одним из входов блока логики и через один из коммутаторов с входами блоков разгона, согласования режимов, стабилизации частоты вращения и стабилизации мощности, выходы ко-
15 тбрых через другой коммутатор подключены к входам первого и второго усилителей мощности, выход блока логики соединен с управляющими входами коммутаторов, а второй вход
20 блока логики подключен к выходу блока заданий.
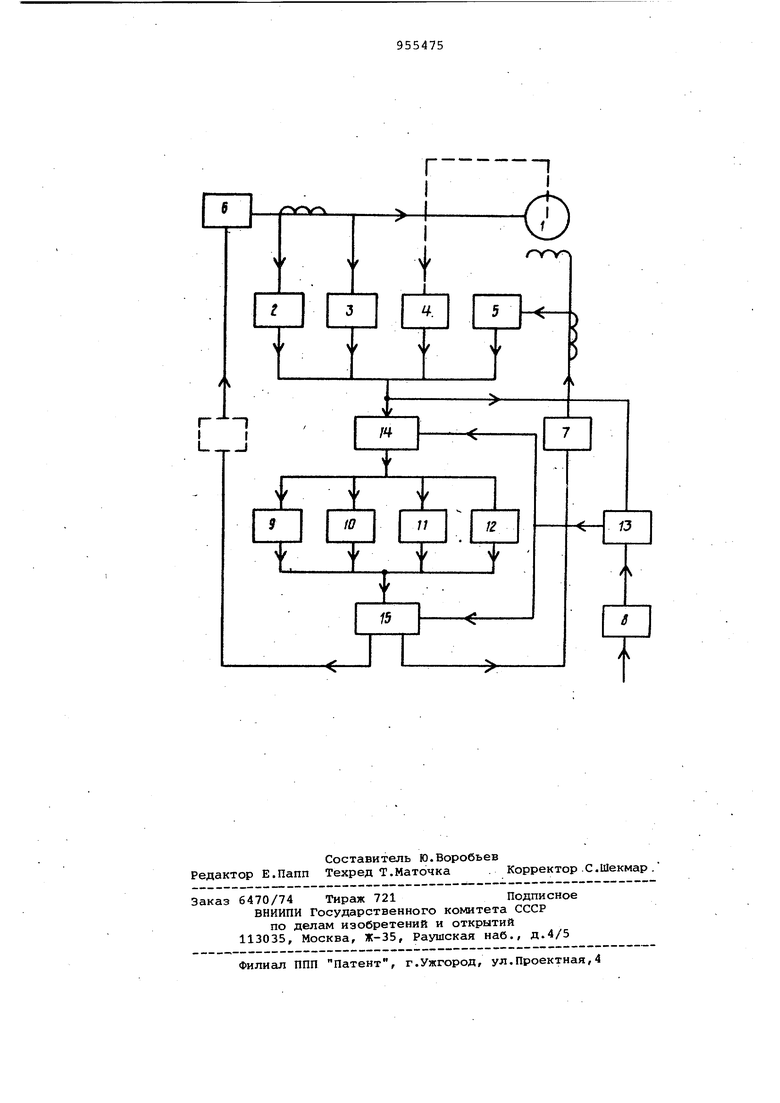
На чертеже приведена функционёшьная сх-ема электропривода.
Электропривод содержит электро25двигатель Ij датчики 2-5 тока и напряжения якоря, частоты вращения и тока возбуждения электродвигателя, первый усилитель б мощности, выход которого соединен с якорем электро30 двигателя 1, второй усилитель 7 мощности, выход которого соединен с обмоткой возбуждения электродвигателя 1, блоки 8-13 заданий, разгона, согласования режимов, стабилизации частоты вращения, стабилизации мощности, логики и коммутаторы 14 и 15. Выходы датчиков. 2-5 соединены с одним из входов блока 13 логики, и через коммутатор 14 с входами блоков 9-12, выходы которых, через коммутатор 15 подключены к входам первого и второго усилителей 5 и 7, выход блока 13 соединен с управляющими входаiMH коммутаторов 14 и 15, а второй вход блока 13 подключен к блоку 8 зад-.ний. .
Выход коммутатора 15 подключен к усилителю 6 мощнЬсти через блок управления.
Электропривод работает следукяцим образом.
С блока 8 заданий на блок 13 лоГТ1КИ подается уставка частоты вращения. Блок13 на основании показаний датчиков 2-5 вычисляет мощность, раз виваемую электродвигателем и сравнивает ее с допустимой. Если мощност электродвигателя меньше допустимой, то блок 13 сравнивает частоту apaimeния электродв игателя с уставкой. В том случае, когда модуль этой разности больше заданного значения, блок 13 через коммутаторы .14 и 15 подкорочает блок 9 разгона к датчикам 2-5 и к первому и второму усилителям б и 7,т.е. замыкает систему управления через блок 9 разгона. При этом осуществляется разгой или реверс электродвигателя до заданной уставки за минимальное время при обеспечении ограничений на управление и координаты состояний привода. Блок
13отключает блок 9 разгона в двух случаях: либо когда мощность, развиваемая электродвигателем, становится равной допустимой, либо когда частота вращения отличается от уставки меньше, чем на заданную величину. Во втором случае блок 13 вместо блока 9 при помощи коммутаторов
14и 15 подключает блок 10 согласования режимов. При замыкании системы управлен.ия через блок 10. осуществляется перераспределение- управляювщх воздействий на входах первого и второго усилителей 6 и 7 при постоянной частоте вращения электродвигателя, равной или мало отличеиощейся от уставки.
Если в процессе работы любого из перечисленных блоков мощность, вычисляемая в блоке 13, окажется равной допустимой, то блок 13 отключает любой из блоков 9-11 и подключает блок 12 стабилизации мощности. Этот блок отключается в том случае, когда частота вращения электродвигателя 1 отличается от уставки на малую заданную величину. При этом подключается блок 11 с-табилизации частоты вращения.
Таким образом, предлагаемый электропривод имеет высокую эффективность для каждого из режимов работы электропривода, а также повышенную надежность, так как любой из блоков разгона, согласования режимов, стабилизации частоты вращения, стабилизации мощности может выполнять функции простейшего неоптимального регулятора.
Формула изобретения
Электропривод, содержащий электродвигатель, датчики тока и напряжения якоря, частоты вращения и тока -возбуждения электродвигателя, первый усилитель мощности, выход которого соединен с якорем электродвигателя, второй усилитель мощности, выход которого соединен с обмоткой возбуждения электродвигателя, блок заданий, отличающийся тем, что, С цепью повышения эффективности работы, в него дополнительно введены блоки разгона, согласования режимов, стабилизации частоты вращения, стабилизации мощности, логики и два коммутатора, при этом всех датчиков соединены с одним из входов блока логики и через ;один из коммутаторов с входами блоков разгона, согласования режимов, стабилизации частоты вращения и стабилизации мощности, выходы которых через другой коммутатор подключены к входам первого и второго усилителей мощности, выход блока логики соединен с управляющими входами коммутаторов, а второй вход блока логики подключен к выходу блока заданий.
Источники информации, принятые во внимание при экспертизе
1.Авторское Свидетельство СССР 666622, кл. Н 02 Р 5/06, 1979.
2.Schiff und Hafen, 1972, № 11, с.785-791.
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
| Электропривод | 1990 |
|
SU1758820A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1385216A1 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Электропривод | 1978 |
|
SU782109A1 |
| Электропривод бурового станка | 1989 |
|
SU1641969A1 |
| Электропривод транспортного средства | 1986 |
|
SU1359171A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1984 |
|
SU1206942A2 |
| ПРЕЦИЗИОННАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТОКА ЭЛЕКТРОДВИГАТЕЛЯ | 1997 |
|
RU2123756C1 |