Электропривод относится к автоматиированному электроприводу и может быть спользован при автоматизации технологиеских процессов, например, при построеии систем управления электроприводами танков геологоразведочного бурения.
Целью изобретения является повышение производительности путем формирования предельно допустимых механических арактерис ик в повторно кратковременном режиме.
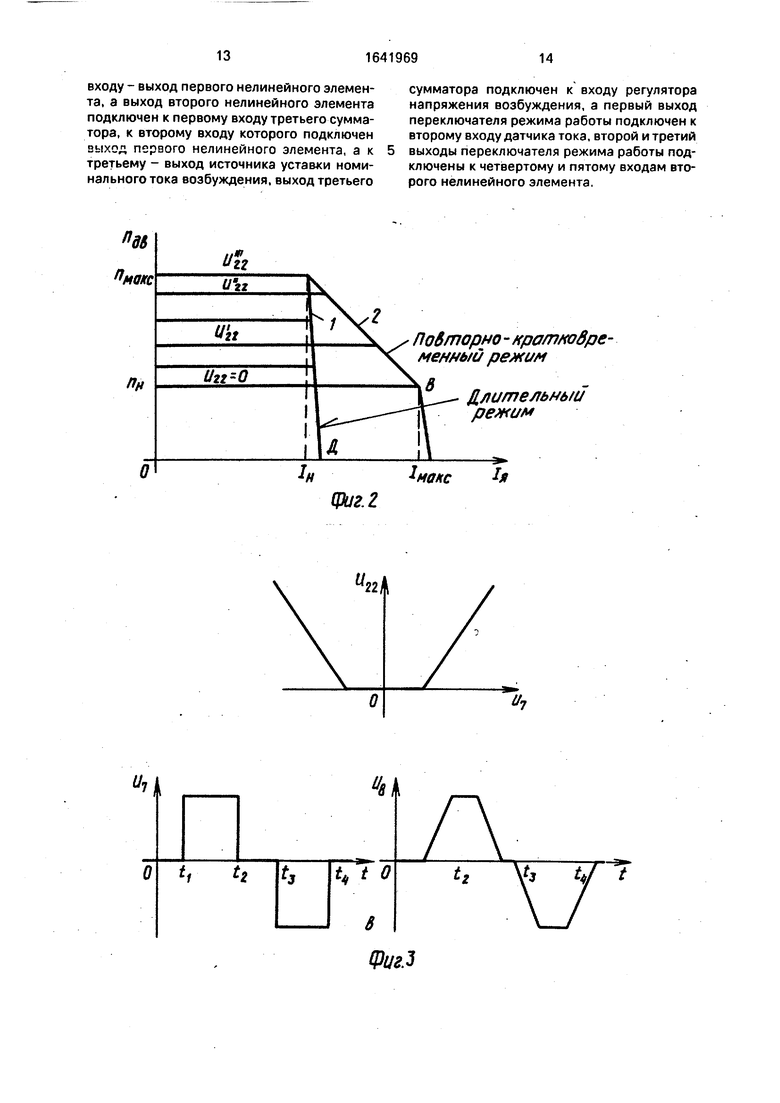
На фиг.1 - приведена функциональная схема электропривода бурового станка; на фиг.2 - электромеханические характеристики электропривода бурового станка; на фиг.3,4 - выходные статические характеристик пвгчоюрых блоков электропривода; на фиг.5 - пример технической реализации нелинейного элемента и его выходные статические характеристики.
В состав эле ропривода входят трансформатор 1 тока, управляемые выпрямители 2,3,4, двигатель 5, переключатель 6 режима работы, задатчик 7 частоты вращения, задатчик 8 интенсивности, первый сумматор 9, регулятор 10 напряжения с прямым и инверсным выходами, ключи 11, 12, второй сумматор 13, блок 14 управления управляемыми выпрямителями 2,3, ключи 15,16, датчик 17 тока, датчик 18 напряжения и датчик 19 тока якоря, блок 20 токовой отсечки, блок 21 переключения с четырьмя управляющими выходами, а также нелинейный элемент 22 с зоной нечувствительности и насыщением, нелинейный элемент 23 с зоной нечувствительности , насыщением и пе- ременным коэффициентом усиления, третий сумматор 24, обмотка 25 возбуждения, регулятор 26 напряжения возбуждения и Олик. 27, управления возбудителем, источник 28 порогового напряжения, источник 29 уставки номинального тока возбуждения.
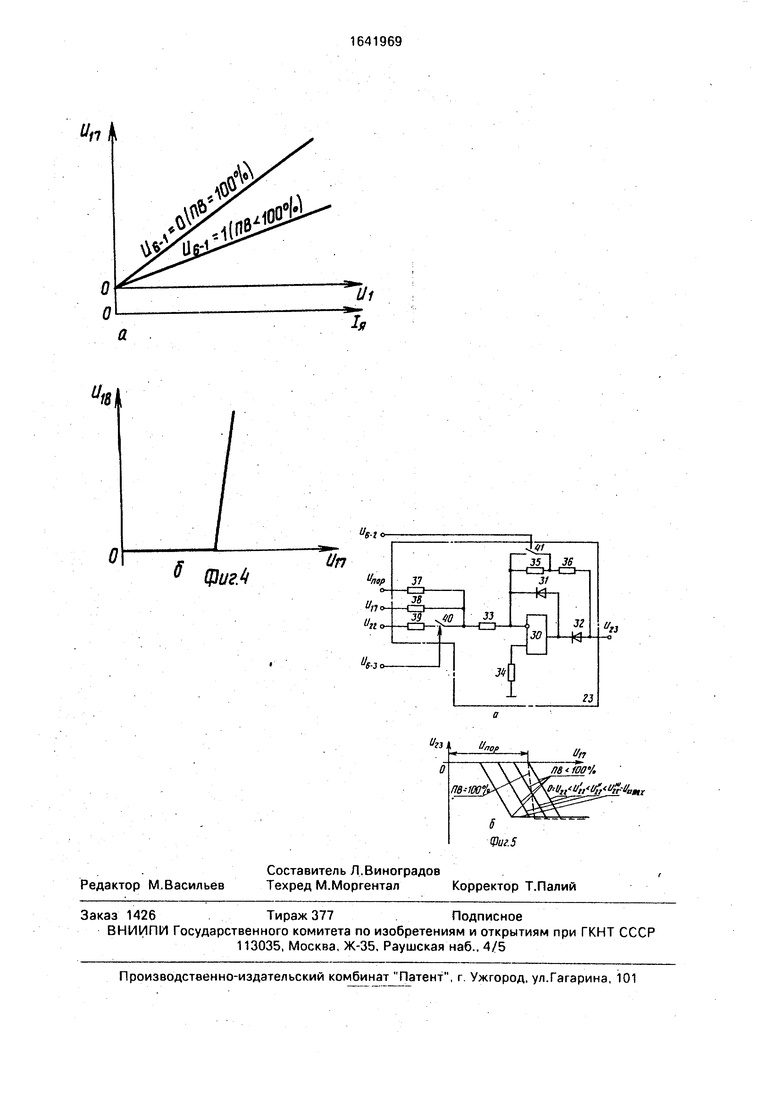
Нелинейный элемент 23 состоит из усилителя 30, диодов 31, 32, резисторов 33-39, контакты 40, 41 переключателя режимов работы.
Задатчик 8 интенсивности разгона и
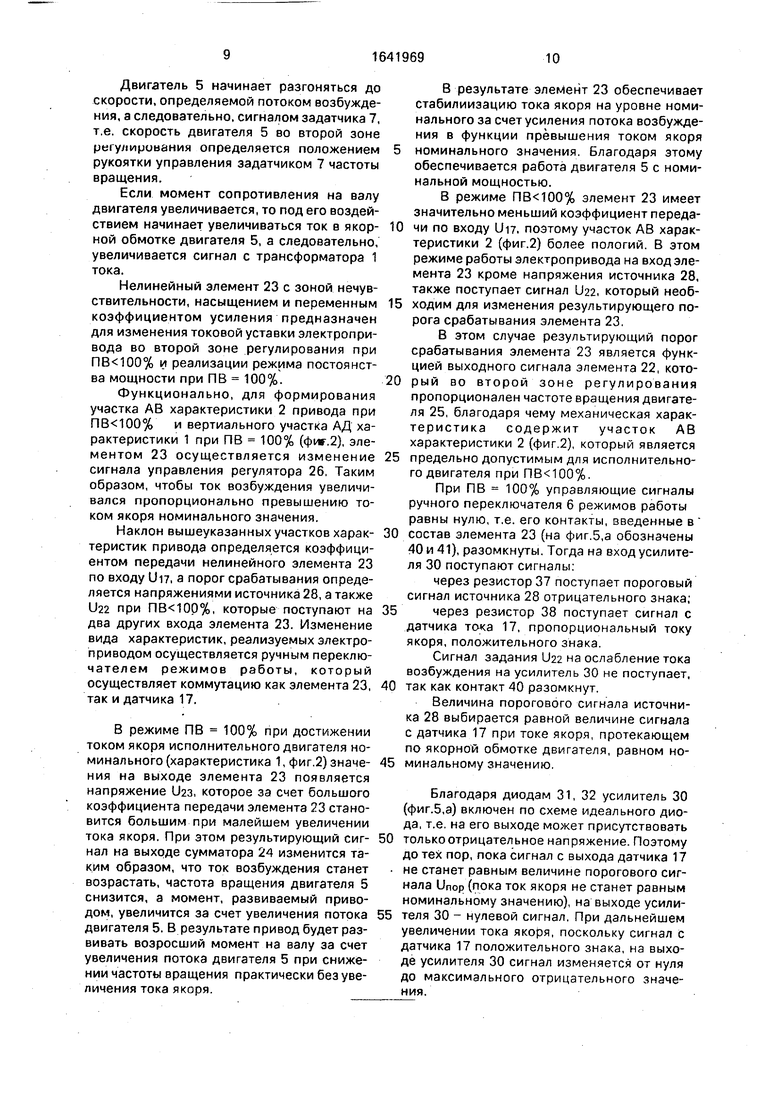
торможения представляет собой интегратор с регулируемыми интенсивностями нарастания и спадания сигнала. Установившийся выходной сигнал задатчика 8 по уровню всегда раве,н входному. В качестве задатчика 8 интенсивности может быть использован сглаживающий фильтр. На фиг.4,б приведена статическая характеристика задатчика 8 интенсивности.
Регуляторы напряжения 10 и 26 - пропорционального типа. Регулятор напряжения 10 имеет прямой и инверсный выходы, может быть реализован на двух операционных усилителях.
Датчик 17 тока предназначен для выпрямления выходного сигнала трансформатора 1 тока. В состав датчика 17 тока введен контакт 6-1 ручного переключателя 6 режима работы, который предназначен для изменения коэффициента передачи датчика 17 тока. .4, а приведены статические характеристики датчика 17 тока. В длительном режиме работы электропривода (ПВ 100%) контакт ручного переключателя режима работы 6 разомкнут, т.е. Ue-1 0, и датчик 17 тока имеет большой коэффициент передачи. В повторно-кратковременном режиме работы электропри вода () контакт переключателя режимов работы 6 замкнут, т.е.
Ue-1 1. и датчик 17 тока имеет меньший коэффициент передачи,
Блок 18 токовой отсечки представляет собой пороговый элемент. При достижении входным сигналом датчика 17 тока значения
порога 18, который может задаваться, например, с помощью стабилитрона, на выходе блока 18 появляется сигнал, который
поступает на второй сумматор 13. А поскольку блок 18токовой отсечки имеет большой коэффициент усиления, при дальнейшем увеличении сигнала с датчика тока 17 выходной сигнал блока 18 быстро нарастает, что приводит к компенсации выходного сигнала регулятора напряжения 10. На фиг.4,6 приведена статическая характеристика блока 18 токовой отсечки.
Блок 21 переключения предназначен для управления ключами 11, 12, 15, 16.
Переключающий блок 21 осуществляется в функции полярности выходного сигнала первого сумматора 9, если в якорной цепи двигателя 5 отсутствует ток (сигнал запрета с лятчика нулевого тока 20). Если полярность выходного сигнала 9 положительная на втором и третьем выходах логического переключающего блока появляются выходные сигналы и ключи 11 и 15 замыкаются. На первом и четвертом выходах сигналы отсутствуют и ключи 12 и 16 разомкнуты. При изменении полярности выходного сигнала сумматора 9 с положительной на отрицательную блок 21 должен переключиться, но не переключится до тех пор, пока ток в якорной цепи исполнительного двигателя 4 не станет равным нулю. В этот момент времени сигнал запрета с выхода датчика 20 тока якоря становится равным нулю и блок 21 переключается. Сигналы на втором и третьем выходах становятся равным нулю и ключи 11 и 15 размыкаются. С другой стороны на первом и четвертом выходах блока 21 появляются сигналы и ключи 12 и 16 замыкаются.
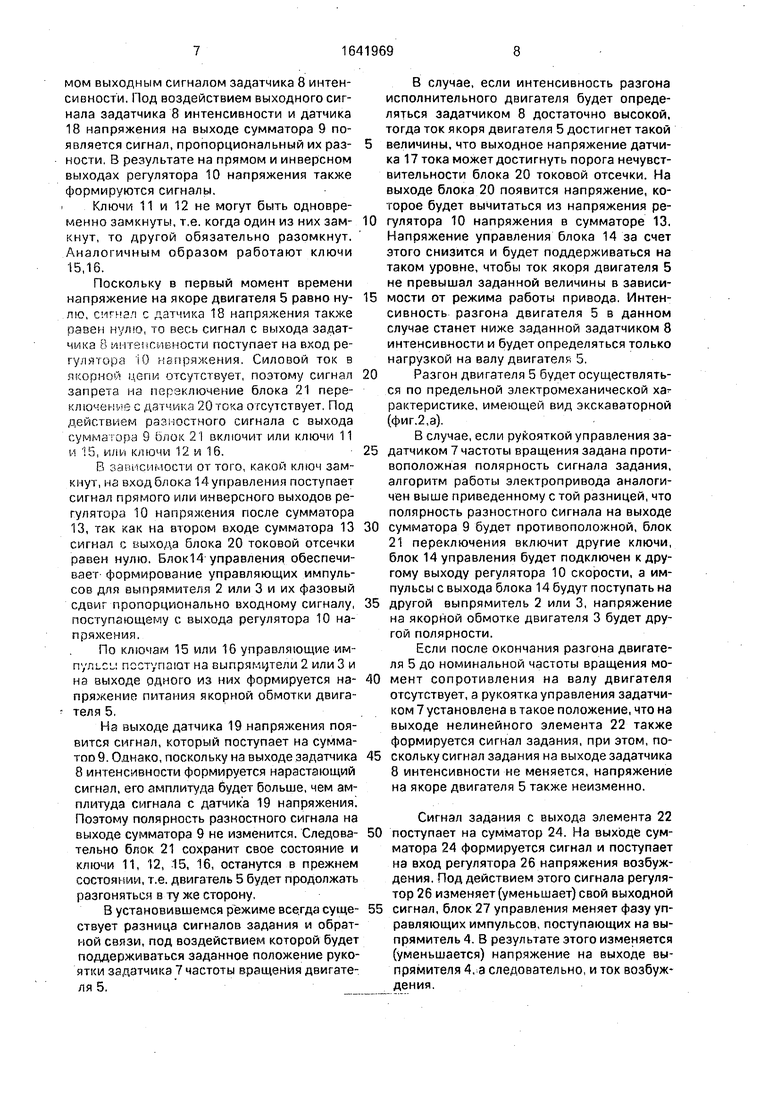
Нелинейный элемент 22 с зоной нечувствительности и насыщением предназначен для ИШПРЛРНИЯ из выходного сигнала задат- чика частоты вращения однополярного положительного сигнала задания на изменение тока возбуждения. На фиг.З, а представлена его статическая характеристика. Он может быть реализован на двух операционных усилителях.
Нелинейный элемент 23 с зоной нечувствительности, насыщением и переменным коэффициентом усиления предназначен для корректировки сигнала задания на изменение тока возбуждения в функции этого сигнала и выходного сигнала датчика 17 тока. На вход элемента 23 заведены три сигнала: пороговый Unop, выходной сигнал блока 22 и сигнал с датчика 17 тока. Кроме того, в состав нелинейного элемента 23 введены два контакта ручного переключателя 6 режимов работы. В длительном режиме работы электропривода (ПВ 100%) контакты переключателя 6 режимов работы разомкнуты и нелинейный элемент 23 имеет
большой коэффициент усиления. Поэтому при превышении сигналом с датчика 17 тока порогового сигнала Unop на выходе элемента 23 появляется выходной сигнал, который 5 поступает на третий сумматор 24. В длительном режиме работы выходной сигнал блока 22 не оказывает влияния на работу нелинейного элемента 23, так как из-за разомкнутого контакта переключателя 6 режи0 мов работы сигнал блока 22 на вход элемента 23 не поступает.
Электропривод работает следующим образом.
При перемещении рукоятки управления
5 задатчиком 7 частоты вращения двигателя на его выходе формируется сигнал задания, который поступает одновременно на вход задатчика 8 интенсивности и элемента 22 с зоной нечувствительности.
0На выходе элемента 22 сигнал равен
нулю до тех пор, пока величина сигнала с выхода задатчика 7 частоты вращения двигателя не превысит зоны нечувствительности элемента 22.
5 Напряжение на выходе задатчика 8 интенсивности изменяется при этом от нуля до некоторого установившегося значения. Зона нечувствительности элемента 22 выбирается равной амплитуде выходного сигнала
0 задатчика 7 частоты вращения двигателя, при которой на якоре двигателя 5 номинальное напряжение.
При дальнейшем перемещении рукоятки 7 управления задатчиком 8 амплитуда
5 выходного сигнала с выхода задатчика 8 интенсивности остается неизменной, а выходной сигнал элемента 22 начинает увеличиваться от нуля до некоторого значения, величина которого определяется углом
0 поворота рукоятки управления задатчиком 7 частоты вращения двигателя
До тех пор, пока исполнительный двигатель 4 не разгонится до номинального числа
5 оборотов, выходной сигнал элемента 22 равен нулю. Поэтому входной сигнал выпрямителя 4 определяется сигналом установки номинального тока возбуждения Цвн, поступающим на сумматор 24 вместе с сигналами
0 элементов 22 и 23, которые равны нулю. При этом по обмотке 25 возбуждения протекает номинальный ток.
Задатчик 7 интенсивности формирует линейно изменяющееся напряжение, ин5 тенсивность изменения которого определяет темп разгона (торможения) двигателя 5. Регулятор 10 напряжения совместно с датчиком 18 напряжения и сумматором 9 образуют контур стабилизации напряжения на якоре двигателя 5 на уровне, определявом выходным сигналом задатчика 8 интенивности. Под воздействием выходного сигала задатчика 8 интенсивности и датчика 18 напряжения на выходе сумматора 9 повляется сигнал, пропорциональный их разности, В результате на прямом и инверсном выходах регулятора 10 напряжения также ормируются сигналы.
Ключи 11 и 12 не могут быть одновременно замкнуты, т.е. когда один из них замкнут, то другой обязательно разомкнут. Аналогичным образом работают ключи 15,16.
Поскольку в первый момент времени напряжение на якоре двигателя 5 равно нулю, сминай с датчика 18 напряжения также оавен нул О, то весь сигнал с выхода задатчика 8 г/шге г.и :1юсти поступает на вход регуляторе iO непряжения. Силовой ток в якорной иепи отсутствует, поэтому сигнал запрета иа переключение блока 21 переключение с датчика 20тока отсутствует. Под действием ра,юстного сигнала с выхода сумма эра 9 Ьлок 21 включит или ключи 11 и 15, или ключи 12 и 16.
В о эчисимости от того, какой ключ замкнут, иа вход блока 14 управления поступает сигнал прямого или инверсного выходов регулятора 10 напряжения после сумматора 13, так как на втором входе сумматора 13 сигнал с выхода блока 20 токовой отсечки равен нулю. Блок14 управления обеспечивает формирование управляющих импульсов длл выпрямителя 2 или 3 и их фазовый сдвиг пропорционально входному сигналу, поступающему с выхода регулятора 10 напряжения.
По ключам 15 или 16 управляющие им- nyjiLCL поступают на выпрямители 2 или 3 и на выходе одного из них формируется напряжение питания якорной обмотки двига- теля 5.
На выходе датчика 19 напряжения появится сигнал, который поступает на сумма- TOD 9. Однако, поскольку на выходе задатчика 8 интенсивности формируется нарастающий сигнал, его амплитуда будет больше, чем амплитуда сигнала с датчика 19 напряжения. Поэтому полярность разностного сигнала на выходе сумматора 9 не изменится. Следовательно блок 21 сохранит свое состояние и ключи 11, 12, 15, 16, останутся в прежнем состоянии, т.е. двигатель 5 будет продолжать разгоняться в ту же сторону,
В установившемся режиме всегда существует разница сигналов задания и обратной связи, под воздействием которой будет поддерживаться заданное положение рукоятки задатчика 7 частоты вращения двигателя 5,
В случае, если интенсивность разгона исполнительного двигателя будет определяться задатчиком 8 достаточно высокой, тогда ток якоря двигателя 5 достигнет такой
величины, что выходное напряжение датчика 17 тока может достигнуть порога нечувствительности блока 20 токовой отсечки. На выходе блока 20 появится напряжение, которое будет вычитаться из напряжения ре0 гулятора 10 напряжения в сумматоре 13. Напряжение управления блока 14 за счет этого снизится и будет поддерживаться на таком уровне, чтобы ток якоря двигателя 5 не превышал заданной величины в зависи5 мости от режима работы привода. Интенсивность разгона двигателя 5 в данном случае станет ниже заданной задатчиком 8 интенсивности и будет определяться только нагрузкой на валу двигателя 5.
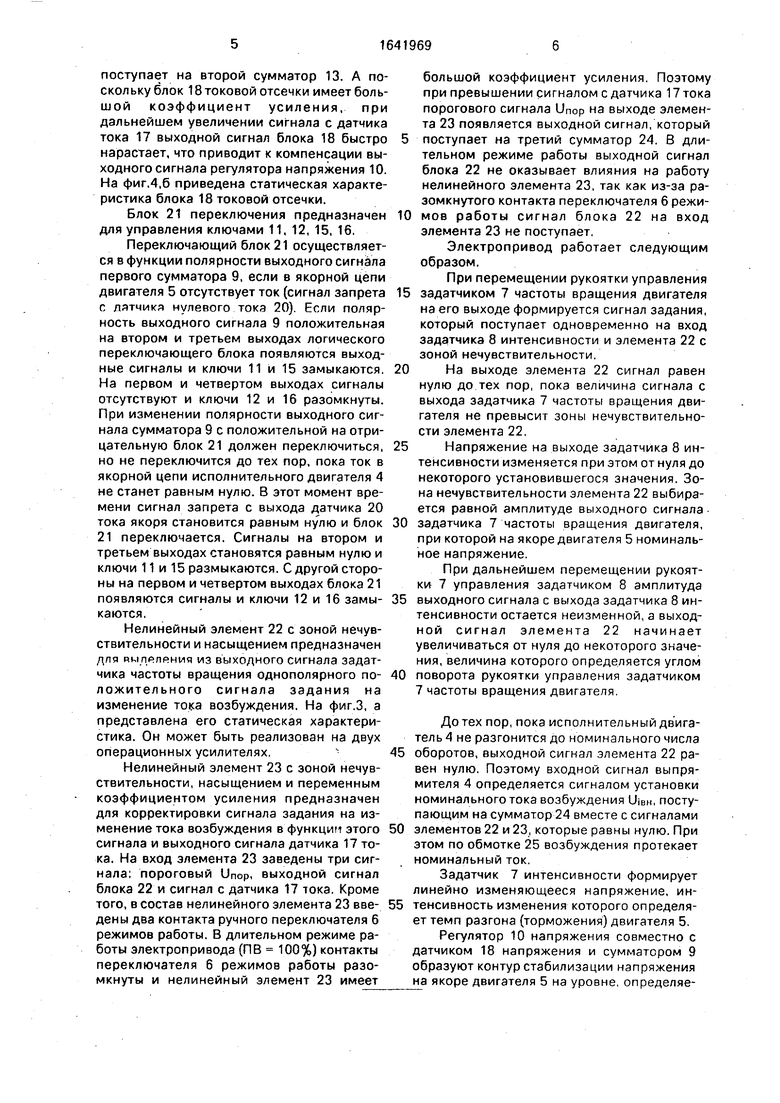
0 Разгон двигателя 5 будет осуществляться по предельной электромеханической характеристике, имеющей вид экскаваторной (фиг.2,а).
В случае, если рукояткой управления за5 датчиком 7 частоты вращения задана противоположная полярность сигнала задания, алгоритм работы электропривода аналогичен выше приведенному с той разницей, что полярность разностного сигнала на выходе
0 сумматора 9 будет противоположной, блок 21 переключения включит другие ключи, блок 14 управления будет подключен к другому выходу регулятора 10 скорости, а импульсы с выхода блока 14 будут поступать на
5 другой выпрямитель 2 или 3, напряжение на якорной обмотке двигателя 3 будет другой полярности.
Если после окончания разгона двигателя 5 до номинальной частоты вращения мо0 мент сопротивления на валу двигателя отсутствует, а рукоятка управления задатчиком 7 установлена в такое положение, что на выходе нелинейного элемента 22 также формируется сигнал задания, при этом, по5 скольку сигнал задания на выходе задатчика 8 интенсивности не меняется, напряжение на якоре двигателя 5 также неизменно.
Сигнал задания с выхода элемента 22 0 поступает на сумматор 24. На выходе сумматора 24 формируется сигнал и поступает на вход регулятора 26 напряжения возбуждения. Под действием этого сигнала регулятор 26 изменяет (уменьшает) свой выходной 5 сигнал, блок 27 управления меняет фазу управляющих импульсов, поступающих на выпрямитель 4. В результате этого изменяется (уменьшается) напряжение на выходе выпрямителя 4, а следовательно, и ток возбуждения.
Двигатель 5 начинает разгоняться до скорости, определяемой потоком возбуждения, а следовательно, сигналом задатчика 7, т.е. скорость двигателя 5 во второй зоне регулирования определяется положением рукоятки управления задатчиком 7 частоты вращения.
Если момент сопротивления на валу двигателя увеличивается, то под его воздействием начинает увеличиваться ток в якорной обмотке двигателя 5, а следовательно, увеличивается сигнал с трансформатора 1 тока.
Нелинейный элемент 23 с зоной нечувствительности, насыщением и переменным коэффициентом усиления предназначен для изменения токовой уставки электропривода во второй зоне регулирования при и реализации режима постоянства мощности при ПВ 100%.
Функционально, для формирования участка АВ характеристики 2 привода при и вертиального участка АД характеристики 1 при ПВ 100% (фиг.2), элементом 23 осуществляется изменение сигнала управления регулятора 26, Таким образом, чтобы ток возбуждения увеличивался пропорционально превышению током якоря номинального значения.
Наклон вышеуказанных участков характеристик привода определяется коэффициентом передачи нелинейного элемента 23 по входу U17, а порог срабатывания определяется напряжениями источника 28, а также 1)22 при , которые поступают на два других входа элемента 23. Изменение вида характеристик, реализуемых электроприводом осуществляется ручным переключателем режимов работы, который осуществляет коммутацию как элемента 23, так и датчика 17.
В режиме ПВ 100% при достижении током якоря исполнительного двигателя номинального (характеристика 1, фиг.2) значе- ния на выходе элемента 23 появляется напряжение U23, которое за счет большого коэффициента передачи элемента 23 становится большим при малейшем увеличении тока якоря. При этом результирующий сигнал на выходе сумматора 24 изменится таким образом, что ток возбуждения станет возрастать, частота вращения двигателя 5 снизится, а момент, развиваемый приводом, увеличится за счет увеличения потока двигателя 5. В результате привод будет развивать возросший момент на валу за счет увеличения потока двигателя 5 при снижении частоты вращения практически без увеличения тока якоря.
В результате элемент 23 обеспечивает стабилиизацию тока якоря на уровне номинального за счет усиления потока возбуждения в функции превышения током якоря 5 номинального значения. Благодаря этому обеспечивается работа двигателя 5 с номинальной мощностью.
В режиме элемент 23 имеет значительно меньший коэффициент переда- 10 чи по входу Ui7, поэтому участок АВ характеристики 2 (фиг.2) более пологий. В этом режиме работы электропривода на вход элемента 23 кроме напряжения источника 28, также поступает сигнал U22, который необ- 5 ходим для изменения результирующего порога срабатывания элемента 23.
В этом случае результирующий порог срабатывания элемента 23 является функцией выходного сигнала элемента 22, кото- 0 рый во второй зоне регулирования пропорционален частоте вращения двигателя 25, благодаря чему механическая характеристика содержит участок АВ характеристики 2 (фиг.2), который является 5 предельно допустимым для исполнительного двигателя при .
При ПВ 100% управляющие сигналы ручного переключателя 6 режимов работы равны нулю, т.е. его контакты, заеденные в 0 состав элемента 23 (на фиг.5,а обозначены 40 и 41), разомкнуты. Тогда на вход усилителя 30 поступают сигналы:
через резистор 37 поступает пороговый
сигнал источника 28 отрицательного знака;
5 через резистор 38 поступает сигнал с
датчика тока 17, пропорциональный току
якоря, положительного знака.
Сигнал задания U22 на ослабление тока возбуждения на усилитель 30 не поступает, 0 так как контакт 40 разомкнут.
Величина порогового сигнала источника 28 выбирается равной величине сигнала с датчика 17 при токе якоря, протекающем по якорной обмотке двигателя, равном но- 5 минальному значению.
Благодаря диодам 31, 32 усилитель 30 (фиг.5,а) включен по схеме идеального диода, т.е. на его выходе может присутствовать
0 только отрицательное напряжение. Поэтому до тех пор, пока сигнал с выхода датчика 17 не станет равным величине порогового сигнала Unop (пока ток якоря не станет равным номинальному значению), на выходе усили5 теля 30 - нулевой сигнал. При дальнейшем увеличении тока якоря, поскольку сигнал с датчика 17 положительного знака, на выходе усилителя 30 сигнал изменяется от нуля до максимального отрицательного значения.
Таким образом, на сумматор 24 с нелинейного элемента 23 поступает максимальный, противоположный по знаку сигналу задания на ослабление тока возбуждения, сигнал, что приводит к уменьшению до нуля сигнала на выходе сумматора 24, а следовательно, к увеличению до номинального тока возбуждения.
Значение тока якоря, при котором сок возбуждения достигнет номинальной вели- чины, определяется коэффициентом усиления 30. Коэффициент усиления 30 по сигналу с датчика 17 достаточно большой, К -20-30, поэтому характеристика электропривода в длительном режиме практически вертикальная (фиг.2, характеристика 1). На фиг.5,б выходная характеристика блока 23 в режиме ПВ 100% изображена пунктирной линией, а соответствующая ей характеристика электропривода на фиг.2, обозначена цифрии 1.
Теперь рассмотрим работу блока 23 в режиме работы при .
В э гом случае контакт 40 подключает на вход усилителя 30 сигнал 1)22 (отрицательно- го знака) через элементы 39 и 33, а контакт 41 замкнут. Следовательно, кроме сигналов с блока 17 и порогового сигнала на вход усилителя 30 будет поступать сигнал задания на ослабление тока возбуждения U22.
Поскольку резистор 35 зашунтирован контактом 41, коэффициент усиления в усилителе 30 К 4 - 5, поэтому выходная характеристика элемента 23 не вертикальная, а пологая. Характеристика электропривода за счет этого также имеет пологий участок АВ (фиг.2), наклон которого определяется коэффициентом усиления усилителя 30.
Сигнал задания на ослабление тока возбуждения поступает на вход усилителя 30 для изменения результирующего порога элемента 23. Результирующий порог складывается из порогового сигнала Unop и сиг- нала задания на ослабление тока возбуждения U22.
Элемент 23 рассчитан таким образом, чтобы при максимальном напряжении задания на ослабление тока возбуждения величина результирующего порога соответствовала номинальному току двигателя 5, а при уменьшении напряжения задания на ослабление тока возбуждения, результирующий порог увеличивался линейно и при IJ22 0 соответствовал максимально допустимому току якоря 1 имакс.
Таким образом, элементом 23 осуществляется формирование участка характеристики электропривода как при изменении напряжения задания на ослабление тока
возбуждения, так и изменении нагрузки на валу двигателя.
Формула изобретения
Электропривод бурового станка, содержащий трансформатор тока, выход которого подключен к датчику тока, выход которого подключен к блоку токовой отсечки, причем выход задатчика частоты вращения подключен к входу первого нелинейного элемента и к входу задатчика интенсивности, выход которого подключен к первому входу первого сумматора, к второму входу которого подключен датчик напряжения, а выход первого сумматора подключен к входу регулятора напряжения, первый выход которого через первый ключ подключен к первому входу второго сумматора, а второй выход регулятора напряжения через второй ключ подключен к первому входу второго сумматора, к второму входу которого подключен выход блока токовой отсечки, а выход второго сумматора через первый блок управления подключен к входам третьего и четвертого ключей, выход третьего ключа подключен к управляющему входу первого управляемого выпрямителя, а выход четвертого ключа подключен к управляющему входу второго управляемого выпрямителя, причем первый и второй управляемые выпрямители включены встречно и входами подключены через трансформатор тока к сети питания, а выходами через датчик тока якоря - к якорю двигателя, выход первого сумматора подключен к первому входу блока переключений, ко второму входу которого подключен выход датчика тока якоря, а первый и второй выходы блока переключений подключены соответственно к управляющим входам первого и второго ключей, третий и четвертый выходы блока переключений подключены к управляющим входам соответственно третьего и четвертого ключей, а регулятор напряжения возбуждения через второй блок управления подключен к третьему управляемому выпрямителю, выход которого подключен к обмотке возбуждения двигателя, отличающийся тем, что, с целью повышения производительности путем формирования предельно допустимых механических характеристик в повторно кратковременном режиме, электропривод снабжен вторым нелинейным элементом, переключателем режима работы, третьим сумматором, источником уставки номинального тока возбуждения и источником порогового напряжения, выход которого подключен к первому входу второго нелинейного элемента, к второму входу которого подключен выход датчика тока, а к третьему
входу - выход первого нелинейного элемента, а выход второго нелинейного элемента подключен к первому входу третьего сумматора, к второму входу которого подключен выход первого нелинейного элемента, а к третьему - выход источника уставхи номинального тока возбуждения, выход третьего
сумматора подключен к входу регулятора напряжения возбуждения, а первый выход переключателя режима работы подключен к второму входу датчика тока, второй и третий выходы переключателя режима работы подключены к четвертому и пятому входам второго нелинейного элемента.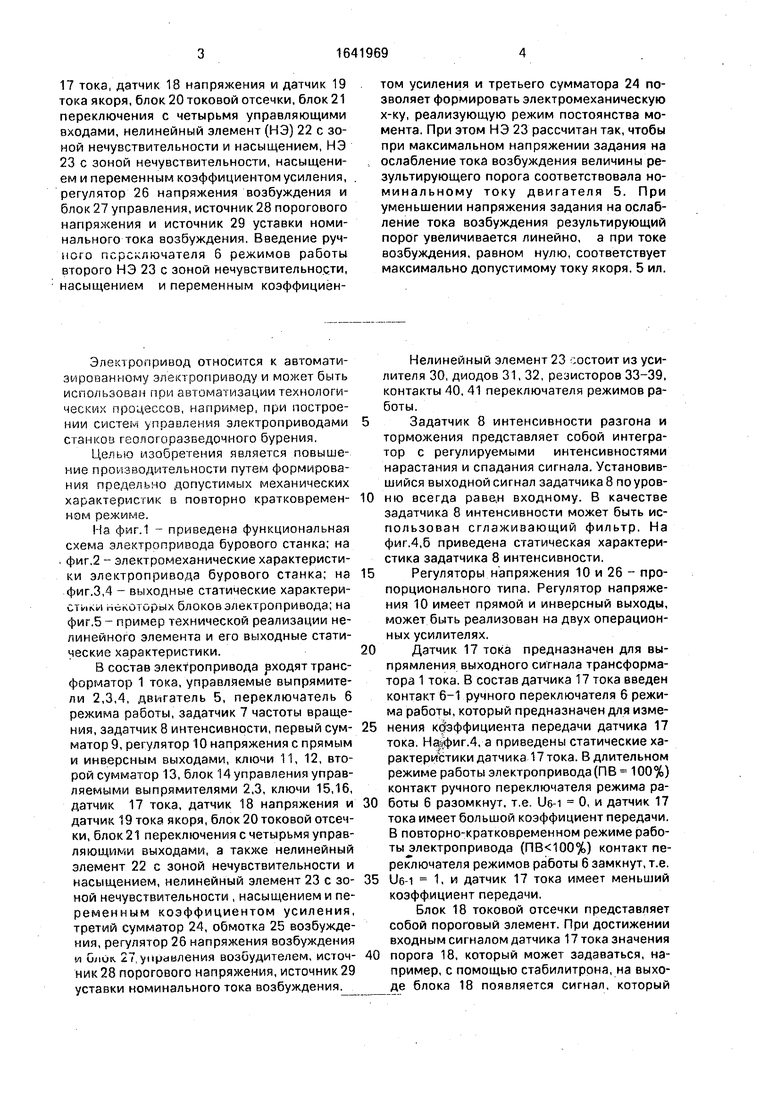
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод бурового станка | 1990 |
|
SU1716065A2 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Электропривод с автономным источником питания | 1984 |
|
SU1236594A1 |
| Способ управления электроприводом постоянного тока механизма с пульсирующей нагрузккой на валу и устройство для его реализации | 1979 |
|
SU855909A1 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| Реверсивный электропривод | 1991 |
|
SU1791951A1 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1979 |
|
SU855910A1 |
| Вентильный электропривод | 1983 |
|
SU1234940A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1973 |
|
SU375743A1 |
Изобретение относится к автоматизированному электроприводу и м.б. использовано при автоматизации технологических Процессов. Цель изобретения - повышение производительности путем формирования предельно допустимых механических х-к в повторно-кратковременном режимах. Устройство содержит трансформатор 1 тока, управляемые выпрямители 2,3, 4, двигатель 5 с переключателем 6 режимов работы и задатчиком 7 частоты вращения, задатчик 8 интенсивности разгона и торможения, сумматоры 9, 13, 24, регулятор 10 напряжения, ключи 11, 12, 16, блок 14 управления, датчик
//
Щи г. 2
и,
t, t о
Повторно - кратковременный режим
а
Длительный режи
1меглс
«81
tz Y V
Фиг.З
On
фиг.4
Un
| Чиликин М.Г | |||
| и др | |||
| Основы автоматизированного электропривода, М.: Энергия, 1974, с.543 | |||
| Богословский А.П | |||
| и др | |||
| Электрооборудование кранов, М.: Машиностроение, 1983, с | |||
| Прибор для определения всасывающей силы почвы | 1921 |
|
SU138A1 |
