Изобретение относится к гидроавтог. мати-ке и может быть использовано при..гидравлических системах промыш денных роботов, имеющих неуравновешенные звенья..
.Известен гидравлический следящий привод робота, содержащий последовател.ьно связанные шаговый электродв-игатель, следящий; золотник с напорг ной и сливной гидролиниями и гидромотор с устройством обратной связи и валомг на котором установлено одно из колес цилиндрической зубчатой передачи, второе колесо которой св;язан.о несамотормозящей винтовой передачей с неуравновешенным звеном робота, -и фиксирующее устройство вал,а гидромотора 1 .
Недостатком известного привода является сложность конструкции и низкая надёжность из-за выполнения фиксирующего устройства в виде гид.роаамка, допускающего -перетечки рабочей жидкости, и медленное перемещение неуравновешенного звена PQ- . бота.
Целью изобретения является
.упрощение конструкции-и повышение надежности.
Указанная цель достигается тем, что привод снабжен обратным клапаном, установленным .на напорной гидролинии, на зубчатом-колесе, установленном на валу гидромотора, .выполнены по окружности торцевые выступы, а фиксирующее устройство выполнено в виде двуплечего поворотного рычага, одно из плеч которо10го с одной стороны снабжено .выступом для взаимодействия с торцевыми выступами зубчат-ого колеса и подпружиненного с противоположной стороны, и однополостного плунжерного гидро15цилиндра, плунжер которого взаимодействует с другим плечом рычага со стороны пружины, при этом полость гидроцилиндра подключена ко входу обратного клапана.
20
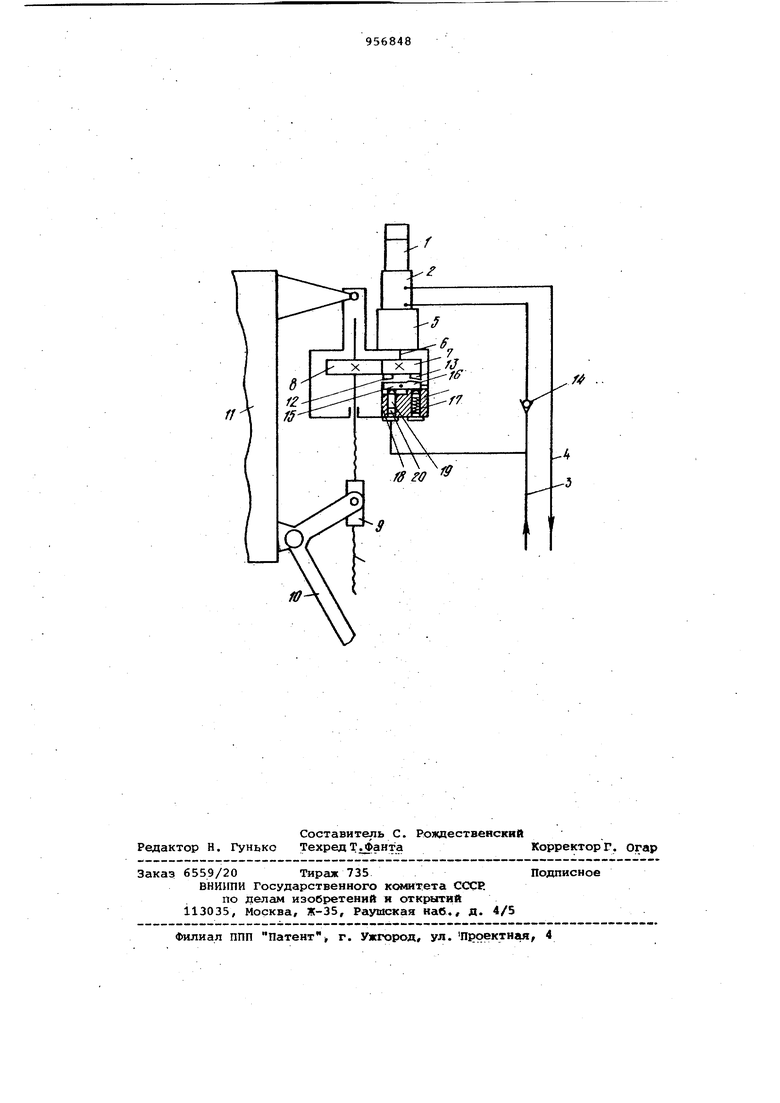
На чертеже изображена схема гидравлического следящего привода робота.
Привод содержит последовательно связанные шаговый электродвигатель
25 1, следящий золотник 2 с напорной и сливной гидролиниями 3 и 4 соответственно и гидромотор 5с устройством обратной связи (не изображено) к валом 6, на котором установлено
30 одно из колёс 7 цилиндрической зубчатой передачи, второе колесо 8 которой связано несамотормозящей винтовой передачей 9 с неуравновешенным звеном 10 робота 11. На зубчатом колесе 7 выполнены по окружности торцевые выступы 12 и 13, на напорной гидролинии 3 установлен обратный . клапан 14, а вал 6 гидромотора 5 снабжен фиксирующим устройством, вьшолненным в виде двуплечего поворотного рычага 15, одно из плеч которого с одной стороны снабжено выступом 16 для взаимодействия с выступаи ш 12 и 13 и подпружинено пружиной 17 с противоположной стороны, и однополостного плунжерного гидроцилиндра 18, плунжер 19 которого взаимодействует со вторым плечом рычага 15 со стороны пружины 17, при Этом полость 20 гидроцилиндра 18 подключена ко входу обратного клапана 14.
Гидравлический следящий привод рбота работает следующим образом.
При подаче давления в гидролинию 3 плунжер 19 выдвигается и нажимает на рычаг 15. При этом рычаг 15 поворачивается, сжимая пружину 17, и выходит из зацепления с.торцевыми выступами 12 и 13. При работе шаговго электродвигателя 1 и следящего золотника 2, гидромотор 5 вращает вал 6 и через зубчатые колеса 7 и 8 и винтовую передачу 9 передает движение звену 10 робота 11.
При падении давления в напорной гидролинии 3 пружина 17 стремится повернуть рычаг 15. и зафиксировать зубчатое колесо 7. Неуравновешенное звено 10 стремится через винтов передачу 9 проверунть вал 6 гидромотора 5, что (через обратную механическую связь гидромотора с золотником) приводит к реверсированию гидромотора относительно гидролиний 3 и 4. Благодаря наличию обратного клапана 14, выход рабочей жидкости из гидромотора 5 в гидролинию перекрыт .и гидромотор удерживает.звено 10 от резкого падения. Происходит медленное опускание звена 10 вследствие внутренних утечек в гидромо торе 5 из золотника 2. После поворота зубчатого колеса 7 до совпадения выступа 16 рычага 15 с промежутком между торцевыми выступами 12 и 13 рычаг производит фиксацию вала 6 гидромотора 5, и следователь но, неуравновешенного звена 10,
При повторном включении привода давления в гидролинии 3 привод фиксируется, а поскольку электродвигатель
1сохранил свое первоначальное положение, появившееся в процессе фиксации, рассогласование между угловым положением зубчатого колеса 7
и электродвигателем 1 устраняется действием следящей системы золотник
2- гидромотор 5 и звено 10 устанавливается в первоначальное положение.
Применение предлагаемого изобретения в гидравлических системах промышленных роботов, имеющих неуравновешенное звено, позволит упростить конструкцию и повысить надежность и, тем самым, повысить экономическую эффективность их использования.
Формула изобретения
Гидравлический следящий привод робота, содержащий последовательно связанные шаговый электродвигатель, следящий золотник с напорной и сливной гидролиниями и гидромотор с устройством обратной связи и валом, на котором установлено одно из колес цилиндрической зубчатой передачи, другое колесо которой связано несамотормозящей винтовой передачей с неуравновешенным звеном робота, и фикаируквдее устройство вала гидромотора, отли ч а ющи и с я тем, что, с целью упрощения конструкции и повышения надежности, он снабжен обратным клапаном, установленным На напорной гидролинии, на зубчатом колесе, установленном на валу гидромотора, выполнены по окружности торцевые выступы, а фиксирующее устройство выполнено в виде двуплечего поворотного рычага, одно из плеч которого с одной стороны снабжено выступом для взаимодействия с торцевыми выступами зубчатого колеса и подпружинено с противоположной стороны, и однополостного плунжерного гидроцилиндра, плунжер которого взаимодействует с другим 1глечом рычага со стороны пружины, при этом полость гидроцилиндра подключена к входу обратного клапана.
Источники информации, принятые во внимание при экспертизе
1. Белянин П.П. Промышленные роботы.М. , Машиностроение, 1975, с. 154, рис. 74.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесступенчатая гидромеханическая трансмиссия | 1984 |
|
SU1194715A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД МЕХАНИЗМА ПОДАЧИ ЛЕСОПИЛЬНОЙ РАМЫ | 1973 |
|
SU370028A1 |
| Стенд для испытаний рулевого управления | 1976 |
|
SU682786A1 |
| Гидравлическое рулевое управление транспортного средства | 1984 |
|
SU1142349A1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Рекуперативная гидравлическая передача и регулятор подачи гидромашины | 1981 |
|
SU989209A1 |
| РЕКУПЕРАТИВНАЯ РЕВЕРСИВНАЯ БЕССТУПЕНЧАТАЯ ГИДРОТРАНСМИССИЯ КОЛЕСНОЙ МАШИНЫ | 2003 |
|
RU2259928C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| Гидравлическая система синхронизации гидроцилиндров | 1980 |
|
SU889905A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТНЫМИ И НАГРУЗОЧНЫМИ РЕЖИМАМИ | 1991 |
|
RU2010734C1 |