(54) МАШИНА ОБЪЕМНОГО ДЕЙСТВИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина объемного действия | 1980 |
|
SU987166A2 |
| Машина объемного действия | 1980 |
|
SU1002663A1 |
| Машина объемного действия | 1979 |
|
SU909306A1 |
| СПОСОБ РАБОТЫ ПОРШНЕВОГО КОМПРЕССОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2023 |
|
RU2818615C1 |
| Машина для чесания волокнистых материалов, например, хлопка или штапельного волокна | 1953 |
|
SU99006A1 |
| Прямозубая машина объемного действия | 2021 |
|
RU2761701C1 |
| Электрореологический управляемый клапан | 1980 |
|
SU885602A1 |
| МЕМБРАННЫЙ НАСОС | 1992 |
|
RU2035620C1 |
| РОТОРНАЯ МАШИНА | 2005 |
|
RU2282063C1 |
| Прямозубый насос | 2021 |
|
RU2760722C1 |

1
Изобретение относится к насосостроению и компрессоростроению и касается машин объемного действия.
Наиболее близкой к изобретению является машина объемного действия, содержащая корпус, горизонтально установленную в нем торообразную рабочую камеру с всасывающим и нагнетательным окнами, размещенные в камере рабочие органы и механизм привода, выполненный в виде индукционных катущек, охватывающих рабочую камеру 1.
Недостаток известной машины объемного действия - невозможность регулирования выходных параметров.
Цель изобретения - обеспечение регулирования выходных п араметров.
Указанная цель достигается тем, что в корпусе над камерой установлен с возможностью вращения и осевого перемещения диск, в котором на окружности, имеющей радиус,- равный радиусу оси камеры, выполнены продольные щели различной длины, а индукционные катущки, кроме расположенной между нагнетательным и всасывающим окнамк, по ходу движения рабочих органов ycтaJHOBлeны с возможностью перемещения вдоль камеры и снабжены захватами, пропущенными через щели диска.
При этом каждая щель диска имеет форму двух круглых отверстий, соединенных прорезью, причем отверстия, размещенные первыми или вторыми по ходу движения рабочих органов, равнорасположены по окружности диска, а каждый захват выполнен в виде дифференциального пальца, имеющего участки больщего и меньшего диаметров, равных соответственно диаметру от10верстий щели и ширине прорези.
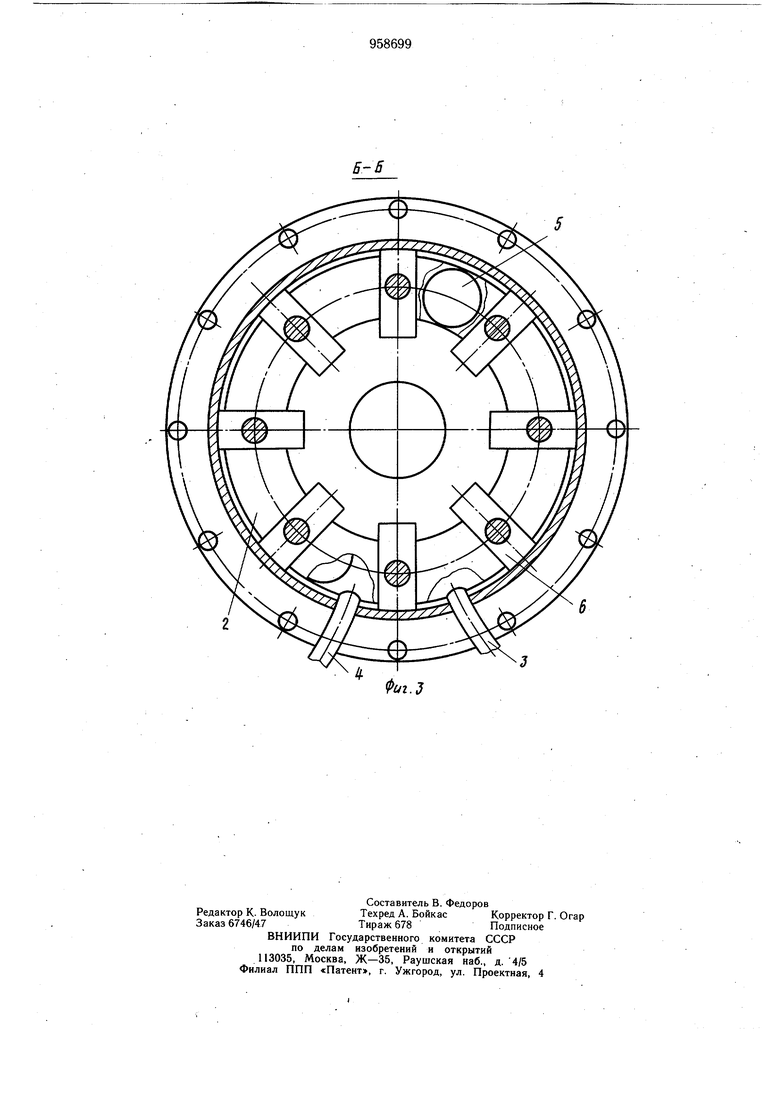
На фиг. 1 схематично изображена машина объемного действия, поперечный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Описываемая мащина объемного дейст15вия содержит корпус 1, горизонтально установленную в нем торообразную рабочую камеру 2 с всасывающим и нагнетательным окнами 3 и 4, размещенные в камере 2 рабочие органы 5 и механизм привода, вы20полненый в виде индукционных катушек 6, охватывающих рабочую камеру 2. В корпусе 1 над камерой 2 установлен с возможностью вращения и осевого перемещения диск 7, в котором на окружности, имеющей радиус, равный радиусу оси камеры 2, выполнены продольные щели 8 различное длины, а индукционные катушки 6, кроме расположенной между нагнетательным и всасывающим окнами 4 и 3, по ходу движения рабочих органов 5 установлены с возможностью перемещения вдоль камеры 2 и снабжены захватами 9, пропущенными через щели 8 диска 7. Каждая щель 8 диска 7 имеет форму двух круглых отверстий 1Q и 11, соединенных прорезью 12, причем отверстия 10, размещенные первыми по ходу движения рабочих органов 5 равнорасположены по окружности диска 7, а каждый захват 9 вьшолнен в виде дифференциального пальца, имеющего участки 13 и 14 большего и меньшего диаметров, равных соответственно диаметру отверстия 9 и 10 щели 8 и щирине прорези 12. Машина работает следующим образом. От источника электроэнергии через равные промежутки времени подается напряжение поочередно на каждую индукционную катушку 6 и таким образом создается вращающее магнитное поле, увлекающее за собой рабочие органы 5, которые совершают движение по круговой оси торообразной рабочей камеры 2. При положении захватов 9, как показано на фиг. 2, 3, индукционные катушки 6 равномерно расположены по круговой оси рабочей камеры 2, вследствие чего рабочие органы 5 будут двигаться с одинаковой скоростью друг за другом, сохраняя заключенный между ними объем постоянным. При таком положении захватов 9 машина работает как насос для перекачивания жидкостей. При повороте захватов 9 против часовой стрелки (фиг. 2), предварительно поджав вверх диск 7, ийдукционные катушки 6, кроме одной, расположенной между нагнетательным 4 и всасывающим 3 окнами, по ходу движения рабочих органов 5 перемещаются вдоль рабочей камеры 2 таким образом, что они размещаются с переменным шагом, уменьшающимся в направлении от всасывающего окна 3 к нагнетательному 4. Это происходит за счет различной длины щелей 8, уменьщающейся по окружности от всасывающего и нагнетательного окон 3 и 4. При таком положении захватов 9 движение рабочих органов 5 по рабочей камере 2 происходит с постоянным замедлением, вследствие чего первоначальный объем, заключенный между двумя соседни.ми рабочими органами 5, при прохождении их мимо всасывающего окна 3 постепенно уменьшается, сжимая находящийся там газ, который в дальнейшем поступает к потребителю. Для перевода работы устройства в качестве насоса для перекачки жидкостей диск 7 поднимают и вращают по часовой стрелке. Поворот диска 7 осуществляется до момента, при котором индукционные катушки 6 равномерно располагаются по оси рабочей камеры 2, затем диск 7 опускают. На фиг. 2 изображена машина объемного действия, в которой равномерно по окружности диска 7 расположены окна 10, размещенные первыми по ходу движения рабочих органов 5. Однако равномерно расположенными по окружности диска 7 могут быть и окна 11, размещенные вторыми по ходу движения рабочих органов 5. Таким образом, предлагаемое выполнение машины объемного действия дает возможность обеспечить регулирование выходных параметров машины. Формула изобретения 1.Машина объемного действия, содержащая корпус, горизонтально установленную в нем торообразную рабочую камеру с всасывающим и нагнетательным окнами, размещенные в камере рабочие органы и механизм привода, выполненный в виде индукционных катушек, охватывающих рабочую камеру, отличающаяся тем, что, с целью обеспечения регулирования выходных параметров, в корпусе над камерой установлен с возможностью вращения и осевого перемещения диск, в котором на окружности, имеющей радиус, равный радиусу оси камеры, выполнены продольные щели различной длины, а индукционные катушки, кроме расположенной между нагнетательным и всасывающим окнами, по ходу движения рабочих органов установлены с возможностью перемещения вдоль камеры и снабжены захватами, пропущенными через щели диска. 2.Машина по п. 1, отличающаяся тем, что каждая щель диска имеет форму двух круглых отверстий, соединенных прорезью, причем отверстия, размещенные первыми или вторыми по ходу движения рабочих органов, равнорасположены по окружности диска, а каждый захват выполнен в виде дифференциального пальца, имеющего участки большего и меньшего диаметров, равных соответственно диаметру отверстия щели и ширине прорези. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2828758, кл. F 04 В 17/04, 1979.
