Изобретение относится к области механизации устройств для захвата бурильных н обсадных труб при их снуске нлн в процессе бурения нефтяных скважин.
Изв(1стные клиньевые захваты для удержания на весу коло1)1Ы труб требуют от обслуживаюнгего персонала значительных физических усилий для нодьема клиньев посадки их в отверстие ротора.
Этот недостаток устраняется ирименением возду1нного долн-;рата, нри помойки которого нронзводнтся вертикальное неремен1ен1 е клиньев. Однако для нитанна воздуинюго домкрата сжатым воздухом требуется специальная ко: н1рессорная установка в буровой.
Между тем нодавляюи1,ее чис.ло буровых установок имеет электрический привод, что вынуждает обслуживать клнньевой захват вручную.
Настояии-1м изобретением предлагается конструкция механизированного клиньевого захвата с использованием электродвигателя.
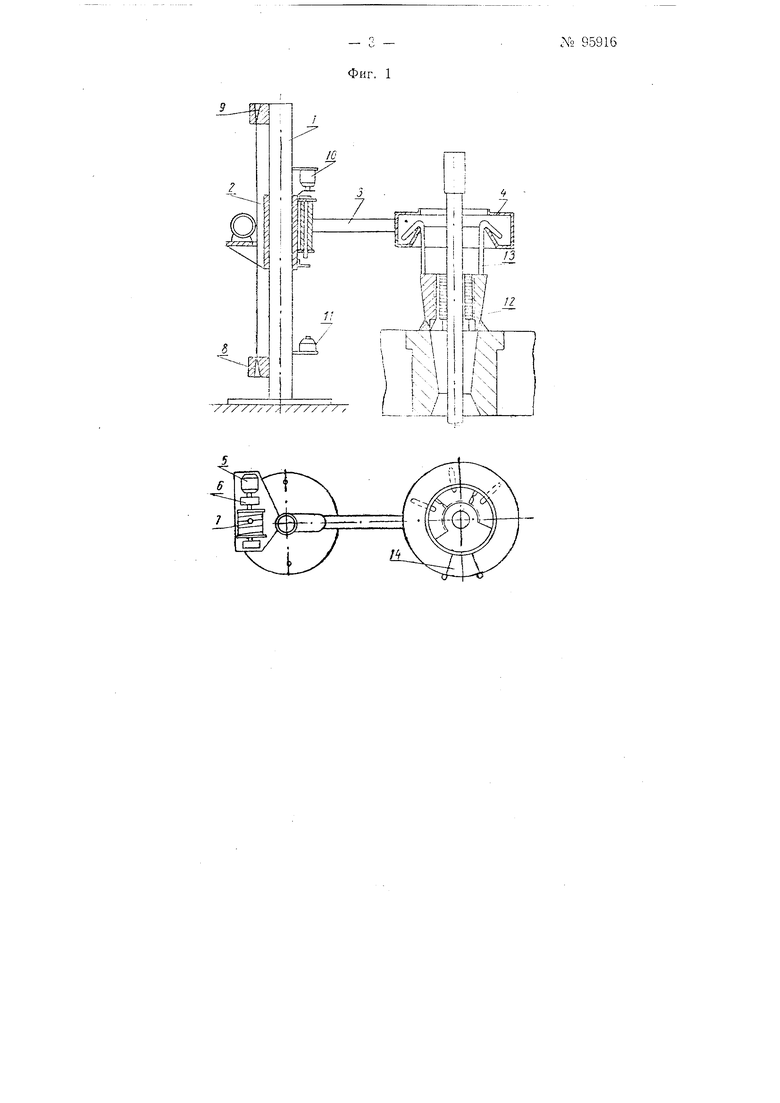
На фиг. 1 ноказана схема этого захвата.
Вдоль колонны / может свободно перемещаться каретка 2, к которой шарннрно нрикренлена поперечная труба 5 с держателем клиньев 4. На каретке установлен двигатель 5, который через редуктор 6 нриводит во барабан 7.
На ба15абане намотано 3-4 В1:тка каната, концы которого закреи.:1е11Ы в заж1шах 8 и 9 колонки, а середина каната закреплена на барабане.
Прн вра1не;1ни барабана каретка 2 передвигается вверх н вииз вдоль колонки.
Для автоматической остановки каретки в крайних положениях служат коиневые выключатели 10 н //.
В держателе 4 нодвешеп комнлект клиньев 12, звенья которых соедннены между собой нтарнирно, причем каждое звено снабжено крючком /..
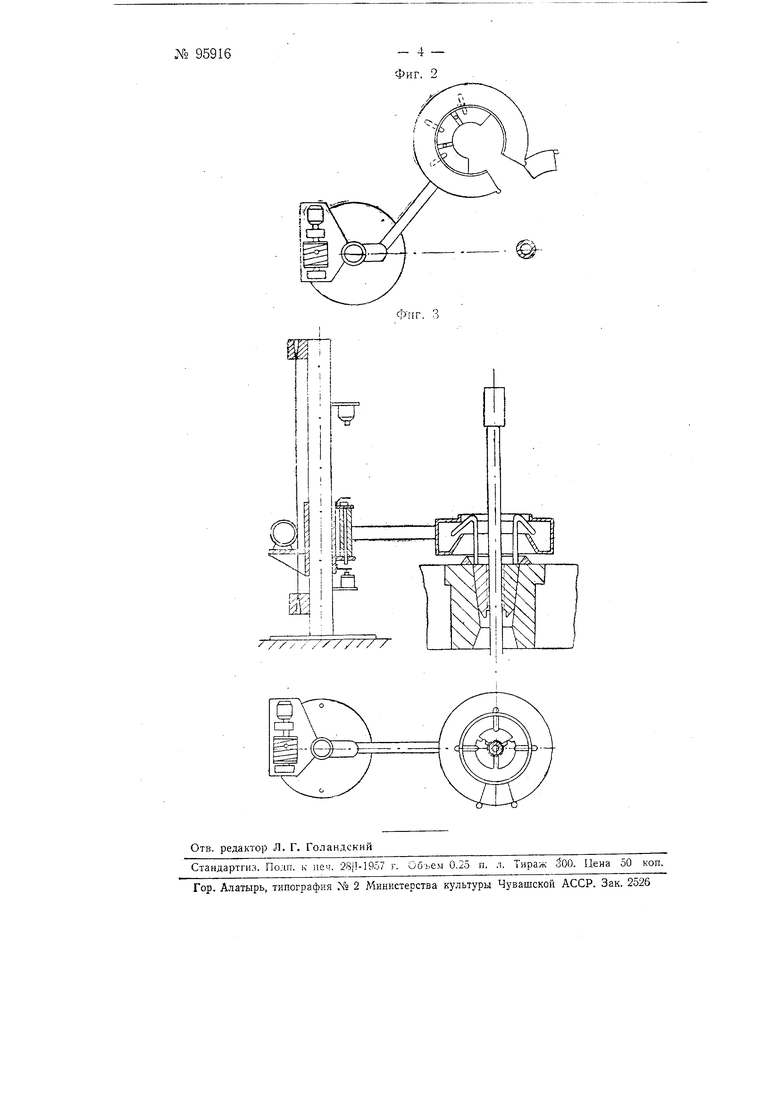
Нри верхнем ноложении держателя 4 клниья извлечены из ротора н разведены относнтельно трубы благодаря 1 алнчню у держателя вггутреннего направляющего коиуса. В таком ноложе1н-1и, открыв дверцу 14 и новериув держатель в горизонтальной нлоскостн относительно колонки, как это показано на фиг. 2, можно удалить клинья от трубы.
Когда держатель находится в нижнем положении, (фиг. 3) 1;льнья под действием силы своего веса входят в отверстие ротора и зажимают трубу.
При этом, труба нодвсшена эксцентрично относительно отверстия в роторе и сила веса клиньев окажется недостаточной для отвода трубы к центру, двигающийся вниз держатель 4 нажимает своей верхней крышкой на крючки 13 клиньев, обжимает клинья вокруг трубы и снособствует перемеигеиию клиньев в отверстие ротора.
Предмет и з о б р е Ti е н и я
1. Клипьевой захват для бурильных и обсадных труб с механизированным иеремеш,еиием клиньев. отличающийся тем, что, с це,тыо использования электропривода для неремеи1еиия клиньев, на подвижной каретке, скренленной с держателем клиньев перемещающейся вдоль вертикальной колонки, установлен электродвигатель, соединенный с барабаном, охватываемым несколькими витками каната, концы которого закренлены на концах колонки.
2. Кл1Н1ьевой захват по п. 1,отлич а ю щ и и с я тем, что кольцеобразный держатель снабжен конусом, осуществляющим нодъем и развод клиньев нри номощи укрепленных на них крюков, и крышкой, служащей для посадки клиньев на место путем воздействия этой крышки на крюки.
Фиг. 1