Изобретение относится к автоматике и может быть использовано для управления гидравлическими силовыми исполнительными органами лесозаготовительных, строительных, дорожных и др. машин.
Известны устройства для управления гидравлическими силовыми исполнительными органами машин, содержа1цие рычаги или педали, посредством тяг, связанные с гидрораспредёлителем, управляющим гидравлическими силовыми исполнительными органами 1 - 2.
Недостатком этих устройств является .возможность возникновения резких динамических нагрузок на конструкцию узлов машин.
Наиболее близким по технической сущности к предлагаемому является устройство для ручного управления силовыми исполнительньлмй органами машин, содержащее блок питания, орган управления и электромеханический преобразователь, выход которого связан через гидрораспрёдели-, тель с силовым исполнительным органом. Электромеханический преобразователь выполнен в виде электромагнита электрически . связанного с органом управления, а механически - с гидрораспределителем 3.
Недостаток известного устройства низкая надежность, которая связана с перегрузкой его узлов.
Цель изобретения - повышение надежности устройства.
Указанная цель достигается тем, что устройство содержит три пере10менных резистора, два реле, два концевых, выключателя, датчик нейтрального положения гидрораспределителя, два путевых датчика и генератор импульсов, выход которого через после15довательно соединенные первый замыкающий контакт первого путевого датчика и размыкающий контакт первого реле соединен с одним входом и через первый замыкающий контакт второго
20 путевого датчика и. размыкающий контакт второго реле - с другим входсм электромеханического преобразователя, подвижные контакты переменных резисторов механически соединены с
25 органом управления и электрически с первым входом генератора импульсов, со вторым входом которого через второй запоминающий контакт первого путевого датчика соединены
30 первые выводы первого и второго переменных резисторов, через первый замыкающий контакт второго реле и второй замыкающий контакт второго путевого датчика - соответствующие выводы третьего переменного резистора и второй вывод первого переменного резистора, через первый замыкающий контакт первого реле - второй вывод второго переменного резистора, вход первого реле соединен с выходом блока питания через замыкающий контакт первого концевого выключателя, через последовательно соединенные замыкающий контакт датчка нейтрального положения гидрораспределителя и второй замыкающий контакт первого реле и через последовательно соединенные замыкающий контакт второго концевого выключателя, второй замыкающий контакт второго реле и второй замыкающий контакт певого реле, а вход второго реле соединен с выходом блока питания через замыкающий контакт второго концевог выключателя,
Кроме того, электромеханический преобразователь содержит коммутатор выходы которого подключены к входу шагового электродвигателя, выходной вал которого соединен с входом преобразователя угол - линейное перемещение ,
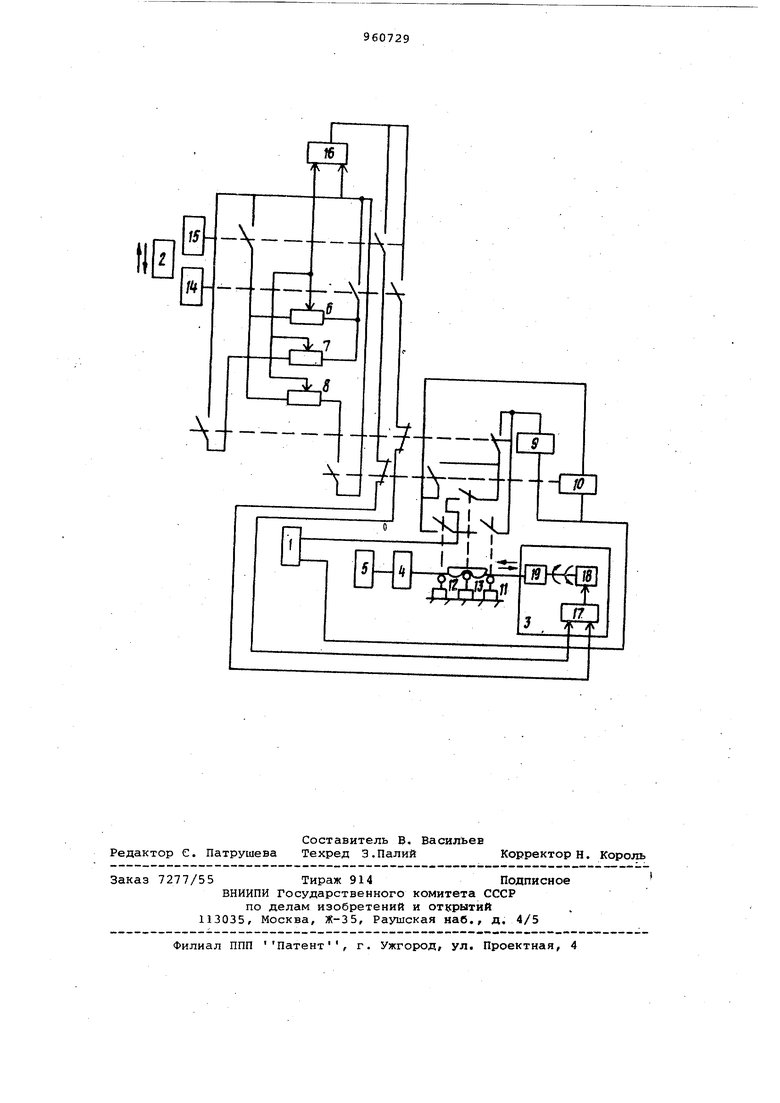
На чертеже представлена блок-схема предлагаемого устройства,
Устройство содержит блок 1 питания, орган 2 управления, электромеханический преобразователь. 3, гидрораспределитель 4, силовой исполнительный орган 5, три переменных резистора 6-8; два реле 9-10; два концевых выключателя 11-12; датчик 13 нейтрального положения гидрораспределителя , два путевых датчика .14-15; генератор 16 импульсов, коммутатор 17, шаговый электродвигатель 18, преобразователь 19 угол линейное перемещение.
Устройство работает следующим образом.
При перемещении органа 2 управления из нейтрального положения вклчается датчик 14. Ко входу генератора 16 подключаются соответствующие резисторы 6-7 и к одному из входов (прямому) преобразователя 3 подключается выход генератора 16,
Подвижные контакты резисторов 67, перемещаясь вместе с органом 2 управления, уменьшают входное сопротивление цепей генератора 16. На вход преобразователя 3 поступают импульсы возрастающей частоты, вследствие чего преобразователем 19 перемещается шток золотника гидрораспределителя 4 и начинается плавное движение исполнительного органа 5. Датчик 13 включается и готовит цепь самоблокировки 9.
Для остановки исполнительного органа 5 необходимо орган 2 управления перемещать в обратном направлении . При этом выключается датчик 14 и включается датчик 15, которые своими -контактами переключают резисторы 6-8 большим сопротивлением на вход генератора 16 и последний запирается (прекращает генерацию), а его выход подключается ко второму (реверсному) входу преобразователя 3.
По мере обратного движения органа 2 управления сопротивление резисторов 6 - 8 уменьшается и генератор 16 начинает вырабатывать последовательность импульсов возрастающей частоты. Преобразователь 3 начинает плавно отрабатывать реверсный ход, перемещая через преобразователь 19 шток золотника гидрораспределителя 4 в обратном направлении. В итоге исполнительный орган 5 замедляет свое движение и при возвращении шток золотника в нейтральное положение останавливается. Выключается датчик 13 и разрывает цепь самоблокировки реле 9.
В режиме максимального расхода жидкости через золотник гидрораспределителя 4 работа устройства аналогична описанной до момента прихода золотника в зону нечувствительности В зоне нечувствительности золотника замыкается один из концевых выключателей, например 11, который включает соответствующее реле 9, последнее самоблокируется через контакт датчика 13 .
Реле 9 разрывает цепь управления преобразователем 3 и золотник гидрораспределителя 4 останавливается. Исполнительный орган 5 продолжает движение с максимальной скоростью. Для его остановки производится реверс органа 2 управления и переключение резисторов 6 - 8 и входа преобразователя 3.
При реверсе штока золотника гидрораспределителя 4 размыкается выключатель 11, но реле 9 остается на самоблокировке. В нейтральном (среднем) положении золотника размыкается контакт датчика 13, разблокируя реле 9, Исполнительный орган 5 останавливается в заданной точке.
Применение предлагаемого устройства для управления гидравлическими силовьми исполнительными органами машин предотвращает возникновение перегрузок конструкций узлов машины, и тем самым повышает их надежность.
Формула изобретения
1, Устройство для управления гидравлическими силовыми исполнительными органами машин, содержащее блок питания, орган управления и электромеханический преобразователь, выход которого связан через гидрораспределитель с силовым исполнительным opraVioM, отличающееся тем, что, с целью, повышения надежности устройства, оно содержит три переменных резистора, два. реле, два концевых выключателя, датчик нейтрального положения гидрораспределителя , два путевых датчика и генератор импульсов, выход которого через последовательно соединенные первый замыкающий контакт первого путевого датчика и размыкающий контакт первого реле соединен с одним входом и через первый замыкающий контакт второго путевого датчика и размыкающий контакт второго реле - с другим входом электромеханического преобразователя, подвижные контакты переменных резисторов механически соединены с органом управления и электрически - с первым входом генератора импульсов, со вторым входом которого через второй замыкающий контакт первого путевого датчика I соединены первые выводы первого и второго переменных резисторов, через первый замыкающий контакт второго реле и второй замыкающий контакт второго путевого датчика - соответствующие выводы третьего переменного резистора и второй вывод первого переменного резистора, через первый замыкающий контакт
первого реле - второй вывод второго . переменного резистора, вход первого реле соединен с выходом блока питания через замыкающий контакт первого концевого выключателя, через последовательно соединенные замыкающий контакт датчика нейтрального положения гидрораспределителя и второй замыкающий контакт первого реле и через последовательно соединенные
замыкающий контакт второго концевого выключателя, второй замыкающий контакт второго реле и второй замыкающий контакт первого реле, а вход второго реле соединен с выходом блока питания через замыкающий контакт второго концевого выключателя.
2.Устройство по п. 1, о т л ичающееся тем, что электромеханический преобразователь содержит коммутатор, выходы которого подключены к входу шагового электродвигателя, выходной вал которого соединен с входом преобразователя угол линейное перемещение.
Источники информации,
принятые во внимание при экспертизе
1. ТО и ИЭ -ковшового экскаватора . ЭО-4121, Ковровский экскаваторный завод,.1976.
2. ТО и ИЭ ВПМ ЛП-19 Иошкар-Олинский завод лесного машиностроения, 1976.
3.Отчет по НИР. Воронежский лесотехнический институт, per.
74048468, с. 6 - 15, 1974 .(прототип)..
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмоэлектрогидравлический следящий позиционный привод подачи инструмента | 1974 |
|
SU488450A1 |
| Устройство дистанционного управления исполнительным механизмом | 1981 |
|
SU1040465A1 |
| Устройство для управления шнекороторным экскаватором | 1988 |
|
SU1629417A1 |
| Устройство для проверки исправности комплектов релейной защиты | 1980 |
|
SU970558A1 |
| ЭЛЕКТРОПРИВОД УСТРОЙСТВА ТРАНСПОРТИРОВКИ | 1991 |
|
RU2063343C1 |
| Система программного управления подачей длинномерного материала в рабочую зону обрабатывающей машины | 1986 |
|
SU1335932A1 |
| Устройство для управления и защиты электродвигателя переменного тока | 1989 |
|
SU1683117A1 |
| Устройство для пуска реверсивного электродвигателя | 1984 |
|
SU1259453A1 |
| Устройство для максимальной и минимальной защиты | 1978 |
|
SU792413A1 |
| Устройство для коммутации силовых электрических цепей | 1979 |
|
SU1003188A1 |