Изобретение относится к управление процессом разработки грунта с помощью шнекороторных экскаваторов-каналокопа- телей, применяющихся при отрытии магистральных мелиоративных каналов.
Цель изобретения - повышение производительности и надежности работы,
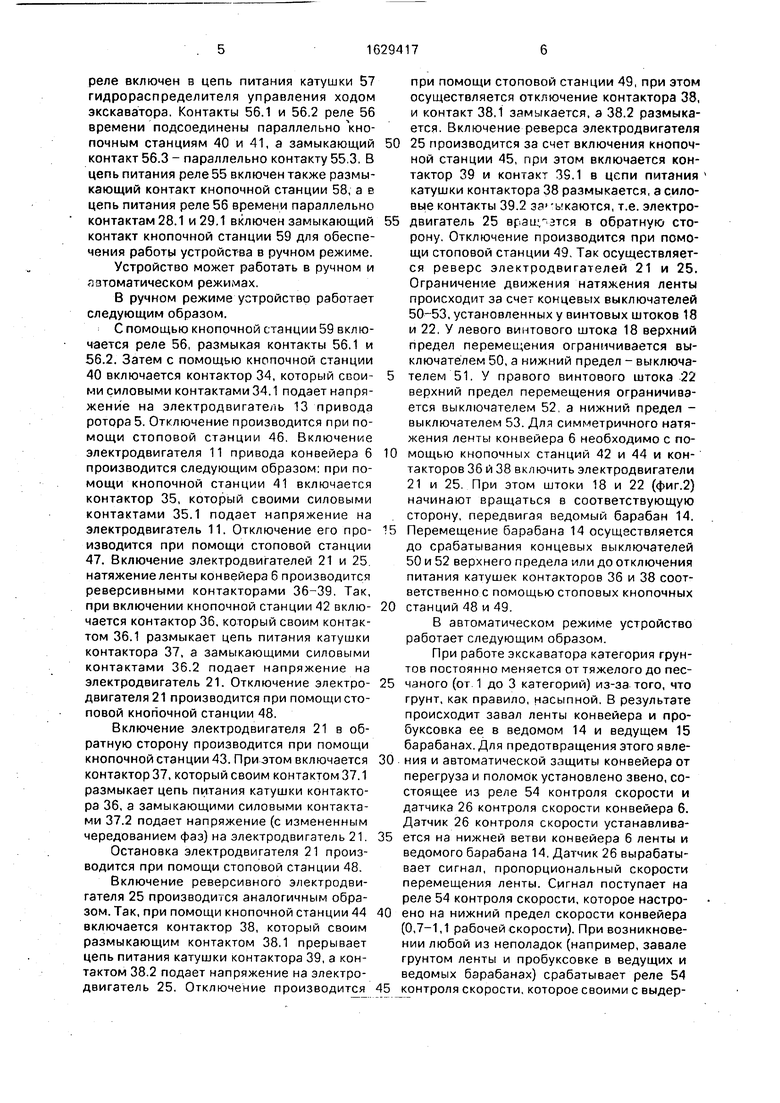
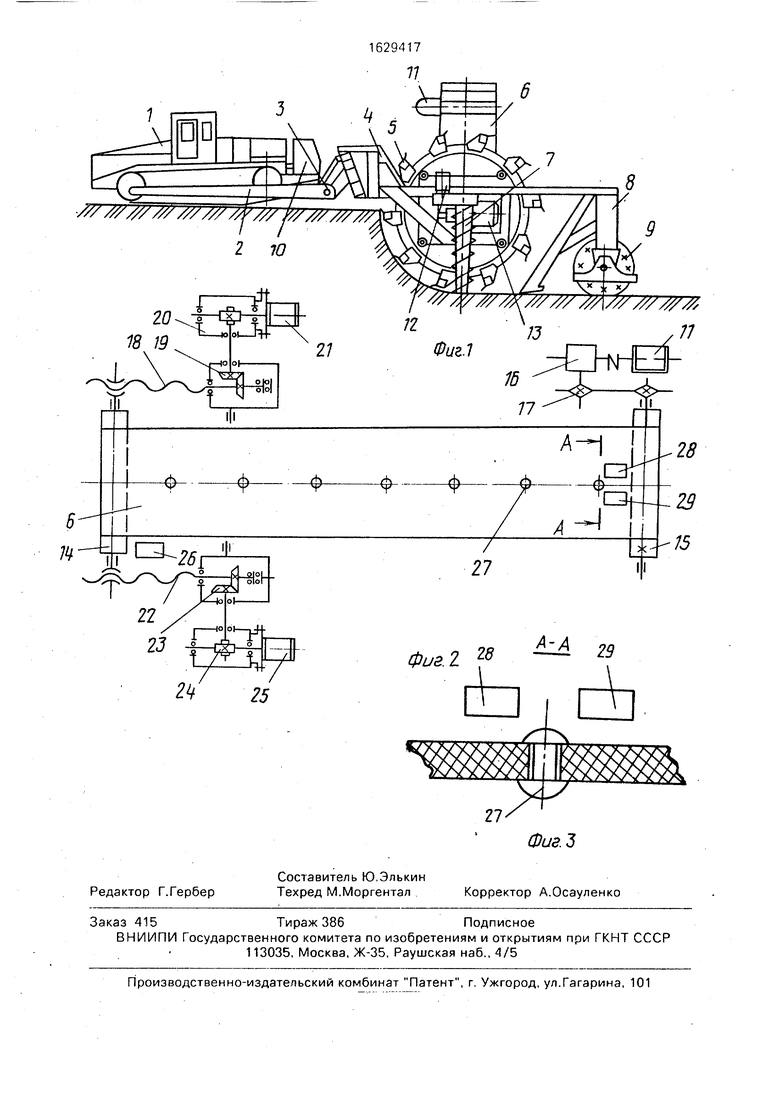
На фиг.1 показан шнекороторный экскаватор, общий вид; на фиг,2 - кинематическая схема одного из конвейеров; на фиг.З - разрез А-А на фиг.2; на фиг.4 - принципиальная схема устройства.
Шнекороторный экскаватор-каналоко- патель (фиг.1) представляет собой самоходную машину непрерывного действия, состоящую из тягача 1, рамы 2 тягача, соединенной при помощи шарнира 3 с рабочим органом 4. Рабочий орган 4 включает ротор 5 для разработки и поднятия грунта на два конвейера (на фиг.1 условно показан один конвейер 6), предназначенный для выброса подаваемого грунта из канала. Два шнека (на фиг.1 условно показан один шнек 7) выполняют операцию по разработке боковых откосов канала. Для поддержания хвостовой части рабочего органа 4 предусмотрена колесная опора, состоящая из рамы 8 и колеса 9. В задней части тягача 1 установлен генератор 10 переменного тока, обеспечивающий электроэнергией электродвигатели приводов экскаватора. Так, конвейер 6 приводит в движение электродвигателем 11, шнек 7 приводится в движение электродвигателем 12, а ротор 5 приводится в движение электродвигателем 13.
Отвальный ленточный конвейер (фиг.2) состоит из двух барабанов: ведомого 14 и ведущего 15.
Ведущий барабан 15 приводится в движение от электродвигателя через редуктор 16 в цепную передачу 17. Натяжение ленты конвейера 6 со стороны ведомого барабана 14 осуществляется при помощи левого винтового штока 18, шестеренчатой передачи 19, редукюря 20 и электродвигателя 21,
правого винтового штока 22, шестеренчатой передачи 23,-редуктора 24 и электродвигателя 25.
Для предотвращения пробуксовывания
и завала грунтом ленты конвейера 6 у ведомого барабана 14 установлен датчик 26 контроля скорости. Контроль за работой конвейера 6 при сбегании ленты с барабанов 14 и 15 в сторону осуществляется за счет запрессованных вдоль оси ленты конвейера 6 постоянных магнитов 27, выполненных в виде двух сферических сегментов (фиг.З) и путевых магнитодинамических выключателей 28 и 29.
Защита от перегрузок и коротких замыканий электродвигателей 11, 13, 21 и 25 осуществляется при помощи автоматических выключателей 30-33. Включение электроприводов 11, 13, 21 и 25 осуществляется при
помощи контакторов 34-39, которые своими
замыкающими силовыми контактами 34.1,
35.1, 36.1, 37.1, 38.1 и 39.1 создают цепь
питания электродвигателям 11, 13,21 и 25.
Включение контакторов производится
при помощи кнопочных станций 40-45. Отключение контакторов 34-39 производится при помощи стоповых кнопочных станций 46-49.
Ограничение (с двух сторон) хода винтовых штоков 18 и 22 при натяжении ленты конвейера 6 осуществляется соответственно двумя парами концевых выключателей 50,51 и 52, 53.
Выход датчика 26 контроля скорости
ленты и конвейера подключен к управляющему входу реле 54 контроля скорости, замыкающий контакт которого включен в цепь питания промежуточного реле 55.
В цепь питания реле 56 времени включены параллельно соединенные замыкающие контакты 28.1 и 29.1 магнитодинамических выключателей 28 и 29. Через размыкающие контакты 55.1 и 55.2 промежуточного реле 55 подается питание на катушки контакторов 34 и 35, а контакт 55.3 этого
реле включен в цепь питания катушки 57 гидрораспределителя управления ходом экскаватора. Контакты 56.1 и 56,2 реле 56 времени подсоединены параллельно Кнопочным станциям 40 и 41, а замыкающий контакт 56.3 - параллельно контакту 55.3. В цепь питания реле 55 включен также размыкающий контакт кнопочной станции 58, а в цепь питания реле 56 времени параллельно контактам 28.1 и 29.1 включен замыкающий контакт кнопочной станции 59 для обеспечения работы устройства в ручном режиме.
Устройство может работать в ручном и азтоматическом режимах.
В ручном режиме устройство работает следующим образом.
С помощью кнопочной станции 59 включается реле 56, размыкая контакты 56.1 и 56.2. Затем с помощью кнопочной станции 40 включается контактор 34, который спои- ми силовыми контактами 34.1 подает напряжение на электродвигатель 13 привода ротора 5. Отключение производится при помощи стоповой станции 46. Включение электродвигателя 11 привода конвейера 6 производится следующим образом: при помощи кнопочной станции 41 включается контактор 35, который своими силовыми контактами 35.1 подает напряжение на электродвигатель 11. Отключение его про- изводится при помощи стоповой станции 47. Включение электродвигателей 21 и 25 натяжение ленты конвейера 6 производится реверсивными контакторами 36-39. Так, при включении кнопочной станции 42 вклю- чается контактор 36, который своим контактом 36.1 размыкает цепь питания катушки контактора 37, а замыкающими силовыми контактами 36.2 подает напряжение на электродвигатель 21. Отключение электро- двигателя 21 производится при помощи стоповой кнопочной станции 48.
Включение электродвигателя 21 в обратную сторону производится при помощи кнопочной станции 43. При этом включается контактор 37, который своим контактом 37.1 размыкает цепь питания катушки контактора 36, а замыкающими силовыми контактами 37.2 подает напряжение (с измененным чередованием фаз) на электродвигатель 21.
Остановка электродвигателя 21 производится при помощи стоповой станции 48.
Включение реверсивного электродвигателя 25 производится аналогичным образом. Так, при помощи кнопочной станции 44 включается контактор 38, который своим размыкающим контактом 38.1 прерывает цепь питания катушки контактора 39, а контактом 38.2 подает напряжение на электродвигатель 25. Отключение производится
при помощи стоповой станции 49, при этом осуществляется отключение контактора 38, и контакт 38.1 замыкается, а 38.2 размыкается. Включение реверса электродвигателя 25 производится за счет включения кнопочной станции 45, при этом включается контактор 39 и контакт 39.1 в цепи питания катушки контактора 38 размыкается, а силовые контакты 39.2 эа -ь каются, т.е. электродвигатель 25 в обратную сторону. Отключение производится при помощи стоповой станции 49, Так осуществляется реверс электродвигателей 21 и 25. Ограничение движения натяжения ленты происходит за счет концевых выключателей 50-53, установленных у винтовых штоков 18 и 22, У левого винтового штока 18 верхний предел перемещения ограничивается выключателем 50, а нижний предел - выключателем 51. У правого винтового штока 22 верхний предел перемещения ограничивается выключателем 52, а нижний предел - выключателем 53. Для симметричного натяжения ленты конвейера 6 необходимо с помощью кнопочных станций 42 и 44 и контакторов 36 и 38 включить электродвигатели 21 и 25. При этом штоки 18 и 22 (фиг.2) начинают вращаться в соответствующую сторону, передвигая ведомый барабан 14. Перемещение барабана 14 осуществляется до срабатывания концевых выключателей 50 и 52 верхнего предела или до отключения питания катушек контакторов 36 и 38 соответственно с помощью стоповых кнопочных станций 48 и 49.
В автоматическом режиме устройство работает следующим образом.
При работе экскаватора категория грунтов постоянно меняется от тяжелого до песчаного (от 1 до 3 категорий) из-за того, что грунт, как правило, насыпной, В результате происходит завал ленты конвейера и пробуксовка ее в ведомом 14 и ведущем 15 барабанах. Для предотвращения этого явления и автоматической защиты конвейера от перегруза и поломок установлено звено, состоящее из реле 54 контроля скорости и датчика 26 контроля скорости конвейера 6. Датчик 26 контроля скорости устанавливается на нижней ветви конвейера 6 ленты и ведомого барабана 14. Датчик 26 вырабатывает сигнал, пропорциональный скорости перемещения ленты. Сигнал поступает на реле 54 контроля скорости, которое настроено на нижний предел скорости конвейера (0,7-1,1 рабочей скорости). При возникновении любой из неполадок (например, завале грунтом ленты и пробуксовке в ведущих и ведомых барабанах) срабатывает реле 54 контроля скорости, которое своими с выдержкой времени нормально открытыми контактами 54.1 включает промежуточное реле 55. Реле 55 размыкающим контактом 55.1 останавливает вращение электродвигателя 13 ротора 5, размыкающим контактом 55.2 отключает электродвигатель 11 конвейера 6, а замыкающим контактом 55.3 подает питание на катушку 57 гидрораспределителя управления ходом тягача 1, останавливая последний.
При завале грунтом конвейера 6 и провисании его ленты неминуемо смещение последней с оси барабаном из-за несимметричного натяжения и больших провисов. Поэтому одновременно происходит срабатывание магнитодинамических выключателей. Так, например, при смещении ленты влево срабатывает магнитодинамический выключатель 28 и через замыкающий контакт 28.1 питание подается на катушку реле 56 времени, которое через размыкающие контакты 56.1 и 56.2 и замыкающий контакт 56.3 обеспечивает соответственно отключение электродвигателя 13 привода ковшового ротора электродвигателя 11 привода конвейера1 и остановку тягача. При остановке конвейера срабатывает реле 54 контроля скорости ленты конвейера, своим контактом 54.1, обеспечивая включение промежуточного реле 55.
Одновременно будет происходить выравнивание конвейера 6 с помощью электродвигателей 21 и 25 и винтовых штоков 18 и 22. Замыкающий контакт 28,2 обеспечивает питание катушки контактора 36, включающего электродвигатель 21, воздействующий на винтовой шток 18, который осуществляет натяжение конвейерной ленты с левой стороны. В свою очередь, замыкающий контакт 28.3 и контактор 39 включается, электродвигатель 25, который, вращаясь в сторону, противоположную вращению электродвигателя 21, воздействует на винтовой шток 22, ослабляя тем самым правую сторону ленты.
Ограничение натяжения ленты контролируется концевым выключателем 50 верхнего предела винтового штока 18 и конечным выключателем 53 нижнего предела винтового штока 22. При натяжении ленты подобным образом она перемещается к центру в исходное рабочее положение. Магнитодинамический выключатель 28 выходит из сферы влияния магнитов 27. Замыкающие контакты 28.1-28.3 выключателя 28 размыкаются, отключается реле 56 времени, которое с выдержкой времени замыкает свои контакты 56.1 и 56.2 и размыкает контакт 56.3. Затем с помощью размыкающего контакта 58 прерывается цепь питания реле 55 (контакт 54.1 замкнут, так как конвейер остановлен, т.е. реле 54 контроля скорости находится в рабочем состоянии).
Размыкающие контакты 55.1 и 55.2 замыкаются, а замыкающий контакт 55.3 размыкается. При этом тягач начинает двигаться, и запускаются электродвигатели 13 и 11 приводов ротора и конвейера. При достижении лентой конвейера 6 номинальной
0 скорости реле 54 отключается, контакт 54.1 размыкается, после чего размыкающий контакт кнопочной станции 58 возвращается в исходное положение.
При сбегании ленты конвейера 6 вправо
5 срабатывает путевой магнитодинамический выключатель 29, который через контакты 29.1-29.3 включает реле 56, контакторы 37 и 38 после срабатывания реле 54 контроля скорости и реле 55. При этом останавлива0 ются электродвигатели 13 и 11. а тягач 1 прекращает движение.
Одновременно происходит выравнивание перекосившейся ленты конвейера 6 электродвигателями 21 и 25 при помощи
5 винтовых шнеков 18 и 22. Включается контактор 38, обеспечивающий включение электродвигателя 25, воздействующего на шток 22, который осуществляет натяжение конвейерной ленты с правой стороны. Так0 же включается контактор 37 и электродвигатель 21. который, вращаясь в сторону вращения двигателя 25, воздействует на винтовой шток 18, ослабляя конвейерную ленту с левой стороны.
5 Ограничение натяжения ленты контролируется конечным выключателем 52 верх- него предела штока 22 и конечным выключателем 51 нижнего предела штока 18. При этом лента перемещается к центру конвей0 ера в исходное рабочее положение. Магнитодинамический вйключатель 29 выходит из сферы влияния магнитов 27. Его контакты 29,1-29.3 возвращаются в исходное положение, отключаются реле 56 времени и кон5 такторы 37 и 38. После размыкания контакта кнопочной станции 58 отключается реле 55, обеспечивая включение электродвигателей 13 и 11 и движение тягача 1. При достижении лентой конвейера заданной скорости
0 отключается реле 54, размыкая свой контакт 54.1, после чего замыкается контакт кнопочной станции 58.
Технологический рабочий цикл восстановлен, производственный процесс вошел в
5 свой нормальный режим.
В качестве датчика 26 контроля скорости ленты конвейера и реле 54 контроля скорости можно использовать, например, магнитоиндуктивный датчик ДМ-2, тахоге- нераторный датчик УПДС или датчик типа
БКВ совместно с реле скорости и аварийной блокировки типа РСА.
В качестве промежуточного реле 55 и реле 56 времени можно применить соответственно двухпозиционное реле типа РП12УХЛ4 и реле времени типа ВЛ-59УХЛ4.
В качестве магнитодинамических выключателей можно, например, использовать путевые выключатели, предназначенные для определения прохождения контрольных точек передвижными механизмами.
Применение изобретения позволит применить на экскаваторе электрический привод рабочих органов с автономным питанием электроэнергией, увеличить производительность, исключить завалы конвейеров, шнеков и сделать процесс технологически непрерывным.
Формула изобретения
1. Устройство для управления шнекоро- торньгм экскаватором, включающее электродвигатель привода ковшового ротора, два электродвигателя приводов двух ленточных конвейеров, катушку гидрораспределителя управления ходом тягача, контакторы включения электродвигателей приводов ковшового ротора и конвейеров, отличающее- с я тем, что, с целью повышения производительности и надежности работы, оно снабжено двумя блоками контроля и управления ленточными конвейерами, каждый из которых состоит из двух электродвигателей натяжения ленты конвейера, четырех контакторов, двенадцати кнопочных станций, датчика скорости и реле контроля скорости ленты конвейера, промежуточного реле, четырех концевых выключателей, реле времени, двух магнитодинамических выключателей, постоянных магнитов, закрепленных с шагом на ленте конвейера, при этом катушка первого контактора подключена к источнику питания через цепь последовательно соединенных размыкающих контактов первой кнопочной станции, первого концевою выключателя, второго контактора и параллельно соединенных между собой замыкающих контактов второй кнопочной станции и первого магнитодинамического выключателя, катушка второго контактора подключена к источнику питания через цепь последовательно соединенных размыкающих контактов первой кнопочной станции, второго концевого выключателя, первого контактора и параллельно соединенных между собой замыкающих контактов третьей кнопочной станции и второго магнитодинамического выключателя, причем силовые замыкающие
контакты первого контактора включены в цепи питания первого электродвигателя натяжения ленты конвейера, а силовые замыкающие контакты второго контактора 5 включены в цепи питания того же двигателя с измененным порядком чередования фаз, при этом катушко третьего контактора подключена к источнику питания через цепь последовательно соединенных размыкаю- 10 щих контактов четвьрюй кнопочной станции, третьего концевого выключателя, четвертого контактора и паралельно соединеных между собой замыкающих контактов второго магнитодинамического выключателя и 15 пятой кнопочной станции, катушка четвертого контактора подключена к источнику питания через цепь последоватетьно соединенных размыкающих контактов четвертой кнопочной станции, четвертого концевого
С выключателя, третьего контактора и параллельно соединенных между собой замыкающих контактов шестой кнопочной станции и первого магнитодинамического выключателя, причем силовые замыкающие контакты
5 третьего контактора включены в цепи питания второго электродвигателя натяжения ленты конвейера, а силовые замыкающие контакты четвертого контактора включены в цепи питания того же двигателя с иэменен0 ным порядком чередования фаз, при этом выход датчика скорости соединен с управляющим входом реле контроля скорости, замыкающий контакт которого включен в цепь питания катушки промежуточного реле по5 следовательно с размыкающим контактом седьмой кнопочной станции, катушка реле времени подключена к источнику питания через параллельно соединенные другие замыкающие контакты обоих магнитодинами0 ческих выключателей и восьмой кнопочной станции, при этом катушка контактора включения электродвигателя привода ковшового ротора подключена к источнику питания через цепь последовательно соеди5 ненных размыкающих контактов девятой кнопочной станции, промежуточного реле и параллельно соединенных между собой размыкающего контакта реле времени и замыкающего контакта десятой кнопочной
0 станции, катушка контактора включения электродвигателя привода конвейера подключена к источнику питания через цепь последовательно соединенных размыкающих контактов одиннадцатой кнопочной
5 станции, промежуточного реле и параллельно соединенных между собой размыкающего контакта реле времени и замыкающего контакта двенадцатой кнопочной станции, при этом в цепь питания катушки гидрораспределителя управления ходом тягача включены параллельно соединенные замыкающие контакты промежуточного реле и реле времени.
2. Устройство поп.1,отличающее- с я тем, что постоянные магниты выполнены в виде сферических сегментов, установленных с наружной и внутренней стороны ленты каждого конвейера в зеркальном отображении.
3. Устройство ло п.1,отличающее- с я тем, что вал каждого из электродвигателей натяжения ленты конвейера через редуктор и винтовой шток соединен с соответствующей стороной ведомого барабана конвейера.
I f-Wo|
8
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод роторного экскаватора | 1989 |
|
SU1710675A1 |
| Электропривод роторного экскаватора | 1988 |
|
SU1717731A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА НАТЯЖЕНИЯ ЛЕНТЫ КОНВЕЙЕРА | 1973 |
|
SU385854A1 |
| Устройство для защиты трехфазного реверсивного привода от перегрузок и неполнофазных режимов | 1986 |
|
SU1367090A1 |
| Устройство для отключения электродвигателя конвейера | 1988 |
|
SU1646959A1 |
| Устройство для запуска двигателей внутреннего сгорания транспортных средств | 1984 |
|
SU1281731A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ВИБРАТОРА | 2003 |
|
RU2239935C1 |
| Устройство для дистанционного автоматизированного управления шахтными конвейерными линиями | 1986 |
|
SU1579863A1 |
| Устройство для управления грузоподъемным механизмом | 1985 |
|
SU1384538A1 |
| Останов для ленточного конвейера | 1985 |
|
SU1265115A1 |
Изобретение относится к управлению процессом разработки грунта с .помощью шнекороторных экскаваторов-каналокопа- телей. Цель изобретения - повышение производительности и надежности работы. Устройство содержит электродвигатель (ЭД) 13 привода ковшового ротора, два ЭД 11 приводов двух ленточных конвейеров (К), катушку 57 гидрораспределителя управления ходом тягача, контакторы 34 и 35 включения ЭД 11, 13, 21 и 25. Дополнительно устр-во снабжено двумя блоками контроля и управления ленточными К. Каждый из них состоит из ЭД 21 и 25 натяжения ленты К, контакторов 36-39, кнопочных станций 40-45, 46-49, 58 и 59, датчика 26 и реле 54 контроля скорости ленты К, промежуточного реле 55, концевых выключателей (В) 50-53, реле 56 времени, магнитодинамических В 28 и 29 и постоянных магнитов 27 в виде сферических сегментов, закрепленных с шагом на ленте К. Защита от перегрузок и коротких замыканий ЭД 11, 13, 21 и 25 осуществляется при помощи автоматических В 30-33. Включение ЭД 11, 13, 21 и 25 осуществляется контакторами 34-39, которые своими замыкающими контактами 34.1-39.1 созда(Л
14
Редактор Г.Гербер
Составитель Ю.Элькин Техред М.Моргентал
28
29 15
Фиг. I
A-A
ФигЗ
Корректор А.Осауленко
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ РОТОРНОГО ЭКСКАВАТОРА | 0 |
|
SU379744A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического управления роторным экскаватором | 1976 |
|
SU619583A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
