нереверсивного счетчика 7 подключен через первый элемент И 12 к генератору 8 импульсов. Сброс нереверсивного счетчика 7 производится сигналами с датчика 6 величины подачи. При обрьше датчика 6 величины подачи нереверсивный счетчик 7 переполняется, включая
1
Изобретение относится к машиностроению, в частности к средствам автоматизации листоштамповочного и отрезного оборудования.
Цель изобретения - повышение надежности функционирования и безопасности обслуживания путем автоматической защиты при возможности нарушения
информационного канала датчика величины подачи.
Под нарушением информационного канала датчика величины подачи понимается как физический обрыв шин, по которым поступают выходные сигналы от датчика, так и проскальзывание мате- риал:ьного ролика, с которым кинематически связан ротор датчика, что особенно опасно при высоких скоростях перемещения материала и может привести к тяжелым аварийньи последствиям с травматизмом обслуживающего персонала.
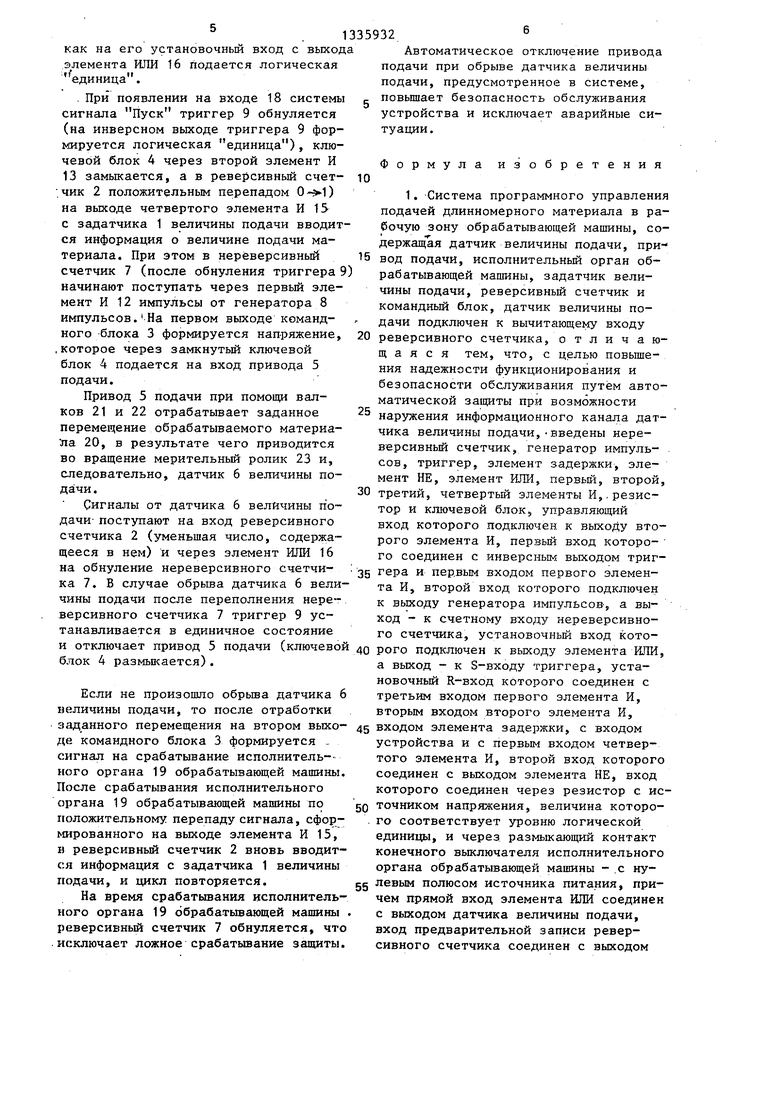
На фиг, 1 приведена функциональная схема системы; на фиг. 2 - функциональная схема командного блока; на фиг. 3 - зависимости выходных напряжений цифроаналогового преобразователя и усилителя, входящих в команд- ньй блок, в функции остатка пути отработки ДЗ; на фиг. 4 - функциональная схема ножниц; на фиг. 5 - временные диаграммы работы системы.
Система (фиг. 1) содержит задат- чик 1 величины подачи, реверсивный счетчик 2, командньш блок 3, ключевой блок А, привод 5 подачи, датчик 6 величины подачи, нереверсивный счетчик 7, генератор 8 импульсов, триггер 9, элемент 1Q задержки, элемент НЕ 11, первый 12- четвертый 15 элементы И, элемент ИЛИ 16, резистор 17, вход 18 системы. Исполнительный орган 19 (например, ножницы) обрабаты1335932
триггер 9, который отключает ключевой блок 4. Система производит автоматическое отключение привода подачи, при обрыве датчика величины подачи, что повьппает безопасность обслуживания и исключает аварийные ситуации. 1 з.п, ф-лы, 5 ил.
5
5
0
5
0
вающей машины осуществляет по команде с командного блока 3 обработку (например, резку) материала 20, подаваемого валками 21 и 22, управляемым приводом 5 подачи. Датчик 6 величины подачи работает от мерительного ролика 23 .
Командный блок 3 (фиг. 2) содержит элемент ИЛИ 24, цифроаналоговый преобразователь 25, элемент ШШ-НЕ 26, усилитель 27, диоды 28 и 28, резистор 29 и стабилитрон 30.
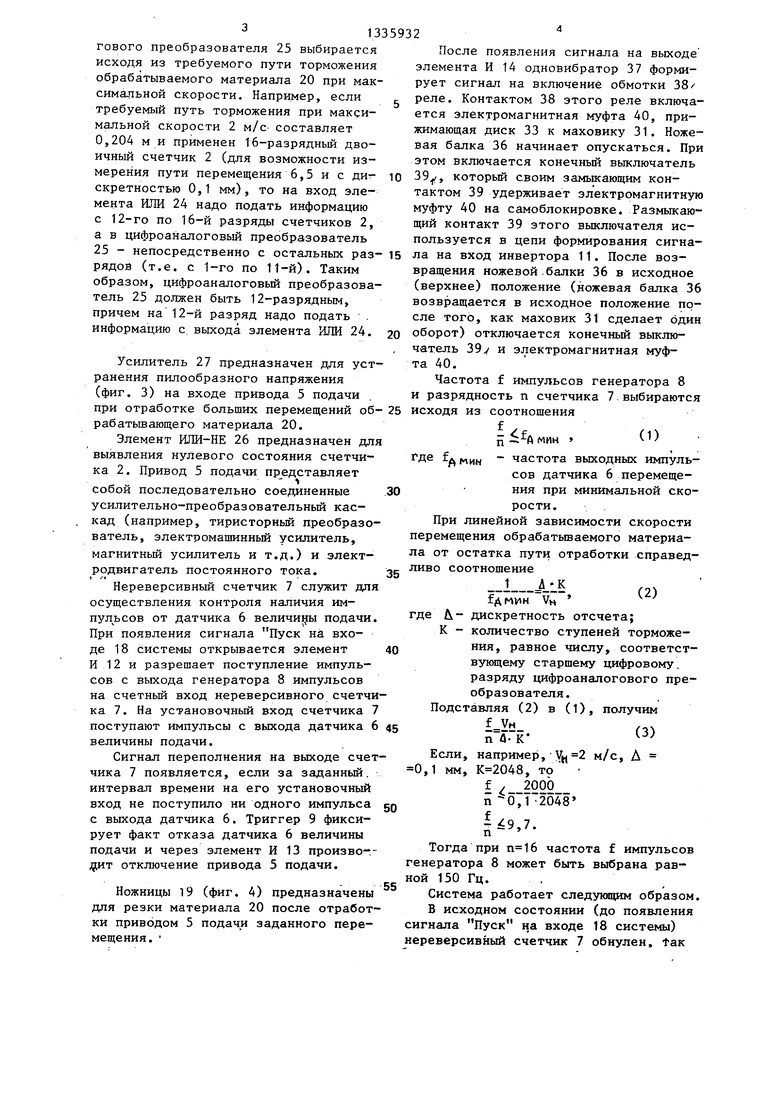
Исполнительный орган, например гильотинные ножницы (фиг.4), содержит маховик 31, постоянно вращающийся от электродвигателя 32, прижимной диск 33, шатун 34, ползун 35, с которым связана ножевая балка 36, одно- вибратор 37, реле 38, конечный вьжлю- чатель 39. и электромагнитную муфту 40.
Задатчик 1 величины подачи предназначен для задания кода величины подачи обрабатываемого материала 20 и может быть вьшолнен, например, в виде набора десятичных переключателей.
Реверсивный счетчик 2 предназначен для формирования кода рассогласования по пути Д8, определяемого выражением
Sifi,
где Зд - код заданного пути .перемещения;
S - код фактического пути перемещения .
Командный блок 3 (фиг. 2) предназначен для управления приводом 5 подачи и исполнительным органом (ножницами) 19 обрабатывающей машинь.
В качестве цифроаналогового преобразователя 25 может быть использована, например, микросхема К572ПА1А или К572ПА2А. Разрядность цифроанало- 13
гового преобразователя 25 выбирается исходя из требуемого пути торможения обрабатываемого материала 20 при максимальной скорости. Например, если требуемый путь торможения при максимальной скорости 2 м/с- составляет 0,204 ми применен 16-разрядный двоичный счетчик 2 (для возможности измерения пути перемещения 6,5 и с дит- скретностью 0,1 мм), то на вход элемента ИЛИ 24 надо подать информацию с 12-го по 16-й разряды счетчиков 2, а в цифроаналоговый преобразователь 25 - непосредственно с остальных раз- рядов (т.е. с 1-го по 11-й). Таким образом, цифроаналоговый преобразователь 25 должен быть 12-разрядным, причем на 12-й разряд надо подать . информацию с выхода элемента ИЛИ 24.
литель 27 предназначен для устя пилообразного напряжения 3) на входе привода 5 подачи работке больших перемещений об- 25 исходя из шающего материала 20.
мент ИПИ-НЕ 26 предназначен для ния нулевого состояния счетчиПривод 5
После элемента рует сигн реле. Кон ется элек жимающая вая балка этом вклю 39, кото тактом 39 муфту 40 щий конта пользуетс ла на вход вращения (верхнее) возвращае сле того, оборот) о чатель 39 та 40.
Частот и разрядн
Где f,
Л мин
подачи пpJeдcтaвляeт последовательно соединенные
30
усилительно-преобразовательный каскад (например, тиристорньш преобразователь, электромашинньй усилитель, магнитный усилитель и т.д.) и электродвигатель постоянного тока. 35
Нереверсивный счетчик 7 служит для осуществления контроля наличия им- от датчика 6 величи15Ы подачи. При появления сигнала Пуск на входе 18 системы открывается элемент 40 И 12 и разрешает поступление импульсов с выхода генератора 8 импульсов на счетный вход нереверсивного счетчика 7. На установочный вход счетчика 7 поступают импульсы с выхода датчика 6 45 величины подачи.
Сигнал переполнения на выходе счетчика 7 появляется, если за заданный, интервал времени на его установочный вход не поступило ни одного импульса 50 с выхода датчика 6. Триггер 9 фиксирует факт отказа датчика 6 величины подачи и через элемент И 13 произвог- ит отключение привода 5 подачи.
Ножницы 19 (фиг. 4) предназначены для резки материала 20 после отработки приводом 5 подачи заданного перемещения.
исходя из
После появления сигнала на выходе элемента И 14 одновибратор 37 формирует сигнал на включение обмотки 38/ реле. Контактом 38 этого реле включается электромагнитная муфта 40, прижимающая диск 33 к маховику 31. Ножевая балка 36 начинает опускаться. При этом включается конечный выключатель 39, который своим замыкающим контактом 39 удерживает электромагнитную муфту 40 на самоблокировке. Размыкающий контакт 39 этого выключателя используется в цепи формирования сигнала на вход инвертора 11. После возвращения ножевой балки 36 в исходное (верхнее) положение (ножевая балка 36 возвращается в исходйое положение после того, как маховик 31 сделает один оборот) отключается конечный выключатель 39V и электромагнитная муфта 40.
Частота f импульсов генератора 8 и разрядность п счетчика 7 выбираются соотношения
f X.
п мин
(1)
Где f,
Л мин
0
5
0 45
0
(2)
- частота выходных импульсов датчика 6 перемещения при минимальной скорости.
При линейной зависимости скорости перемещения обрабатьшаемого материала от остатка пути отработки справедливо соотношение
fд мин VH где UI- дискретность отсчета;
К - количество ступеней торможения, равное числу, соответствующему старшему цифровому, разряду цифроаналогового преобразователя.
Подставляя (2) в (1), получим п
Если, например, V 2 м/с, Д 0,1 мм, , то f 2000
2048
(3)
-L /
П -0,1 1.9.7.
50
55
Тогда при частота f импульсов генератора 8 может быть выбрана равной 150 Гц. .
Система работает следукмцим образом.
В исходном состоянии (до появления сигнала Пуск на входе 18 системы) нереверсивный счетчик 7 обнулен, tax
как на его установочный вход с выход элемента ИЛИ 16 подается логическая единица.
. При появлении на входе 18 системы сигнала Пуск триггер 9 обнуляется (на инверсном выходе триггера 9 фор- шpyeтcя логическая единица), ключевой блок 4 через второй элемент И 13 замыкается, а в реверсивный счет-
. чик 2 положительным перепадом ) на выходе четвертого элемента И 15 с задатчика 1 величины подачи вводится информация о величине подачи материала. При этом в нереверсивный счетчик 7 (после обнуления триггера начинают поступать через первый элемент И 12 импульсы от генератора 8 импульсов. На первом выходе командного блока 3 формируется напряжение,
,которое через замкнутый ключевой блок 4 подается на вход привода 5 подачи.
Привод 5 подачи при помощи валков 21 и 22 отрабатьшает заданное перемещение обрабатываемого материа- ла 20, в результате чего приводится во вращение мерительный ролик 23 и, спедовательно, датчик 6 величины подачи .
Сигналы от датчика 6 величины подачи- поступают на вход реверсивного счетчика 2 (уменьшая число, содержащееся в нем) и через элемент ИЛИ 16 на обнуление нереверсивного счетчи- ка 7. В случае обрьша датчика 6 величины подачи после переполнения нереверсивного счетчика 7 триггер 9 устанавливается в единичное состояние
1. Система программного управления подачей длинномерного материала в рабочую зону обрабатывающей машины, со- держащЪя датчик величины подачи, привод подачи, исполнительньш орган обрабатывающей машины, задатчик величины подачи, реверсивный счетчик и командный блок, датчик величины подачи подключен к вычитающему входу реверсивного счетчика, о т л и ч а ю- щ а я с я тем, что, с целью повьше- ния надежности функционирования и безопасности обслуживания путём автоматической защиты при возможности наружения информационного канала датчика величины подачи,-введены нереверсивный счетчик, генератор импульсов, триггер, элемент задержки, элемент НЕ, элемент ИЛИ, первый, второй, третий, четвертьм элементы И,.резистор и ключевой блок, управляющий вход которого подключен к выходу второго элемента И, первьш вход которого соединен с инверсным выходом триггера и первым входом первого элемента И, второй вход которого подключен к вьрсоду генератора импульсов-, а выход - к счетному входу нереверсивного счетчика, установочньй вход котои отключает привод 5 подачи (ключевой 40 рого подключен к выходу элемента ИЛИ, блок 4 размьжается) .а выход - к S-входу триггера, установочный R-вход которого соединен с третьим входом первого элемента И, вторым входом второго элемента И,
Если не произошло обрьша датчика 6 величины подачи, то после отработки
заданного перемещения на втором выхо- 45 входом элемента задержки, с входом
де командного блока 3 формируется - сигнал на срабатывание исполнитель-- ного органа 19 обрабатывающей машины. После срабатывания исполнительного органа 19 обрабатывающей машины по положительному перепаду сигнала, сформированного на выходе элемента И 15, в реверсивный счетчик 2 вновь вводится информация с задатчика 1 величины подачи, и цикл повторяется.
На время срабатьтания исполнительного органа 19 обрабатывающей машины . реверсивньй счетчик 7 обнуляется, что исключает ложное срабатывание защиты.
устройства и с первым входом четвер того элемента И, второй вход которо соединен с выходом элемента НЕ, вхо которого соединен через резистор с 50 точником напряжения, величина котор . го соответствует уровню логической единицы, и через размыкающий контак конечного выключателя исполнительно органа обрабатывающей машины - .с ну левым полюсом источника питания, пр чем прямой вход элемента ИЛИ соедин с выходом датчика величины подачи, вход предварительной записи реверсивного счетчика соединен с выходом
55
5
0
5
0
5
Автоматическое отключение привода подачи при обрыве датчика величины подачи, предусмотренное в системе, повьппает безопасность обслуживания устройства и исключает аварийные ситуации.
Формула изобретения
1. Система программного управления подачей длинномерного материала в рабочую зону обрабатывающей машины, со- держащЪя датчик величины подачи, привод подачи, исполнительньш орган обрабатывающей машины, задатчик величины подачи, реверсивный счетчик и командный блок, датчик величины подачи подключен к вычитающему входу реверсивного счетчика, о т л и ч а ю- щ а я с я тем, что, с целью повьше- ния надежности функционирования и безопасности обслуживания путём автоматической защиты при возможности наружения информационного канала датчика величины подачи,-введены нереверсивный счетчик, генератор импульсов, триггер, элемент задержки, элемент НЕ, элемент ИЛИ, первый, второй, третий, четвертьм элементы И,.резистор и ключевой блок, управляющий вход которого подключен к выходу второго элемента И, первьш вход которого соединен с инверсным выходом триггера и первым входом первого элемента И, второй вход которого подключен к вьрсоду генератора импульсов-, а выход - к счетному входу нереверсивного счетчика, установочньй вход кото0 рого подключен к выходу элемента ИЛИ, а выход - к S-входу триггера, устаустройства и с первым входом четвертого элемента И, второй вход которого соединен с выходом элемента НЕ, вход которого соединен через резистор с ис- 0 точником напряжения, величина которо- . го соответствует уровню логической единицы, и через размыкающий контакт конечного выключателя исполнительного органа обрабатывающей машины - .с нулевым полюсом источника питания, причем прямой вход элемента ИЛИ соединен с выходом датчика величины подачи, вход предварительной записи реверсивного счетчика соединен с выходом
5
четвертого элемента И и с инверсным входом элемента ИЛИ, информационные входы реверсивного счетчика подключены к. выходам задатчика величины подачи, выходы старших и младших разрядов реверсивного счетчика подключены к информационным входам старших и младших разрядов командного блока, вход ключевого блока соединен с первым вы- ходом командного блока, а выход - с входом привода подаЧи, второй выход командного блока подключен к первому входу третьего элемента И, второй вход которого соединен с выходом эле- мента задержки, а выход - с входом исполнительного органа обрабатьшающей машины.
2. Система по п . 1, о т л и ч а ю- щ а я с я тем, что командный блок содержит цифроаналоговьй преобразователь, усилитель, элементы ИЛИ и ИЛИНЕ, два диода, резистор и стабили- трон, входы элемента ИЛИ соединены с информационными входами старших разрядов блока, а выход - со старшим цифровым входом цифроаналогового преобразователя, младшие цифровые входы которого Соединены с информационными входами мпадших разрядов блока, выход цифроаналогового преобразователя соединен с инвертирующим входом усилителя и через включенные встречно- параллельно диоды - с нулевым полюсом источника питания, инвертирующий вход усилителя подключен через параллельно включенные стабилитрон и резистор к выходу усилителя и к первому выходу блока, неинвертирующий вход усилителя соединен с нулевым полюсом источника питания, входы элемента Ш1И-НЕ подключены к информационным входам блока, выход элемента ШШ-НЕ является вторым выходом блока.
ГЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления перемещением сматываемого с рулона длинномерного материала | 1987 |
|
SU1505623A2 |
| Устройство управления перемещением сматываемого с рулона длинномерного материала | 1986 |
|
SU1345171A1 |
| Устройство управления перемещением сматываемого с рулона длинномерного материала | 1987 |
|
SU1462252A1 |
| Система программного управления подачей длинномерного материала в рабочую зону обрабатывающей машины | 1981 |
|
SU1009578A2 |
| Устройство для автоматическогоРАСпРЕдЕлЕНия ТРуб пО пОТОчНыМ лиНияМиХ ОТдЕлКи | 1979 |
|
SU806186A1 |
| Устройство для управления технологическим объектом | 1985 |
|
SU1275377A1 |
| Автоматический регулятор возбуждения для синхронной машины | 1987 |
|
SU1471279A1 |
| Цифровой регулятор перемещения длинномерного материала в рабочую зону обрабатывающей машины | 1985 |
|
SU1274821A1 |
| Программная следящая система | 1981 |
|
SU1108394A1 |
| Устройство для регулирования расхода | 1986 |
|
SU1377832A1 |

Изобретение относится к области машиностроения, в частности к средствам автоматизации листоштамповочного и отрезного оборудования. Целью изобретения является повьшение надежности функционирования и безопасности обслуживания путем, автоматической защиты при возможности нарушения информационного канала датчика величины подачи. IВ состав системы вх9дят последовательно соединенные задат- чик 1 величины подачи, реверсивный счетчик 2 и командный блок 3, а также привод 5 подачи, датчик 6 величины подачи, подключенный к счетному входу реверсивного счетчика 2, кгаоче- вой блок 4, включенный, между командным блоком 3 и приводом 5 подачи, нереверсивный счетчик 7, генератор 8 импульсов, триггер 9, элемент 10 задержки, элемент НЕ 11, первый 12 - четвертый 15 элементы И, элемент ИЛИ 16 и резистор 17. Счетный вход (Л со 00 сд со со ND
a,20te Q,W96 ЦВ192 oгf ггвв 1.пуб л$()
.3
л(}
| Система программного управления подачей длинномерного материала в рабочую зону обрабатывающей машины | 1981 |
|
SU1009578A2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| СИСТЕМА ПОЗИЦИОННОГО ПРОГРАММНОГО УПРАВЛЕНИЯ СТАНКАМИ | 0 |
|
SU378809A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
