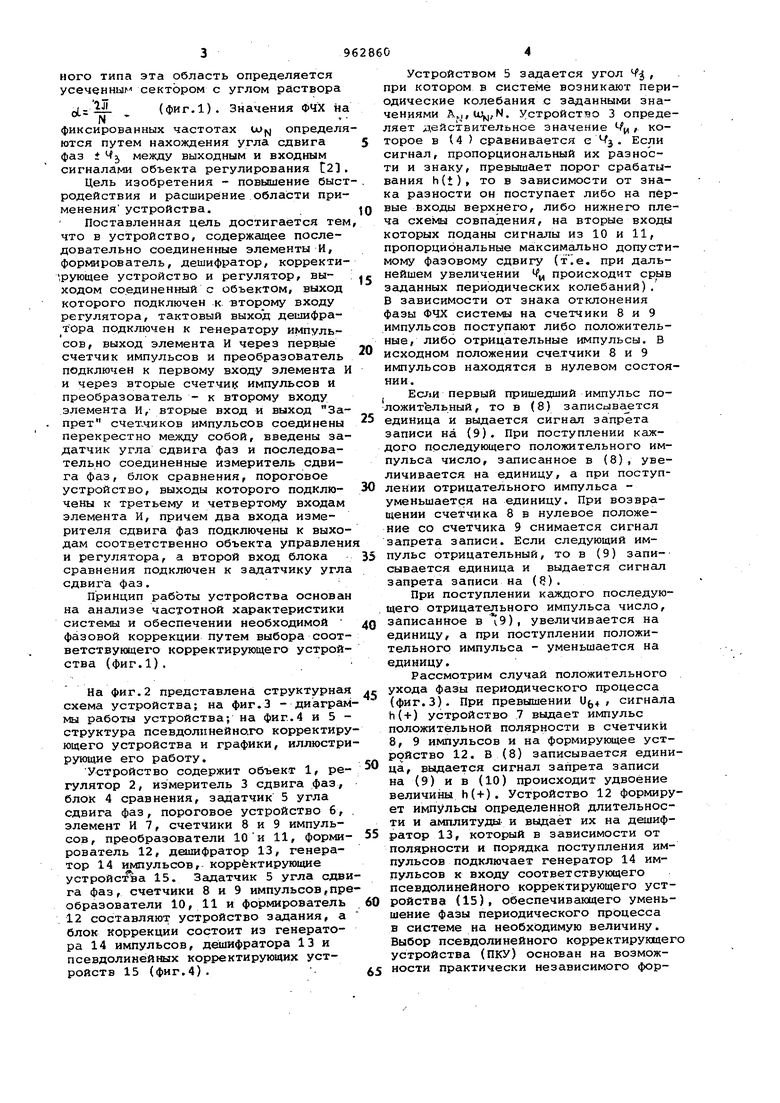
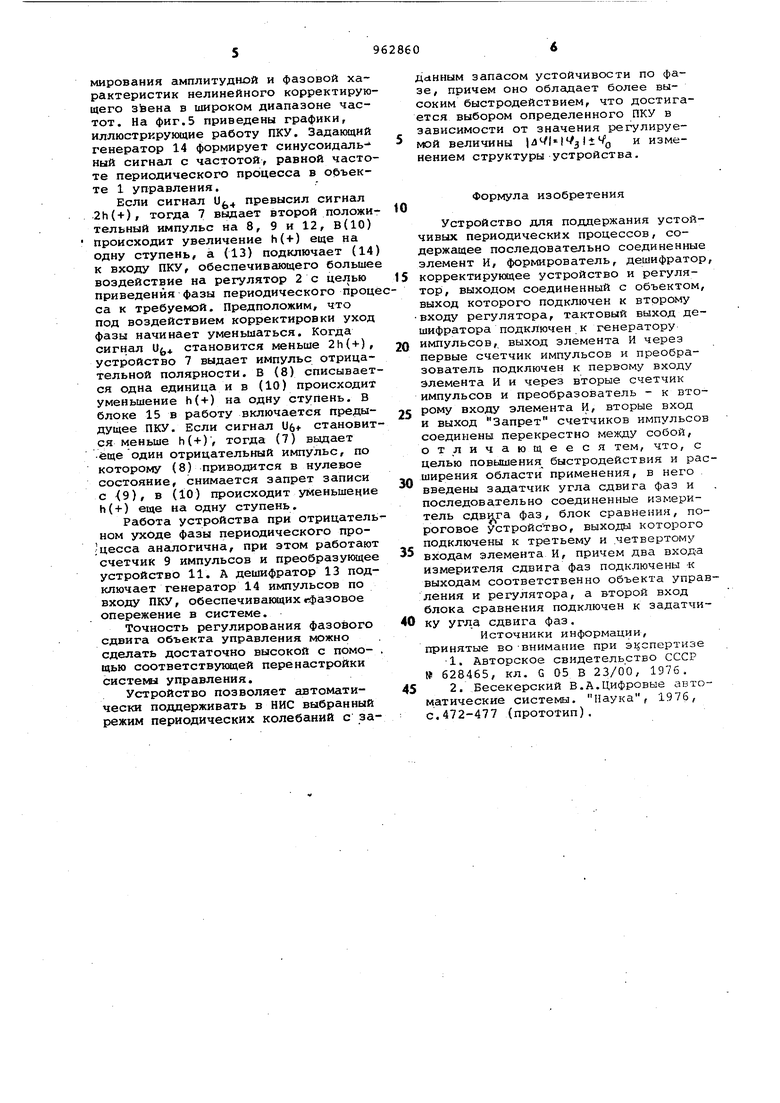
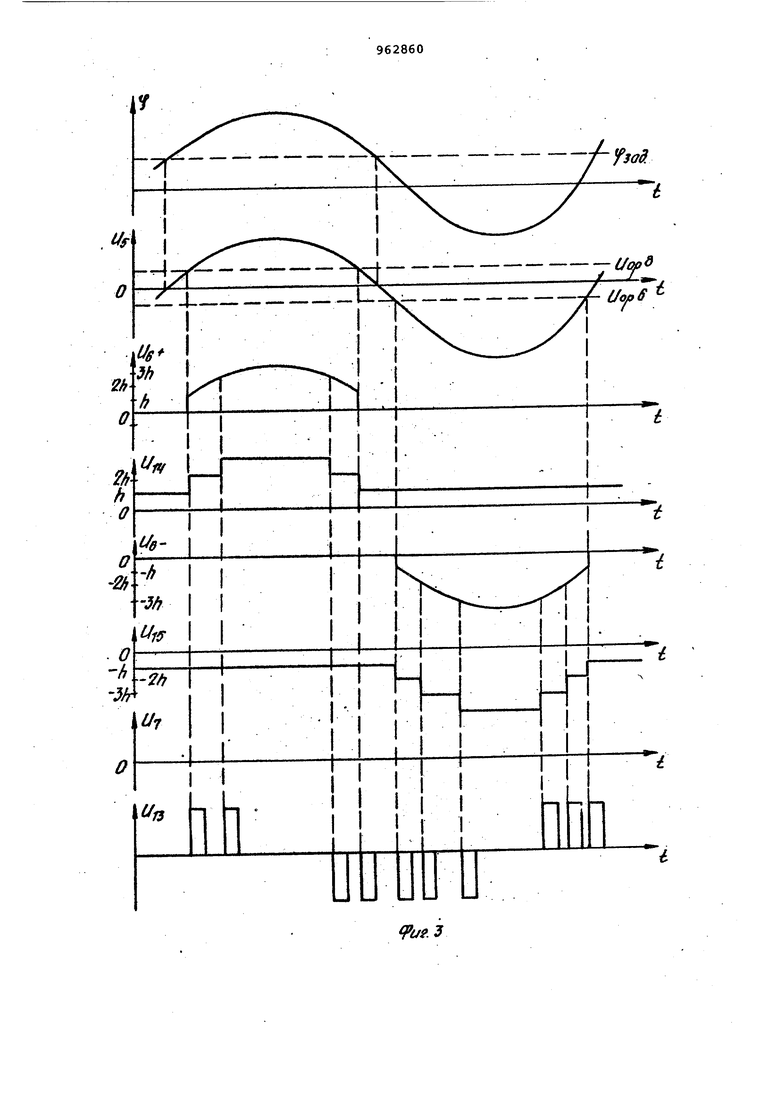
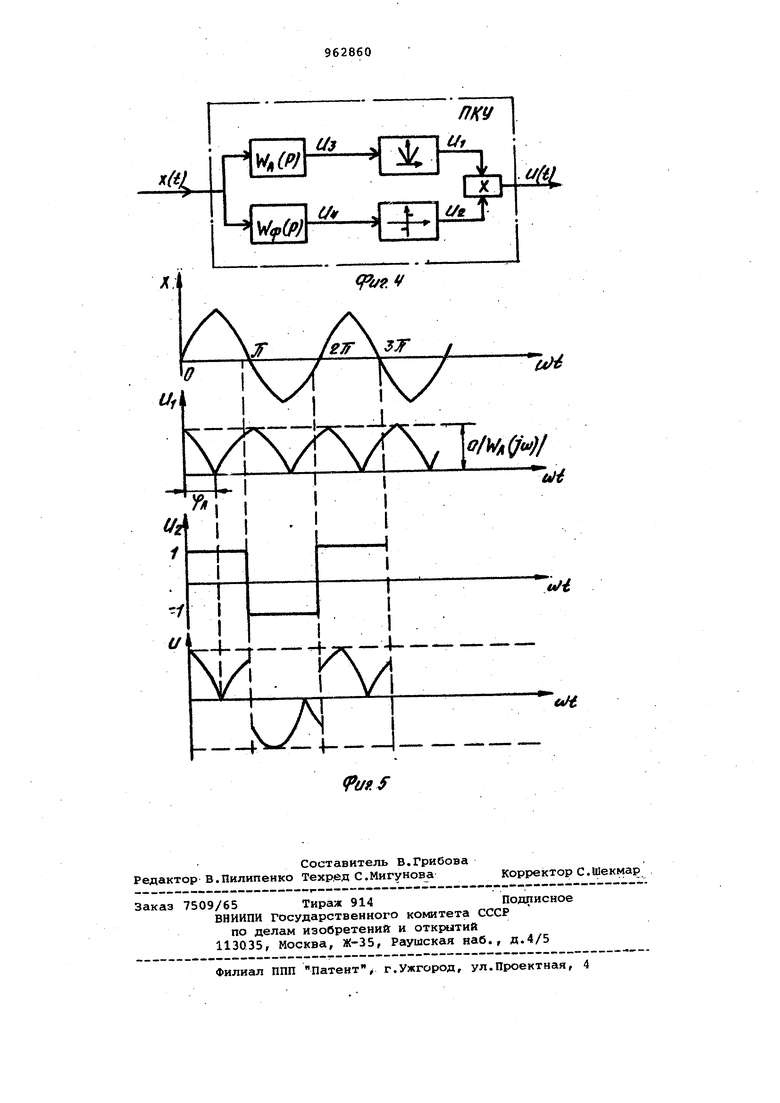
Изобретение относится к aBTOMaTH ческому управлению техническими объ актами, основным рабочим режимом которых является режим периодических колебаний. Известно, что наличие периодических колебаний относительно высокой частоты по сравнению с изменением уп равляющего воздействия линеаризует характеристику нелинейного-элемента (НЭ) и среднее значение выходной величины становится пропорционгшьным медленно меняющемуся входному сигналу. При этом даже сложные нелинейнос ти (гистерезис и зона нечувствительности) Не оказывают влияния на среднее значение выходной величины. Особенно важно это для систем, к которым предъявляются жесткие требования по точности регулирования. Периодические процессы должны иметь здесь достаточно высокую часто и малую амплитуду. Однако вариации параметров наличие внешних возмущений могут вывести систему из заданного режима периодических колебаний. возникает необходимость в созданий устройства, которое поддерживало бы заданный режим периодических колебаний, и в то же время им ло достаточно простую аппаратную реализацию .. Однако известное устройство для вывода системы управления из режима автоколебаний обладает невысоким быстродействием, так как требуется последовательный перебор корректирующих программ с момента возникновения автоколебаний до их прекращения, имеет сложную аппаратурную реализацию и рассматривается применительно к нелинейным непрерывным системам. Одной из особенностей периодических процессов в нелинейных импульсных автоматических системах (НИАС) является то/ что частоты возможных колебаний и){ц находятся в целочисленном отношении с частотой квантования Wg. Известно устройство, где периодические процессы возможны, если фазочастотная характеристика (ФЧХ) систе- IJI мы на .фиксированных частотах,1и)ц --(где ы гШмТд - относительная частота колебаний; N - относительный период колебания; Тд - период дискретности системы) будет заходить в область возможных значений коэффициента гармонической линеаризации S (а , ,. N). Например, для нелинейности релейиого типа эта область определяется усеченным сектором с углом раствора (фиг,1). Значения ФЧХ на - N фиксированных частотах U)|yj определя ются путем нахождения угла сдвига фаз 4j между выходным и входным сигналами объекта регулирования 21 Цель изобретения - повышение быст родействия и расширение области применения устройства. Поставленная цель достигается тем что в устройство, содержащее последовательно соединенные элементы И, формирователь, дешифратор, корректи.рующее устройство и регулятор, выходом соединенный с объектом, выход которого подключен к. второму входу регулятора, тактовый выход дешифра тора подключен к генератору импуль сов, выход элемента И через первые счетчик импульсов и преобразователь подключен к первому входу элемента И и через вторые счетчи($ импульсов и преобразователь - к второму входу элемента И,- вторые вход и выход Запрет счет.чиков импульсов соеданены перекрестно между собой, введены задатчик угла сдвига фаз и последовательно соединенные измеритель сдвига фаз, блок сравнения, пороговое устройство, выходы которого подключены к третьему и четвертому входам элемента И, причем два входа измерителя сдвига фаз подключены к выходам соответственно объекта управлени и регулятора, а второй вход блока сравнения подключен к задатчику угла сдвига фаз. Принцип работы устройства основан на анализе частотной характеристики системы и обеспечении необходимой фазовой коррекции путем выбора соответствующего корректирующего устройства (фиг.1). На фиг.2 представлена структурная схема устройства; на фиг.З - диаграм мы работы устройства; на фиг.4 и 5 структура псевдолпнейно.го корректиру ющего устройства и графики, иллюстри рующие его работу, Устройство содержит объект 1, регулятор 2, измеритель 3 сдвига фаз, блок 4 сравнения, задатчик 5 угла сдвига фаз, пороговое устройство 6, элемент И 7, счетчики 8 и 9 импульсов, преобразователи 10и 11, формирователь 12, дешифратор 13, генератор 14 импульсов, корректирующие устройства 15. Задатчик 5 угла сдви га фаз, счетчики 8 и 9 импульсов,пре образователи 10, 11 и формирователь 12 составляют устройство задания, а блок коррекции состоит из генератора 14 импульсов, дешифратора 13 и псевдолинейных корректирующих устройств 15 (фиг.4), Устройством 5 задается угол , при котором в системе возникгиот периодические колебания с заданными значениями Аи,и;,М. Устройство 3 определяет действительное значение /j,, которое в 14 ) сравнивается с V. Если сигнал, пропорциональный их разности и знаку, превышает порог срабатывания h(t)f то в зависимости от знака разности он поступает либо на первые входы верхнего, либо нижнего плеча схемы совпадения, на вторые входы которых поданы сигналы из 10 и 11, пропорциональные ма ксимально допустимому фазовому сдвигу (т1е. при дальнейшем увеличении происходит срыв заданных периодических колебаний) , В зависимости от знака отклонения фазы ФЧХ системы на счетчики 8 я 9 импульсов поступают либо положительные, либо отрицательные импульсы. В исходном положении счетчики 8 и 9 импульсов Нс1ходятся в нулевом состоянии. Ес/ш первый пришедший импульс положительный , то в (8) записывается единица и выдается сигнал запрета записи на (9). При поступлении каждого последующего положительного импульса число, записанное в (8), увеличивается на единицу, а при поступлении отрицательного импульса уменьшается на единицу. При возвращении счетчика 8 в нулевое положение со счетчика 9 снимается сигнал запрета записи. Если следующий импульс отрицательный, то в (9) записывается единица и выдается сигнал запрета записи на (). При поступлении каждого последующего отрицательного импульса число, записанное в 9), увеличивается на единицу, а при поступлении положительного импульса - уменьшается на единицу. Рассмотрим случай положительного ухода фазы периодического процесса (фиг.З). При превышении U(,4 , сигнала h( + ) устройство .7 выдает импульс положительной полярности в счетчики 8, 9 импульсов и на формирукмцее устройство 12. В (8) записывается единица, выдается сигнал запрета записи на (9) и в (10) происходит удвоение величины h(+). Устройство 12 формирует импульсы определенной длительности и амплитуды- и выдаёт их на дешифратор 13, который в зависимости от полярности и порядка поступления импульсов подключает генератор 14 импульсов к входу соответствующего псевдолинейного корректирующего устройства (15), обеспечивающего уменьшение фазы периодического процесса в системе на необходимую величину. Выбор псевдолинейного корректирующего устройства (ПКУ) основан на возможности практически независимого формирования амплитудной и фазовой характеристик нелинейного корректирующего зЬена в широком диапазоне частот. На фиг.5 приведены графики, иллюстрирующие работу ПКУ. Задающий генератор 14 формирует синусоидальный сигнал с частотой, равной частоте периодического процесса в о&ъекте 1 управления.
Если сигнал и превысил сигнал 2h(+), тогда 7 выдает второй положи- tO тельный импульс на 8, 9 и 12, В(10) происходит увеличение h{+) еще на одну ступень, а (13) подключает (14) к входу ПКУ, обеспечивающего большее воздействие на регулятор 2с целью 15 приведения фазы периодического процесса к требуемой. Предположим, что под воздействием корректировки уход фазы начинает уменьшаться. Когда сигнал Uj, становится меньше 2h(), jQ устройство 7 выдает импульс отрицательной полярности. В (8) списывается одна единица и в (10) происходит уменьшение h(+) на одну ступень. В блоке 15 в работу включается преды- 25 дущее ПКУ. Если сигнал Ufet становится меньше h( + ), тогда (7) выдает еще один отрицательный импульс, по которому (8) приводится в нулевое состояние, снимается запрет записи --. с 9), в (10) происходит уменьшение h(+) еще на одну ступень.
Работа устройства при отрицательном уходе фазы периодического про;-цесса аналогична, при этом работают счетчик 9 импульсов и преобразующее 35 устройство 11. А дешифратор 13 подключает генератор 14 импульсов по входу ПКУ, обеспечивакицих«фазовое опережение в системе.
Точность регулирования фазового 40 сдвига объекта управления можно сделать достаточно высокой с помо- . щью соответствующей перенастройки систе11«и управления.
Устройство позволяет автомати- 45 чески поддерживать в НИС выбранный режим периодических колебаний с заданным запасом устойчивости по фазе, причем оно обладает более высоким быстродействием, что достигается выбором определенного ПКУ в зависимости от значения регулируемой величины |л 11/з изменением структуры устройства.
Формула изобретения
Устройство для поддержания устойчивых периодических процессов, содержащее последовательно соединенные элемент И, формирователь, дешифратор корректирующее устройство и регулятор, выходом соединенный с объектом, выход которого подключен к второму входу регулятора, тактовый выход дешифратора подключен к генератору импульсов, выход элемента И через первые счетчик импульсов и преобразователь подключен к первому входу элемента И и через вторые счетчик импульсов и преобразователь - к второму входу элемента И, вторые вход и выход Запрет счетчиков импульсов соединены перекрестно между собой, отличающееся тем, что, с целью повышения быстродействия и расширения области применения, в него введены задатчик угла сдвига фаз и последовательно соединенные измеритель сдвига фаз, блок сравнения, пороговое устройство, выхода которого подключены к третьему и четвертому входам элемента И, причем два входа измерителя сдвига фаз подключены -к выходам соответственно объекта управления и регулятора, а второй вход блока сравнения подключен к задатчику угла сдвига фаз.
Источники информации, принятые во -внимание при Э1 спертнзе
1. Авторское свидетельство СССР № 628465, кл. G 05 В 23/оо, 1976.
2. Бесекерский В.А.Цифровые автоматические системы. Наука, 1976, с. 472-477 (прототип).
W
t/f.f
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |
| Устройство для настройки систем автоматического регулирования | 1978 |
|
SU951242A1 |
| Устройство для фильтрации высокочастотных отклонений натяжения полосы на прокатном стане | 1981 |
|
SU973204A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1990 |
|
SU1707723A1 |
| Система регулирования горения топлива в проходной нагревательной печи | 1983 |
|
SU1149107A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2293962C1 |
| Устройство для контроля фазочастотных характеристик четырехполюсников | 1989 |
|
SU1758600A1 |
| Многоканальный широтно-импульсный регулятор температуры (его варианты) | 1981 |
|
SU962883A1 |
| Устройство для голосования | 1980 |
|
SU928383A1 |
| Устройство для фильтрации сигнала толщины и натяжения полосы на прокатном стане | 1982 |
|
SU1024133A1 |
1)
12
H
uf. 3
-S--t--r -f: r -. А/
и
-
л/
w
