(54) СЕРВОПРИВОД С ЦИФРОВЬМ УПРАВЛЕНИЕМ



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для приведения @ -кодов Фибоначчи к минимальной форме | 1982 |
|
SU1092489A1 |
| Устройство для контроля исправности исполнительного органа | 1986 |
|
SU1318993A1 |
| Цифро-аналоговый преобразователь | 1977 |
|
SU809540A1 |
| Цифро-аналоговый преобразователь | 1977 |
|
SU809541A1 |
| Счетчик импульсов | 1988 |
|
SU1647889A1 |
| Сумматор кодов фибоначчи | 1976 |
|
SU732864A1 |
| Устройство для приведения р-кодов фибоначчи к минимальной форме | 1976 |
|
SU662930A1 |
| Устройство для преобразования формы кода Фибоначчи | 1987 |
|
SU1418910A1 |
| Устройство для приведения р-кодов Фибоначчи к минимальной форме | 1982 |
|
SU1019434A1 |
| Устройство для развертки @ -кодов Фибоначчи | 1983 |
|
SU1141396A1 |

Изобретение относится к следящим системам с непосредственным управле- , нием от цифровой вычислительной маитны (ЦВМ) и может быть использовано в системах управления летательных аппаратов, промышленных роботов, стан.ков с цифровым программным управлением и- др.
Известен гидравлический сервбпривод с цифровым управлением, содержащий различные модификации таких сервоприводов, в частности сервопривод , со- средним положением, у которого количество управляющих устройств и поршней по меньшей мере в два раза превышает количество разрядов управляннцего кода, причем одна половина из таких управляющих устройств и поршней служит для отработки поло}жительных перемещений относительно среднего положения, а другая - отрицательных. По сути, сервопривод со средним положением может рассматриваться как двукратно резервированный сервопривод без среднего положения l.
Недостатками таких сервоприводов I являются невозможность диагностики и контроля и потеря номинальных характеристик при отказе хотя бы одного управляющего устройства.
Одно из достоинств сервопривода с цифровым управлением - отсутствие. обратной связи по положению штока, но с точки зрения контроля это недостаток.
Введение в сервопривод с цифровым управлением прецизионного дат10чика положения выходного штока для контроля и диагностики существенно снижает надежность и устойчивость сервопривода к условиям внетпней среды.
15
Наиболее близким к предлагаемому является сервопривод с цифровым управлением без среднего положения, который состоит из заглушек, выходного штока, с которым связан один
Рабочая площадь, образованная
25 поперечной поверхностью поршня, связанного со штоком, равна половине сечения цилиндра, а камера, образованная соответствующей заглушкой иэтим поршнем, постоянно соединена
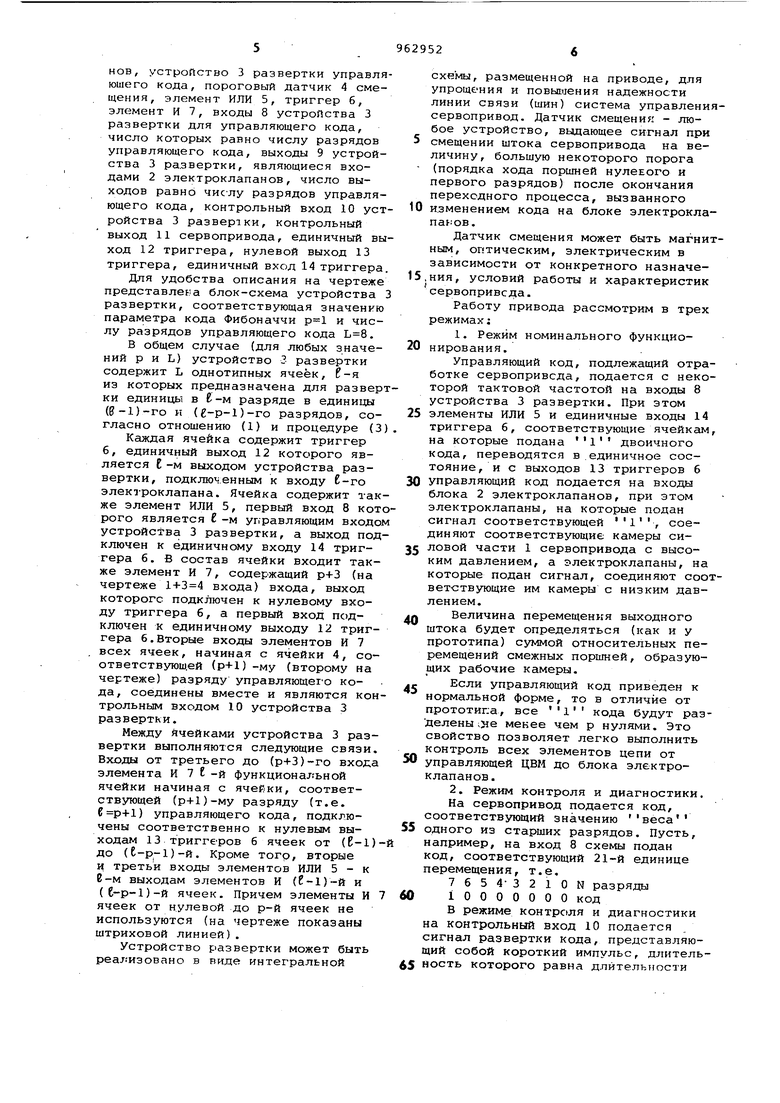
30 с источником высокого давления. обеспечивая таким образом усилие для перемещения штока по направлени в цилиндр. Рабочие камеры, образованные смежными поршнями, соединяются через электроклапаны с источ ком высокого или низкого давления. Длина ограничителей выбрана так, чт величины относительного хода поршней образуют ряд 1,2,4,8,2 ,,2, где N - полное число управляющих устройств. .Кроме вышеописанных рабочих каме сервопривод имеет две камеры, одна из которых постоянно соединена с ис точником высокого давления, другая низкого. Назначение этих камер - де фирование ударных нагрузок, возникающих в переходных процессах. Необходимое количество рабочих камер определяется исходя из-требуемой точности. У прототипа восемь рабочих камер, что обеспечивает точ ность позиционирования 1/2 1/256 рабочего диа;пазона. Суммарная величина относительног смещения демпфирующих поршней прототипа - 25% рабочего диапазрна 2 Недостатками известных сервоприводов являются невозможность определить наличие и место таких неисправностей, как ошибка относительного перемещения смежных поршней вследствие износа, деформации и заклинивания, отказ эл ктроклапана, невозможность контроля в процессе функционирования сервопривода, отклонение от рабочих характеристик п единичном отказе в сервоприводах, к которым предъявляются высокие тре бования по надежности. Цель изобретения - улучшение диа ностирования сервопривода с цифровым управлением. Указанная цель достигается тем, что в сервопривод с цифровым управлением, содержащий блок электроклапанов , подключенный к силовой части привода, введены устройство развертки р-кода Фибоначчи и датчик смещения, подключенный к выходу при вода, причем выходы устройства развертки р-кода Фибоначчи подключены к соответствующим входам блока элек т оклапанов, а входы являются входа устройства, выход датчика смещения является контрольным выходом устрой ства. Устройство развертки р-кода соде жит 6 функциональных ячеек, состоящих из элементов ИЛИ, И и триггера причем единичный выход триггера сое динен с первым входом элемента И и является одним из выходов устройства развертки р-кода Фибоначчи, входами которого являются первые входы элементов ИЛИ, выход элемента ИЛИ соединен с входом триггера, нулевой выход которого соединен с (р+3)-входом элемента И, вторые входы элементов И всех функциональных ячеек, начиная с (р+1)-й ячейки, соединены между собой и являются контрольным входом устройства развертки р-кода Фибоначчи, входы от 3 до (р+3)-го элемента И функциональной ячейки начин,ая с (р+1)-й ячейки подключены соответственно к нулевым выходам триггеров ячеек от (С-1) до (Б-р-1), вторые и третьи входы элемента ИЛИ подключены к выходам элементов И (6-И) и (6+р+1)-й ячеек. Входом датчика смещения является смещение штока относительно цилиндра, выход датчика смещения является контрольно-диагностическим, устройство развертки имеет, кроме входов для управляющего кода, контрольный вход для осуществления процедур развертки кода, длины ограничителей хода поршней выбираются так, чтобы отйосйтельные перемещения смежных поршней были пропорциональны сам известного двоичного р-кода Фибоначчи, а управляющий код, подаваемый на устройство развертки крда, является двоичным р-кодом Фибоначчи, веса разрядов которого задаются следующей рекуррентной формулой : 0при 6 О 1при t 0(1) fpCe-D+ppCe-p-i) приело, где р - заданное натуральное ЧИСЛО; t - номер разряда двоичного р-кода Фибоначчи; ) вес разряда р-кода J Фибоначчи. Под р-кодом Фибоначчи натурального числа N понимается его представление в Еиде N хае% (f)(2) i-o Рекуррентная формула (2) порождает при различных р следующие ряды чисел:12345 б 7 8 9 10 11 1 2 3 5 8 13 21 34 55 89 21 1 1 2 3 4 б 9 13 19 28 31111234571014 1111111111 -двоичная цифра - значение кода в 6-м разряде ; -число двоичных разрядов р-к ода Фибон аччи; %(К) вес Р-го разряда р-крда Фибоначчи. На чертеже показана функциональная схема устройства. На схеме обозначены силовая часть 1 сервопривода, блок 2 электроклапанов, устройство 3 развертки управляющего кода, пороговый датчик 4 смещения, элемент ИЛИ 5, триггер 6, элемент И 7, входы 8 устройства 3 развертки для управляющего кода, число которых равно числу разрядов управляющего кода, выходы 9 устройства 3 развертки, являющиеся входами 2 электроклапанов, число выходов равно числу разрядов управляющего кода, контрольный вход 10 устройства 3 развертки, контрольный выход 11 сервопривода, единичный выход 12 триггера, нулевой выход 13 триггера, единичный вход 14 триггера.
Для удобства описания на чертеже представлена блок-схема устройства 3 развертки, соответствующая значению параметра кода Фибоначчи и числу разрядов управляющего кода .
В общем случае (для любых значений р и L) устройство 3 развертки содержит L однотипнь1х ячеек, f-я из которых предназначена для развертки единицы в t-M разряде в единицы (0-1)-го и (e-p-l)-ro разрядов, согласно отношению (1) и процедуре (3)
Каждая ячейка содержит триггер б, единичный выход 12 которого является -м выходом устройства развертки, подключенным к входу 6-го электроклапана. Ячейка содержит также элемент ИЛИ 5, первый вход 8 которого является i -м управляющим входом устройства 3 развертки, а выход подключен к единичному входу 14 триггера 6. В состав ячейки входит также элемент И 7, содержащий р+3 (на чертеже входа) входа, выход которого подключен к нулевому входу триггера б, а первый вход подключен к единичному выходу 12 триггера 6.Вторые входы элементов И 7 всех ячеек, начиная с ячейки 4, соответствующ.ей (р+1) -му (второму на чертеже) разряду управляющего кода, соединены вместе и являются контрольным входом 10 устройства 3 развертки.
Между ячейками устройства 3 развертки выполняются следующие связи. Входы от третьего до (р+3)-го входа элемента И 7 f-и функциональной ячейки начиная с ячейки, соответствующей (р+1)-му разряду (т.е. ) управляющего кода, подключены соответственно к нулевым выходам 13 триггеров 6 ячеек от (6-1)до (6-р-1)-й. Кроме тогр, вторые JJ третьи входы элементов ИЛИ 5 - к В-м выходам элементов И (6-1)-и и (6-р-1)-й ячеек. Причем элементы И ячеек от нулевой до р-й ячеек не используются (на чертеже показаны штриховой линией).
Устройство развертки может быть реализовано в виде интегральной
схемы, размещенной на приводе, для упрощения и повы1т1ения надежности линии связи (шин) система управлениясервопривод. Датчик смещения - любое устройство, выдающее сигнал при смещении штока сервопривода на величину, большую некоторого порога (порядка хода поршней нулевого и первого разрядов) после окончания переходного процесса, вызванного изменением кода на блоке электроклапа юв.
Датчик смещения может быть магнитным, оптическим, электрическим в зависимости от конкретного назначения, условий работы и характеристик сервопривсд;а.
Работу привода рассмотрим в трех режимах;
Управляющий код, подлежащий отработке сервопривода, подается с некоторой тактовой частотой на входы 8 устройства 3 развертки. При этом элементы ИЛИ 5 и единичные входы 14 триггера 6, соответствующие ячейкам, на которые подана i двоичного кода, переводятся в единичное состояние, и с выходов 13 триггеров б управляющий код подается на входы блока 2 электроклапанов, при этом электроклапаны, на которые подан сигнал соответствующей , соединяют соответствующие камеры силовой части 1 сервопривода с высоким давлением, а электроклапаны, на которые подан сигнал, соединяют соответ-ствующие им камеры с низким давлением.
Величина перемещения выходного штока будет определяться (как и у прототипа) суммой относительных перемещений смежных поршней, образующих рабочие камеры.
Если управляющий код приведен к нормальной форме, то в отличие от прототипа, все i кода будут разделены ;jie менее чем р нулями. Это свойство позволяет легко выполнить контроль всех элементов цепи от управляющей ЦВМ до блока электроклапанов.
соответствующий значению веса одного из старших разрядов. Пусть, например, на вход 8 схемы подан код, соответствующий 21-й единице перемещения, т.е.
76543210Ы разряды 10000000 код
В режиме контроля и диагностики на контрольный вход Ю подается сигнал развертки кода, представляющий собой короткий импульс, длительность которого равна длительности
переходного процесса в элементах И 7. Этот импульс приводит к появлению единичного сигнала на выходе элемента И 7 ячейки старшего седьмого разряда, в котором записана кода 1.000.0000, что приводит к перебросу триггера 6 ячейки старшего разряда в нулевое состояние, .а элемент ИЛИ 5 ячеек двух предьйущих разрядов это приводит к перебросу триггеров б ячеек двух предыдущих разрядов в единичное состояние, т.е.
76543210 разряд 1 g Q 00000 код
01100000
Если привод исправен, т.е. длины ограничителей хода находятся в пределах допусков, а электроклапаны срабатывают должным образом, тогда после окончания переходных процессов смещение выходного штока в результате развертки кода не должно превосходить установленный допуск, поскольку
1000000 21
0110000 0л/ Величина смещения штока фиксируется пороговым датчиком 4 смещения, с выхода 11 которого снимается сигнал о состоянии (исправленности или неисправности) сервопривода. Поскольку в первом такте операции контроля и диагностики участвуют только три электроклапана и рабочие камеры, соответствующие седьмым, шестым и пятым разрядам, то возможная неисправность блока 2 электроклапанов и силовой части 1 может быть локализована с точностью до трех разрядов.
После первого импульса операции контроля и диагностики на первом, третьем и четвертом входах элемента И 7 пятого разряда устройства 3 развертки появятся разрешающие потенциалы. После подачи на вход 10 устройства 3 развертки второго импульса с выхода устройства 3 развертки на вход блока 2 электроклапанов будет подан код.
7-654321N разряда
О 1 Q О О О код
010110 0-1,3+5+3 21
Аналогично, после подачи третьего импульса на вход 10 на вход блока 2 эл1 ктроклапамов будет подан код
76543210N О 1 01 Q р О код 0101 О 11 O/.l 34-5+2+1 21
При этом после каждого импульса j контроля с выхода датчика 4 снимаются сигналы сос.тояния (Испрабен , Неисправеи) сервопривода.
8процессе развертки кода, соответствующего самому старшему разряду, последовательно изменяют состояние О на 1, затем
на О электроклапаны и рабочие камеры всех разрядов. Отсутствие сигналов датчика смещения Неисправен на всех тактах операции контроля-признак ирправности сервопривода. В
режимах контроля и диагностики могут быть выявлены такие неисправности сервопривода, как полный или частичный (потеря быстродействия и т.д.), недоступный износ, деформадия, заклинивание, разрушение ограничителей хода поршней. Место неисправности локализуется с точностью до трех разрядов.
При обнаружении неисправного разряда существует принципиальная возможность в режиме отработки требуемых кодов производить их развертку так, чтобы эквивалентный код в неисправном разряде имел требуемое значение (IO или ).
Дополнительные преимущества предлагаемого сервопривода.
Если длительность переходного процесса в приводе значительно меньше периода подачи управляющих кодов, то может выполняться развертывание тёкущего значения управляющегокода в эквивалентные до момента подачи следующего значения управляющего кода; таким образом, существует возможность выполнения контроля и диагности непосредственно в процессе работы сервопривода.
При замене порогового датчика смещения (если это допустимо условиями эксплуатации) на достаточно
прецизионный пропорциональный датчик смещения может выполняться калибровка сервопривода, аттестация и тренд - анализ для диагностики отказов .
Предлагаемый сервопривод имеет большие, чем у прототипа, длину и вес (для р 1 длина сервопривода в и; 1,4 раз а больше, чем у прототипа). Однако этот недостаток носит формальный характер, поскольку для получения хотя бы части полезных свойств предлагаемого сервопривода (надежности, контролепригодности) прототип должен быть дублирован. Таким образом, при сравиении в равных условиях предлагаемый привод не хуже прототипа и по весогабаритным характеристикам. .
Следует отметить, что предлагаемый привод легко стыкуется с
ЦВМ, работающим в обычных кодах, требуя при этом только введения дополнительно устройства преобразования обычного двоичного кода в р-код Фибоначчи. Названное устройство по
сложности сопоставимо с устройством
развертки и может быть реализовано в виде интегральной схемы.
Предлагаемый сервопривод требует минимума дополнительного оборудования и времени для контроля и диагностики и обеспечивает прогрессивный способ эксплуатации по техническому состоянию и поэтому может найти широкое применение в сложных, ответственных и прецизионных системах с цифровым управлением.
Формула изобретения
единичный выход триггера соединен с первым входом элемента И и является одним из выходов устройства развертки р-кода Фибоначчи, входами которого являются первые входы элементов
ИЛИ, выход элемента ИЛИ соединен с входом триггера, нулевой выход которого соединен с (р+3)-входом элемента И, вторые входы элементов И всех функциональных ячеек, начиная с
(р+1)-й ячейки, соединены между собой и являются контрольным входом устройства развертки р-кода Фибоначчи, входы от 3 до (р+3)-го элемента И функциональной ячейки, начиная с
(р+1)-й ячейки, подключены соответственно к нулевым выходам триггеров ячеек от (6-1) до (6-р-1), вторые и третьи входы элемента ИЛИ подключены к выходам элементов И (t+1) и
(6+р+1)-й ячеек.
Источники информации, принятые во внимание при экспертизе
