(54) УСТРОЙСТВО ДЛЯ ОТОБРАЖЕНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ НА ЭКРАНЕ ЭЛЕКТРОННОЛУЧЕВОЙ . ,-1 Изобретение относится к технике формирования сложных динамических изображений проекций трехмерных объектов на экране эпектроннопучевсйтрубки (ЭЛТ) и может быть использовано в системах отображения информации тренажеров ддя обучения управлению подвижными объектами, в игровых автоматах, системах автоматизированного контроля ипи управления, а также вездеj где необходим син,тез изображений проекций трехмерный объектов на плоскость, динамика которых заключается в неограниченном перемещении и повороте изображения в реальном времени на любой угол вокруг шобых из трех осей трехмерной системы координат. Известно устройство дйя отображения . информации на экране ЭЛТ, которое содержит счетчики координат по осям X и Y, генератор импульсов, блок ввода информации, синхрогенератор и другие блоки l.
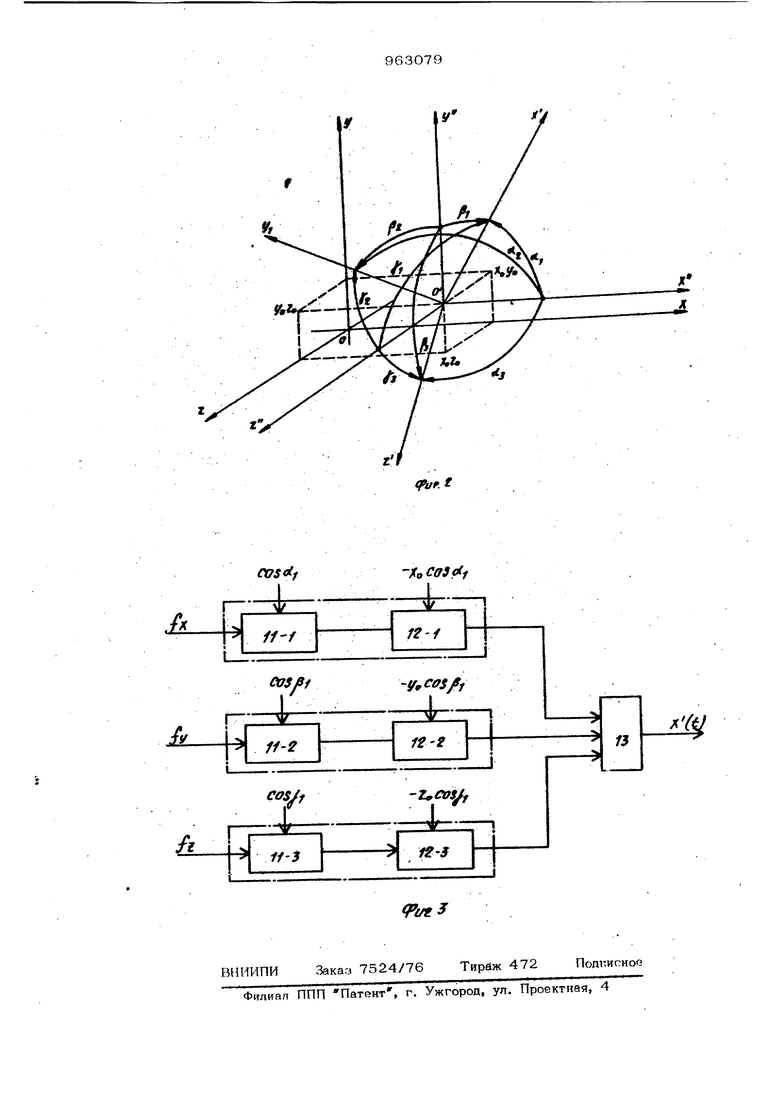
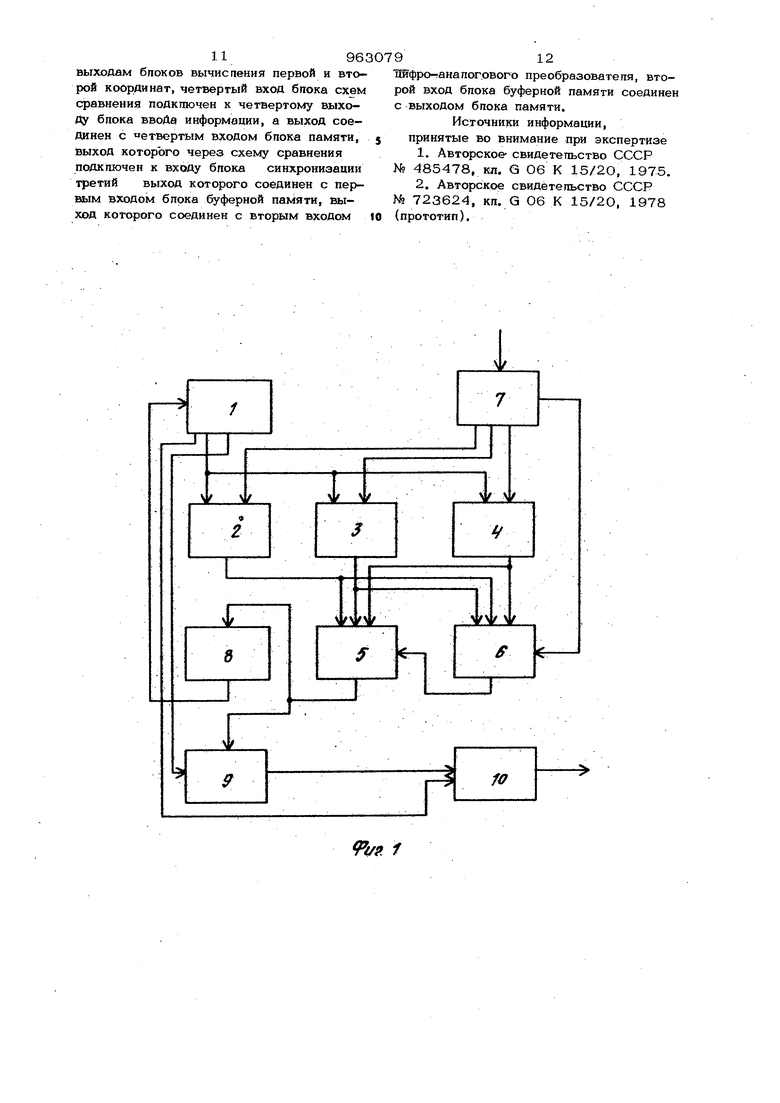
ТРУБКИ Однако данное устройство не обеспечивает перемещение и поворот формируемого изображения на тот или иной угол, а также спожно по, конструкции. Наиболее близким по технической сущности к предлагаемому является устройство для отображения информации на экране телевизионного индикатора, содержащее блок синхронизации, первый выход которого соединен с пероым входом цифро-аналогового преобразователя, а второй выход - с первыми входами блоков вычисления первой и второй коордгшат, выходы которых соединены с первыми и вторыми входами блока памяти, а входы - с первым и вторьпл входами блока ввода информации 2. Однако известное устройство позволяет формировать на экране ЭЛТ изображения проекций трехмерных объектов, имекяцих только три, а не шесть степеней свобслы. - Цель изобретения - расширение области применения устройства за счет попу396чения изображений проекций трехмерных объектов, имеющих шесть степеней свободы и устранение изображений невидимых частей изображения объекта. Указанная цегаь достигается тем, что в устройство, содержащее блок синхронизации, первый выход которого соединен с первым входом цифро-аналогового преобразователя, а второй выход - с первыми входами блоков вычисления первой и второй координат, выходы которых соединены с первым и вторым входами бло,ка памяти, а вторые входы блоков вычисления первой и второй координат - с первым и вторым выходами блока ввода информации,-введены блок буферной памяти, схема сравнения, блок схем сравнения и блок вычисления третьей координаты, первый вход которого подключен к третьему выходу блока ввода информации, второй вход блока вычисления третьей коордйна- ты соединен с вторым выходом блока син хронизации, а выход - с третьим входом блока памяти и первым входом блока схем сравнения, два другие входа которого поД ключены к выходам блоков вычисления первой и второй координат, четвертый вход бпока схем сравнения подключен к, четвертому выходу блока ввода информации, а выход соединен с четвертым входом блошка памяти, выход которого через схему сравнения подключен к входу блока синхронизации, третий выход которого соединен с первым входом бпока буферной памяти, выход которого соединен с вто. рым входом цифро-аналогового преобразо..- , „ ватепя, второй вход блока буферной памяти - с выходом блока памяти. На фиг. 1 представлена структурная схема предлагаемого устройства; на фиг. 2 эпюра, иллюстрирующая поворот и параллельный перенос трехмерной системы координат; на фиг. 3 - структурная схема блока вычисления координат. Блок памяти содержит матрицу запоминающих устройств, организованную по типу 3 D (трехкоординатная адресная система), а каждый блок вычисления координат содержит три цифровых интегратора, выходы которых подключены к входам сумматора, а вхсдаы явпяются входами импульсных последовательностей с частотами сканирования матрицы по трем координатам, причем выход сумматора является выходом бпока. Организация матрицы аапоминакядих устройств (ЗУ) по типу 3D позволяет записать в каждую ее ячейку информацию о яркости и цвете каждой точки простран94ства, в котором помешен трехмерный ото- бражаемый объект. При этом значения кода яркости точек поверхности объекта выше значения кода яркости фона, т.е. среды, в которую помещен объект. Путем определенной организации процесса считывания информации можно попучить изображение проекции объекта на плоскость экрана электроннолучевой трубки при любом повороте системы координат объекта относительно координат экрана. Порядок считывания информации, определяется математическим описанием параллельноро переноса и поворота трехмерной системы координат, Поворот осей трехмерной системы координат описывается посредством так называемых направляющих косинусов, т.е. косинусов девяти углов между каждой из осей развернутой системы координат и каждой осью опорной системы координат, Обозначения этих косинусов сведены в таблицу С учетом параллельного переноса выражение для поворота трехмерной систеЫЬ координат можно записать в таком «лим X XcosoC,+Yco ;p -«-2cx353r-i-(XoCOSot + YoC09fi l.ZoCOS); ,. . . Y-XCo5(5L,2. YCOS/,J.(Xoe06a(2 - foCOSp.t-fZoCOSJ,);(1) 2 XCO«,i.%44005fV 4-lC05T -(XoC05 Jti- Vo jJ - ZoCO-irb), где Х,Ч, Z - текущие адреса опорной системы координат; XQ Vn Z flApec центра вращения в системе координат; Х V z inHe адреса вращающей ся и перемещающейся систеМЫ координат. Гра4ическая интерпретация выражений (1) приведена на фиг. 2. (Отрицательные направления координатнъгх осей XiY, 2L и Х , f Z не приведены. Значками X,v,z обозначена система координат параллельная системе координат у V I I Для практического использования выражения (1) с1 1едует уточнить, введя сме щение точки центра вращения относитепь- „но начала координату Y , 2 на вепичины, соответственно обозначаемые Уо,УоЧ Это уточнение позволяет описать враще ние системы координат х , У , 2. не только вокруг ее начала, но и вокруг любой другой точки системы. С учетом этого выражения (1) примут вид Х-XcoSot YC06| -«2cos3-1-(XoCO5Ы -ivYoC-o lbi- -2oCOS3C, )+Хо Y - XcoSicA YtOS (-(, YoCos a+2oCOsTa)(2 l-XcoV,,.t2COST(oC05ot3- tY t2 COST ) ,YO I о - адрес центра вращения в системе кoopДинaтXY г. Поп ученные выражения можно технически реализовать с помощью специализированных вычислительных устройств, каж дое из которых содержит три интегратоpa и сумматор. Каждый интегратор, в свою очередь, содержит последовательно соединенные двоичный дискретный дедагель частоты и двоичный реверсивный счет- чик. Выходы интеграторов соединены с входами сумматора. На выходе сук матора формируется код текущего значения координаты Х, или у/ и пи 7. : Если изменять значения координат X и Y по закону движения луча по телевизионному растру, а величину Z от нупя до. максимума за время одного шага величины Х .получим некоторый трехмерный растр, т.е. сможем последовательно обойти все точки пространства, ограничен ного прямоугольником, три ребра которого являются координатными осями X Z а три других ребра описываются выражением шах - v-nax - Проекцию тела, помещенного в это -пространство, на плоскость можно получить, если каждой точке плоскости X,Y поставить в соответствие все точки про странства, лежащие на линии, параллепь ной оси Z и проходящей через .данную точку на плоскости X и Y, Поставив в соответствие системе коо динат Х , Y, z систему координат матрицы ЗУ, т.е. считывания ее адресными функциями, вычисляемыми по выражениям (2 в системе координат растра, совмещенной с плоскостью X и Y, получим проекцию системы координат матрицы на плоскость растра. 96 96 Все точки матрицы ЗУ, имеющие в системе координат растра (X и V ) одинаковые адреса (Х и ) и отличающиеся топько адресами по координате Z будут спроецированы в одну точку с координатеми Zo, причем ZoO- Спедоватепьно, яркость этой точки на растре будет складываться из яркостей видимой и невидимой со стороны плоскости X И Т поверхности объекта, изображение которого записано в матрице ЗУ. Это нежелательный эффект, внешне выражающийся в одикаковой видимости на экране видимых и невидимых частей объекта. Объект отображается как бы прозрачным. В связи с этим необходимо введение в схему устройства, схемы сравнения, прекращающей процесс сканирования матрицы по координате Z в момент достижения развертываюшей функции по Z точки на видимой, т.е. ближащей к плоскости X MY поверхности объекта. Такая точка может быть опознана по вегшчине уровня яркости, не равной нуГгевой, т.е фоновой (изображение на черном фоне). Сканирование по Координате - прекращается до моменV. или Y, после 1та изменения адресов чего начинается с нуля. Устройство содержит (фиг. 1) блок 1 синхронизации, блоки 2-4 вычисления координат, блок 5 памяти, блок 6 схем сравнения, блок 7 ввода информации, схему 8 сравнения, блок 9 буферной памяти, цифро-аналоговый преобразователь 10. Блок расчета координат содержит три двоичных дискретных делителя частоты 11-1, 11-2, 11-3, три двоичных реверсивных счетчика 12-1, 12-2, 12-3 и сумматор 13. Частотные выходы двоичных Делителей частоты являются входами частот сканирования матрицы по трем координатам: , ч, f. Выходы двоичных дискретных делителей частоты 11-1, 11-2, 11-3 соединены со счетными входами реверсивных счетчиков 12-1, 12-2, 12-3, выходы которых подключены к входам сумматора 13, а его ьыход является выходом блока Установочные входы реверсивных счетчиков 12-1, 12-2, 12-3, их входы управляющие реверсом и входы установки коэффициентов пересчета двоичных дискретных Делителей частоты 11-1, 11-2, 113 являются управляющими входами блока Перед началом процесса отображения информации в ячейки ЗУ блока памяти адресным способом заносятся коды яркости и цвета всех точек поверхности отображаемого объекта, после чего процесс формирования изображения происходит следукнцим образом Блок 1 синхронизации формирует импульсные последовательности частот сканирования трехмерного растрату f zЭти последовательности поступают на вхо ды блоков 2-4 вычисления координат, на вторые входы которых через блоки ввода информации из управпягощей вычислительной машины поступают значения коэффициентов и свободных членов выражений системы (2). Формируемые на выходах блоков 2-4 вычисления координат коды текущих значений адресных функций Х,у и 2. поступают на соответствующие входы блока 5 памяти и блока 6 схем сравнения, где они сравниваются с кодами границ области системы координат матрицы ЗУ блока 5 памяти, в которой записа но изображение объекта. Формируемый блоком схем 6 сравнения сигнал запрещает считывание информации из. матриць ЗУ блока 5 памяти из областей, где нет изоб ражения объекта. Выходной сигнал блока 5 памяти, преД ставляющий собйй код яркости различных точек изображения, поступает на вход бло ка 9 буферной памяти и схемы 8 сравнения, где он -сравнивается с кодом яркости фона. Выходной сигнал схемы 8 срав нения, поступающий на вход блока 1 синхронизации прекращает формирование на его выходе импульсной последовательности частоты сканирования изображеьшя по координате 2 в момент достижения кодом величинъ Z)i значения адреса ячейки ЗУ, в которой записан код яркости отличный от фонового. Сканирование по координате Z возобновится с нулевого адреса после изменения адреса по ординате % или Y.. В блоке 9 буферной памяти производит ся согласование скоростей считывания информации из блока 5 памяти и скороетей разверток телевизионного растра. Фор;мируек«;1й на выходе блока 9 буферной па мяти код яркости изображения поступает на вход блока цифро- налогового преобразователя 10, где он преобразуется в видеосигнал изображения и снабжается необходимыми импульсами синхронизации разверток растра и гашения обратного хода пуча. Пример. Максимальная частота сканирования матрицы ЗУ определяется до пустимой скоростью выборки адресов применяемой элементной базы. Наилучшие образцы современных отечественных элементов памяти Дают возможность довести частоту смены адресов выборки до ъ мГц. Остальные частоты (f и f у ) определяются этой величиной и размерами матрицы ЗУ. Из анализа разпичнь х классов задач, решаемых устройством отображения можно сделать вывод о том, что наиболее употребляемой может считаться матрица ЗУ кyбичec coй формы со стороной 128 элементов. Тогда частоты f и f определяются следующим образом fx Т28 f2 . г ЗО5 Гц. Блок синхронизации формирует эти импульсные последовательности и они поступают на соответствующие входы бпоков 2-4 вычисления координат., Иа Другие входы этих блоков иа управляющей вычислительной машины через бпок 7 ввода информации поступают коды направпяющих косинусов, которые устанавливают в них коэффициенты деления частот двоичными дискретными делителями частоты, а также свободные члены выражения (2), как показано на фиг. 3 для случая формирования блоком расчета координат текущего кода выборки адреса ХЧ-Ь). Импульсные последовательности с выходов двоичных дискретных делителей частоты поступают на счетные входы реверсивных счетчиков 12-1, 12-2 и 12-3. На вход управления реверсом этих счетчиков поступает код знака косинуса соответствующего угла, а на установочньте входь в качестве начальных условий - коДы свободных членов выражений системы (2). Выходные сигналы цифровых интеграторов, образованных двоичными дискретными делителями частоты и соответствующими реверсивн 1ми счетчиками, поступают на входы сумматоров 13 (фиг. 3), на выходах которых, являющихся выходами блоков расчета координат, формируются коды выборки адресов матрицы ЗУ Х , Y и 2.. Эти коды поступают на адресные входы блока 5 памяти и входы блока 6 схем сравнения. В блоке 5 памяти эти коды производят выборку адресов ячейки ЗУ по координатам у , Y и Z, блоке 6 схем сравнения они сравниваются с максимальными и минимапьньп 1и значениями адресов матрицы ЗУ, определяющими область ЗУ, в которой записано изображеш1е отображаемого объекта. Это необходимо делать потому, что в общем случае в матрице ЗУ могут быть записаны изображения нескольких объектов и выбор отображаемого объекта может производиться изменением кодов максимальных и минимальных значений адресов матрицы ЗУ, тем самым определяя область, где находится требуемый объект. Выходной сигнал блока схем сравнения поступает на вход разрешения обращения к ЗУ в те моменты, когда блоки вычисления кооргдинат фо мируют коды выборки адреса в той облас ти, где находится отображаемый объект. Код яркости изображения с выхода блока памяти поступает на вход схемы сравнения, на одном входе которой установлен нулевой код, соответствующий фоновой яркости изображения. На выходе схемы сравнения формируется сигнал, который, поступая на вход блока 1 синхронизации, -прекращает формирование импуль . -г г гснои последовательности I то равногсильно прекращению сканирования трехмер ного растра по оси Z, благодаря чему предотвращается отображение невидимых частей объекта. Период считывания информации из матрицы ЗУ принятого размера можно определить, используя следующее вырандание 128 0,42 с.. Если сравнить эту величину с периодом кадровой развертки (0,О2 с) становиться ясной необходимость применения блока 9 буферной памяти для согласования пе риодов считывания информации из блока 5 памяти и отображения ее на экране ЭЛТ. Блок 9 буферной памяти состоит из двух частей, каждая из которых представляет собой ЗУ, организованное по типу 2Б-} Работают эти части с разделением времени, т.е. в то время, когда информация из блока 5 .памяти переписывается в одну часть ЗУ, из второй производится считывание и воспроизведение ее на экране ЭЛТ. В момент завершения процесса переписи информации части буферного- ЗУ меняются фу псциями и процесс возобновляется. Таким образом, на экране электроннолучевой трубки формируется изображение проекции трехмерного объекта на картинную плоскость. Воспроизводятся только видимые со стороны картинной плоскости .части изображения поверхности объекта. При повороте системы координат матрицы отпосител1: но с:.истемы координат растра происходит соответствующее изменение внешнего вида этой проекции аналогично Bpamemiro самого объекта или его нетуральной модели перед объективом телекамеры. Сравнение технико-экономического эффекта предлагаемого устройства с известными показывает его преимущества в объеме используемого оборудования, оперативности управления и качестве изображения. Действительно, при реализации метода фиксирования в матрицах, организованных по типу 2D изображений отдельных фаз движения требуется 4,281О ° бит памяти, в то время как в предлагаемом устройстве при те± же условиях используется 14,68-10 бит, т.е. почти в ЗООО ся 14,68- 10 раз меньше. Устройство не требует повыщенного быстродействия от управляющей вычислиоыстродеиствия от управляющей вычиспи„тельной мащинъ в связи с несложность тельной машинъ в связи с несложностью вычисления коэффициентов и свободных членов уравнений, описывающих процесс. Кроме того, возможно использование несложного преобразователя сигналов датчиков в величины, требуемью для расчета координат. Формула изобретения Устройство для отображения графической информации на экране электроннопучевой трубки, содержащее блок синхронизации, первый выход которого соединен с первым входом цифро-аналогового преобразователя, а второй выход - с первыми входами блоков вычисления первой и второй координат, выходы которых соединены с первым и вторым входами блока памяти, а вторые Bxo№i блоков вь чпспения первой и второй координат соединегш с первым и вторым выхода ии блока ввода информации, отличающееся тем, что, с целью расширения области применения за счет пол чения изображе НИИ проекций трехмерных объектов, имеющих щесть степеней свободы и устранения изображений невидимых частей изображений объекта, в устройство введены блок буферной памяти, схема сравнения, блок схем сравнения и блок вычисления третьей координаты, первый вход которого подключен к третьему выходу блока ввода информации, второй вход блока вычисления третьей координаты соединен с вторым выходом блока синхронизации, а выход - с третьим входом блока памяти и первым входом блока схем сравнения, два Других входа которого подключены к выходам блоков вычисления первой и второй координат, четвертый вход бпока схем сравнения подкшочен к четвертому выходу бпока ввоДа информации, а выход соединен с четвертым входом бпока памяти, выход которого через схему сравнения подкшочен к входу бпока синхронизации третий выход которого соединен с первым входом бпока буферной памяти, выход которого соединен с вторым входом 96 9 Цйфро-ганапогового преобразователя, второй вход бпока буферной памяти соединен с выходом блока памяти. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 485478, кп. Q Об К 15/2О, 1975. 2,Авторское свидетельство СССР Ns 723624, кп. Q Об К 15/20, 1978 (прототип).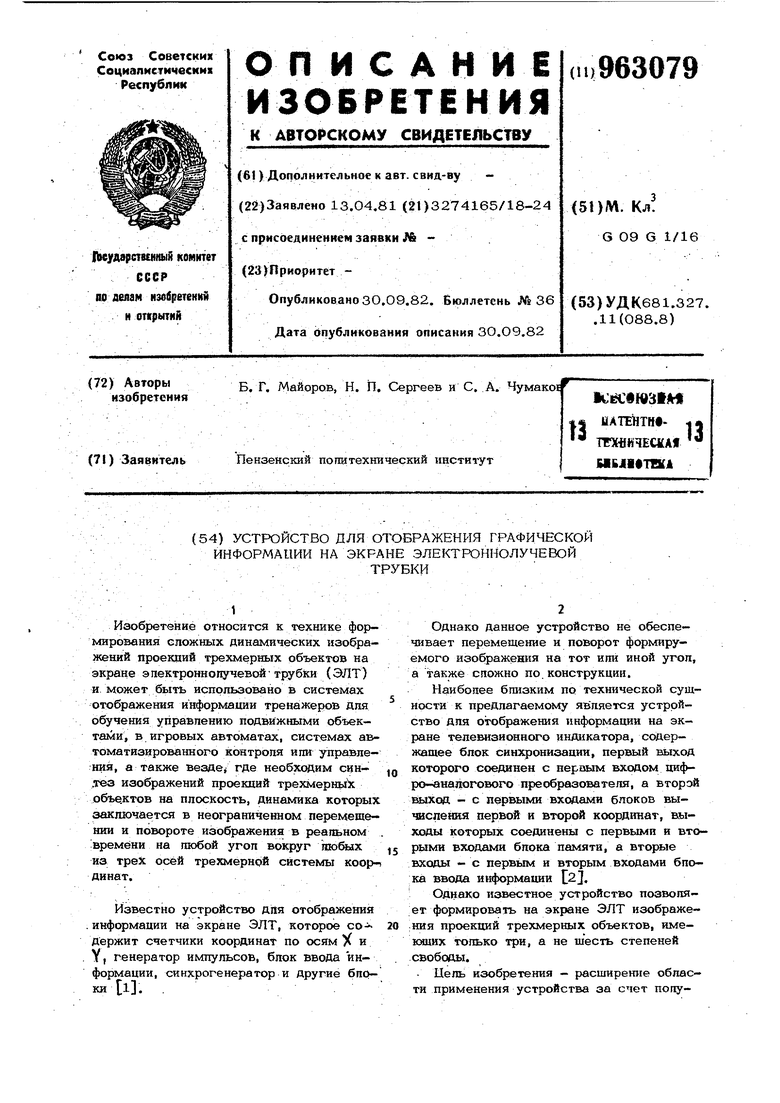

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отображения графической информации на экране телевизионного индикатора | 1989 |
|
SU1615783A1 |
| Устройство для формирования информации на телевизионном индикаторе | 1981 |
|
SU1075298A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЯ | 1992 |
|
RU2045781C1 |
| УСТРОЙСТВО ОБРАБОТКИ ДВУХМЕРНЫХ И ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ | 2005 |
|
RU2289161C1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ВЫСОКОГО РАЗРЕШЕНИЯ | 1996 |
|
RU2127961C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЦИФРОВОГО СИГНАЛА ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2287909C2 |
| Устройство для отображения радиолокационной информации на экране электронно-лучевой трубки | 1980 |
|
SU938309A1 |
| Устройство для отображения радиолокационной информации на экране электронно-лучевой трубки | 1989 |
|
SU1691880A1 |
| Устройство для отображения информации | 1989 |
|
SU1695373A1 |
| Буферное запоминающее устройство | 1989 |
|
SU1626262A1 |