(5) АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| Способ управления импульсным преобразователем постоянного тока и устройство для его реализации | 1976 |
|
SU658696A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2008 |
|
RU2373624C1 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1985 |
|
SU1339850A1 |
| Однотактный преобразователь напряжения постоянного тока | 1985 |
|
SU1274088A1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
| СПОСОБ УПРАВЛЕНИЯ ОБЩЕЙ БАЛЛАСТНОЙ НАГРУЗКОЙ В АВТОНОМНОЙ МНОГОМОДУЛЬНОЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКЕ НА ОСНОВЕ ДВИГАТЕЛЕЙ СТИРЛИНГА | 2015 |
|
RU2606979C1 |
| ТЕРМОСТАТ ДЛЯ КАЛИБРОВКИ И ПРОВЕРКИ ОКЕАНОГРАФИЧЕСКИХ ПРИБОРОВ | 2012 |
|
RU2506624C2 |
| Регулятор скорости двигателя | 1980 |
|
SU921010A1 |
,
Изобретение относится к авто- матическому регулированию и может быть использовано при автоматизации производственных процессов.химической , нефтехимической и газовой промышленности, в частности, для регули рования процесса производства химволокна.
Известно/ аналоговое регулирующее устройство, содержащее последователь но соединенные интегрирующий блок, переключатель режима работы и усилитель, выход которого через последова тельно соединенные первый согласующий блок и дифференцирующий блок соединен с первым входом интегрирующего блока, и блок дистанционного управления , который через -формирователь сигнала соединен со вторым;Эходом переключателя режима работы, в котором, с целью повышения надежности и точности устройства., установлен бл,ок настройки и второй согласуюций блок, причем второй выход первого сО
2
гласующего блока соединен со входом интегрирующего блока, а второй согласующий блок - со вторым входом формирователя сигнала 1. Недостатками этого регулятора-яв- 5 ляются низкое качество регулирования и ограниченность его применения для управления обт ектами с переменными динамическими характеристиками.
1аиболее близким по технической
10 сущности к предлагаемому является электронный регулятор с дистанционным регулированием, содержащий сумматор, на первый вход которого по дается регулируемый сигнал, который также подается на первый вход, диф ференцирующей части. На второй вход сумматора подается задающий сигнал. Выход сумматора соединен с выходом
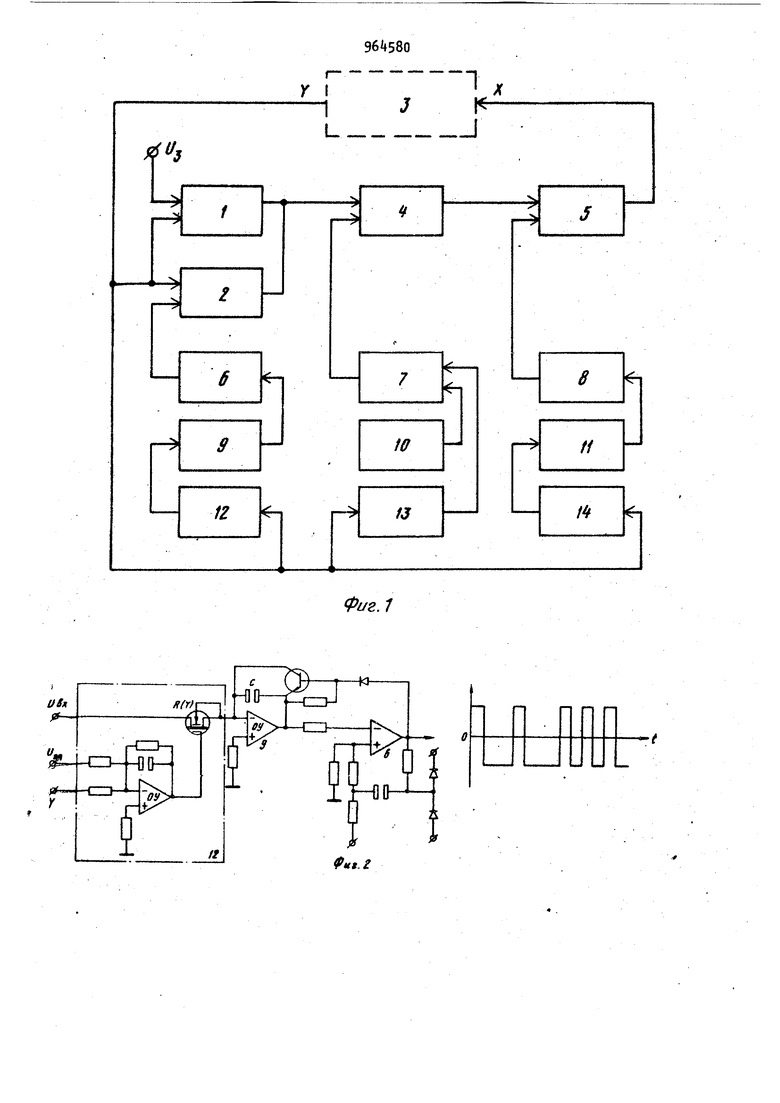
20 дифференцирующей части и первым входом усилителя пропорциональной части-, вых,од которого соединен с первым входом интегральной части. На вторые входы дифференциальной, пропорци- 39 ональной и интегральной частей подаются сигналы с отдельных генераторов, биполярных импульсов, два из которых генерируют импульсы постоянной длительности с переменным периодом, а третий генерирует импульсы с переменной скважностью. Эти генераторы состоят из генератора пилообразного напряжения, выход которого соединен со входом компаратора. С выхода компаратора снимаются описанные выше последовательности импульсов для управления параметрами регулятораС2. Недостатком известного электронного регулятора является то, что реа лизация параметров последовательност импульсов управления в широком динамическом диапазоне возможна лишь вручную дискретным изменением времязадаюнАих элементов в генераторах пилообразного напряжения при регулировании динамических параметров ральной и дифференциальной частей и резисторов в делителем напряжения при регулировании в пропорциональной части регулятора. В известном регуляторе изменение динамических параметров в узком диапазоне производится изменением входных напряжений с помощью потенциомет ров. Кроме того, для поддержания постоянного качества регулирования необходимо знать функциональную зависи мость изменения динамических характе ристик управляемого объекта и динами ческих параметров регуляторов. Все указанные недостатки приводят к тому, что известный регулятор не обеспечивает устойчивость, точность и быстродействие регулирования при изменении динамических характеристик управляемого объекта. Цель изобретения - расширение диа пазона регулирования, повышение точ.ности и быстродействия регулятора. Поставленная цель достигается тем что в автоматический регулятор, содержащий последовательно соединенные блок сравнения, пропорциональное звено, интегрирующее звено, выходом подключенное к объекту регулирования, выход которого coeiqMHeH с вторым входом блока сравнения и через дифференцирующее звено - к выходу блока сравнения, а также в трех каналах управления дифференцирующим, пропорциональ ным и интегрирующим звеньями подключе ны последовательно соединенные генера тор пило бразног6 напряжения и компаратор, выход каждого из которых подключен к вторым входам соответственно дифференцирующего,пропорционального и интегрального звеньев, введены в каждый канал управления блоки управляемой проводимости, вход каждого из которых подключен к выходу объекта, а выход в каналах управления дифференцирующим и интегрирующим звеньями к входу генератора пилообразного напряжения, а в канале управления пропорциональным звеном - к второму входу компаратора. На йиг. 1 изображена структурная . схема предлагаемого регулятора; на фиг. 2 и 3 пример конкретного выполнения схем регулирования динамических параметров регулятора. Регулятор включает блок 1 сравнения, дифференцирующее звено 2, объект регулирования 3, пропорциональное звено k, интегрирующее звено 5, компараторы 6-8, генераторы пилообразного напряжения, блоки 12-1 управляемой проводимости. Регулятор работает следующим образом. При изменении сигнала с выхода объекта регулирования 3 под действием каких-либо внешних возмущений на выходе блока 1 сравнения и дифференцирую- щего 2 звена появляются сигналы, представляющие собой разность задающего и входного сигнала и дифференциал от , входного воздействия. Сумма этих си|- налов подается на вход пропорциональ ного звена i, в котором происходит изменение величины суммы этих сигналов, в зависимости от процесса регулирования. Для получения интегральной составляющей закона регулирования сигнал с выхода пропорционального звена подается на вход интегрирующего звена 5, с выхода которого снимается сигнал управления объектом регулирования. Изменение динамических параметров регулятора происходит по трем каналам управления. Изменение постоянной времени дифференцирующего 2 и интегрирующего 5 звена происходит последовательностью управляющих импульсов постоянной длительности с переменным периодом следования, получаемых на выходах компараторов 6 И 8. Период следования импульсов задается изменением частоты пилообразно го напряжения, вырабатываемого в генераторе пилообразного напряжения под действием из 1енения одного из времязадающих элементов. В качестве этогоj времязадающего элемента в настоящем регуляторе используются блоки 12 и 1 управляемой проводимости. -Управление постоянной времени, дифференцирую- $ щего 2 и интегрирующего 5 звеньев происходит непосредственно сигналом с выхода объекта регулирования 3 по закону, заданному в блоках управляемой проводимости 12 и 1 i.-10
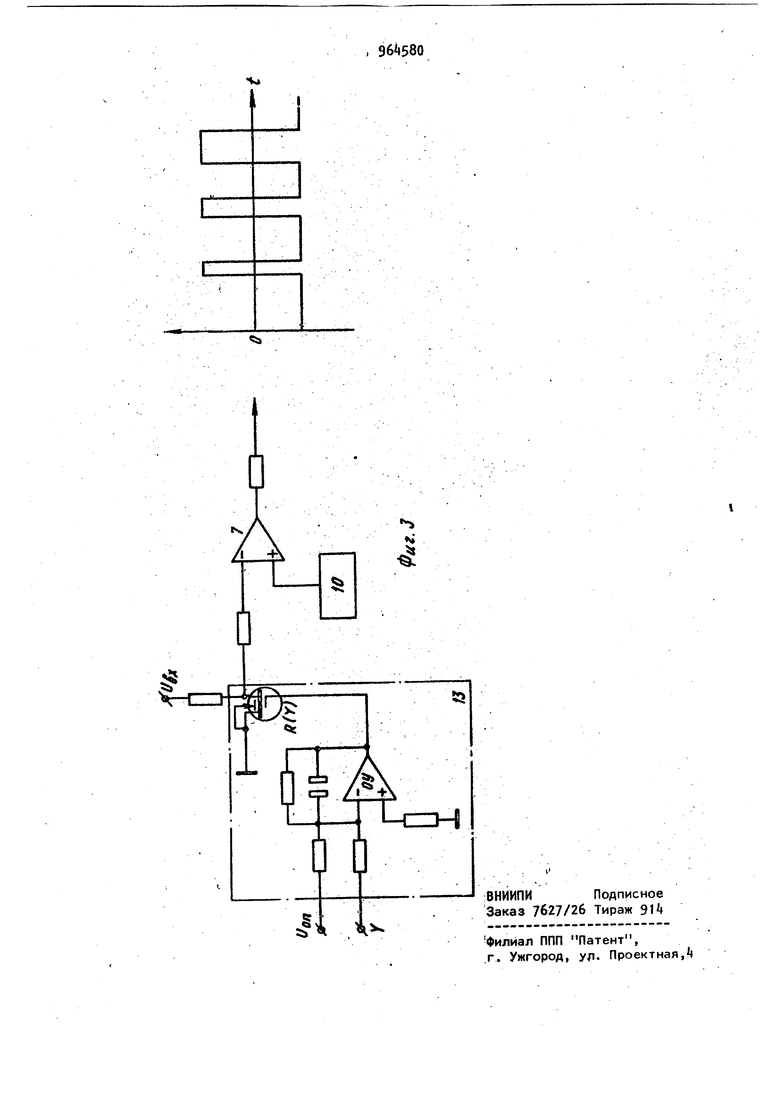
Частоту изменения пилообразного напряжения рассчитывают по формуле f- Ц&х
ЩУГсл/ж
где tgx напряжение на входе интегра- ts
тора;
)- функция изменения эффективного сопротивления канала проводимости полевого транзистора под воздействием си г-20 нала с выхода объекта регулирования ;
С - емкость В цепи обратной связи операционного усилителя; пик. максимальное значение амплиту-25
ды пилообразного напряжения. Управление коэффициента усиления пропорционального звена происходит последовательностью управляющих импульсов постоянной частоты, но пере- 30 менной скважностью. Управление скважностью осуществляется изменением сопротивления одного из плеч делителя напряжения, подаваемого на вход компаратора.35
В качестве изменяющегося сопротивления в делителе используется блок 13 управляемой проводимости, который также связан с выходным сигналом объекта регулирования 3. ункмиональная о зависимость изменения скважности задается функцией изменения сопротивлег ния блока 13 управляемой проводимостью. На фиг. 2 и 3 показаны принципиальные схемы управления динамическими 45 параметрами регулятора.
Введение блоков управляемой проводимости позволяет расширить динамиче кий диапазон изменения параметров последовательности управляющих импуль- j.,j сов за счет достаточно широкого диапазона изменения эффективного сопротивления канала проводимости полевого транзистора и мохет быть устроен по
линейному и нелинейному закону. ТочHOfcTb и быстродействие увеличиваются за счет применения электронного управления динамическими параметрами регулятора.
По оценкам, сделанным в ходе разработки и испытаниях, проводимых на опытном образце, динамический диапазон предлагаемого регулятора расширился в три раза, а точность и быстродействие увеличились в два раза по сравнению с известным.
Формула изобретения
Автоматический регулятор, содержащий последовательно соединенные блок сравнения, пропорциональное звено, интегрирующее звено, выходом подключенное К объекту регулирования, выход, которого соединен с вторым входом блока сравнения и через дифференцирующее звено - к выходу блока сравнения, а также в трех каналах управления дифференцирующим, пропорциональным и интегрирующим звеньями подключены последовательно соединенные генератор пилообразного напряжения и компаратор, выход каждого из которых подключен к вторым входам соответственно дифференцирующего, пропорционального и интегрирующего звеньев, о т л и ч аю щ и и с я тем, что, с целью расширения диапазона регулирования, повышения быстродействия и точности регулятора, в него введены блоки управляемой проводимости, вход каждого из которых подключен к выходу объекта, а выход в каналах управления дифференцирущим и интегрирующим звеньями к входу генератора пилообразного напряжения, а в канале управления пропорциональным звеном - к второму входу компаратора..
/.
Источники информации, принятые во внимание при экспертизе
