(Sl) СПОСОБ КОНТРОЛЯ УСИЛИЙ ПРУЖИН в ЦЕТКОДЕРЖАТЕЛЕ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля усилий пружин в щеточном узле электрических машин постоянного тока | 1989 |
|
SU1739423A1 |
| Щеткодержатель для электрической машины | 1986 |
|
SU1387082A1 |
| Щеткодержатель для электрической машины | 1986 |
|
SU1361656A1 |
| Устройство для измерения усилий | 1976 |
|
SU555297A1 |
| Щеточный узел | 1978 |
|
SU826472A1 |
| Механический привод дискового тормоза транспортного средства | 1983 |
|
SU1174627A1 |
| Устройство для размерной электрической обработки | 1988 |
|
SU1590238A1 |
| Предохранительная фрикционная муфта | 1984 |
|
SU1183747A1 |
| Щеткодержатель для электрическихМАшиН | 1979 |
|
SU819872A1 |
| Привод управления муфтой сцепления транспортного средства | 1990 |
|
SU1749069A1 |
Изобретение относится к измерительной технике и может быть использовано как для контроля, так и для регулировки усилия пружин в щеткодержателе.
Наиболее близким к предлагаемому является способ контроля усилий пружин в щеткодержателе, согласно которому к нажимному элементу подсоединяют датчик и снимают с него сигнал, пропорциональный усилию. При реализации этого способа датчик помещают между пружиной и щеткой и снимают сигнал, пропорциональный усилию 1.
Однако этот способ не позволяет выявить усилие в щеткодержателе в связи с наличием знакопеременной фрикционной составляющей на нажимном элементе (рычаге) щеткодержателя. С по; мощью этого способ можно замерить лишь суммарное усилие на рычаге вмес-. Те с фрикционной составляющей, направленной в сторону уменьшения величины суммарного усилия. Это вносит неопределенность при выявлении действительной величины усилия в щеткодержателе.
Цель изобретения повышение точности измерения и получение возможности регулировки усилия пружин в щеткодержателе .
Поставленная цель достигается тем, что нажимной элемент последователь- : но отклоняют от номинального положения в противоположные стороны с усилием, изменяющимся на 20-50% от расчетного значения упругой составляющей в номинальном положении механизма, измеряют усилия по возвращении нажимного элемента в это положение
10 с замедлением 0,2-0,01 WA/C, сравнивают их действительные значения с номинальными усилиями соответствующих ветвей гистерезисной петли упругой характеристики щеткодержателя,
15 определяют полусумму этих значений как упругую составляющую, а их полуразность - как фрикционную составляющую указанной упругой характеристики и принимают эти величины за
20 действительные значения указанных составляющих.
На фиг. 1 изображен И1еткодержагель, общий вид; на фиг. 2 - упругая
25 характеристика механизма щеткодеражателя т.е. зависимость усилия Р, воздействующего на рычаг щеткодержате тя, от перемещения Е- последнего; на фиг. 3 поясняется методика, поло30женная в основу способа контроля.
Щеткодержатель (фиг. 1) состоит из корпуса 1, механизма,состоящего из пружины 2 и рычага 3, и направляющих 4, в которых располагается щетка 5. Под воздействием усилия пружины 2 рычаг 3 прижимает щетку 5, выполняющую функцию нажимного элемента к поверхности коллектора &. За номинальное напряжение рычага щеткодержателя принимается базорасстояние А,
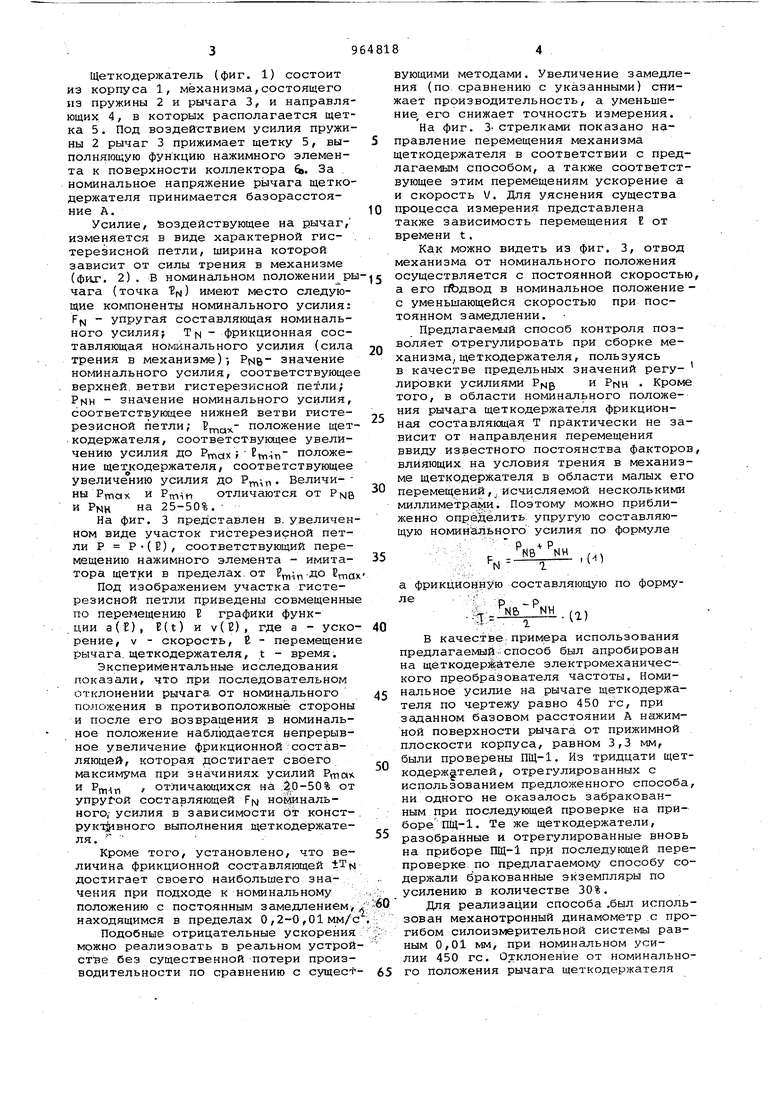
Усилие, воздействующее на рычаг/ изменяется в виде характерной гистерезисной петли, ширина которой зависит от силы трения в механизме (фиг. 2). В номинальном положении рычага (точка Ef,)) имеют место следующие компоненты номинального усилия: FN упругая составляющая номинального усилия; Т 1) - фрикционная составляющая номинального усилия (сила трения в механизме)-, РНВ значение ноглинального усилия, соответствующее верхней, ветви гистерезисной петли; PNH - значение номинального усилия, соответствующее нижней ветви гистерезисной петли; положение щет.кодержателя, соответствующее увеличению усилия до Р, f nrin положение щеткодержателя, соответствующее увеличению усилия до РПЧЛП- Величи-ны РПЮХ и Ptnin отличаются от и PNH на 25-50%.
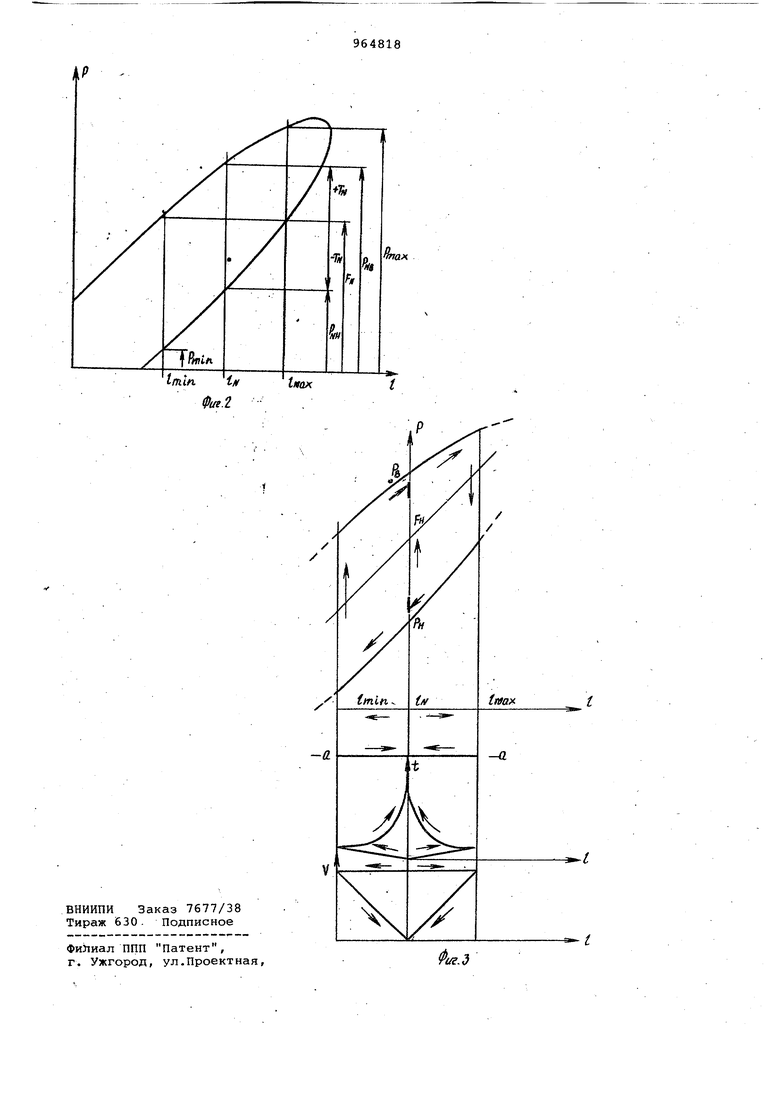
На фиг. 3 представлен в. увеличенном виде участок гистерезисной петли Р Р (Е), соответствующий перемещению нажимного элемента - имитатора в пределах, от „.до РГПОХ
Под изображением участка гистерезисной петли приведены совмещенные по перемещению Б графики функ.дни а(Е), B(t) и v(2), где а - ускорение, V - скорость, Е - перемещение рычага, щеткодержателя, t - время.
Экспериментальные исследования показали, что при последовательном отклонении рычага, от номинального положения в противоположные- стороны и после его возвращения в номинальное положение наблюдается непрерывное увеличение фрикционной составляющей, которая достигает своего максимума при значиниях усилий ч отличающихся на .|;р-50% от упруГой составляющей FM ной инального,- усилия в зависимости 6т конструкт 1вного выполнения щеткодержателя. Кроме того, установлено/ что величина фрикционной составляющей ±Т{ч1 достигает своего наибольшего значения при подходе к номинальному положению с постоянным замедлением, находящимся в пределах 0,2-0,01 мм/с
Подобные отрицательные ускорения можно реализовать в реальном устройстве без существенной потери производительности по сравнению с существующими методами. Увеличение замедления (по сравнению с указанными) снижает производительность, а уменьщение, его снижает точность измерения. На фиг. 3стрелками показано направление перемещения механизма
щеткодержателя в соответствии с предлагаемым способом, а также соответствующее этим перемещениям ускорение а и скорость V. Для уяснения существа
процесса измерения представлена также зависимость перемещения Е от времени t.
как можно видеть из фиг. 3, отвод механизма от номинального положения
5 осуществляется с постоянной скоростью, а его гЛздвод в номинальное положение с уменьшающейся скоростью при постоянном замедлении.
Предлагаемый способ контроля позволяет отрегулировать при сборке механизма щеткодержателя, пользуясь в качестве предельных значений регулировки усилиями PNB и PtsH . Кроме того, в области номинального положения рыча.га щеткодержателя фрикционная составлякщая Т практически не зависит от направления перемещения ввиду известного постоянства факторов, влияющих на условия трения в механизме щеткодержателя в области малых его
0 перемещений,J исчисляемой несколькими миллиметрами. Поэтому можно приближенно определить упругую составляющую номинального усилия по формуле
Р + Р N8 МН
(Л
а фрикционную составляющую по формуле
.,.(а)
0- - 1
В качестгве примера использования предлагаемый способ был апробирован на щеткодер :;ателе электромеханического преобразователя частоты. Номинальное усилие на рычаге щеткодержателя по чертежу равно 450 гс, при заданном базовом расстоянии А нажимной поверхности рычага от прижимной плоскости корпуса, равном 3,3 мм, были проверены ПЩ-1. Из тридцати щеткодерж телей, отрегулированных с использованием предложенного способа, ни одного не оказалось забракованным при последующей проверке на приборе ПЩ-1. Те же щеткодержатели, разобранные и отрегулированные вновь
на приборе ПЩ-1 при последующей перепроверке, по предлагаемому способу содержали бракованные экземпляры по усилению в количестве 30%.
0 Для реализации способа .был использован механотронный динамометр с прогибом силоизмерительной системы равным 0,01 мм, при номинальном усилии 450 ГС. Отклонение от номинального положения рычага щеткодержателя составило приблизительно t2 мм, что увеличивало и уменьшало измеряемое усилие на 30-40% по сравнению с номинальным. Изменение величины отклонения от номинального положения рычага щеткодержателя с усилиями, отличающимися от номинального свыше 40-50%, нерационально, так как приэтом снижается производительность, а точность остается без изменения. Начальная скорость движения к номинальному положению в эксперименте составляла порядка 0,6 мм/с. В результате .использования этого способа точность контроля, развиваем го пружиной щеткодержателя, повышается в 3 раза, причем на 30% снижается брак при регулировке щеткодержателей . Предлагаемый способ может быть ис пользован также для контроля широкого класса упругих гистерезисных систем (например, устройств гидротоплив ной автоматики, различных амортизиру квдих устройств и т.п.). Формуле изобретения Способ контроля усилий пружин в щ кодержателе , согласно которому к нажимному элементу подсоединяют датчик и снимают с него сигнал, пропорциональный усилию, о т л и ч а ющ и и с я тем, что,с целью повышения точности и получения возможности регулировки усилия пружин в щеткодержателе, нажимной элемент последовательно отклоняют от номинального положения в противоположные стороны с усилием, изменяющимся на 20-50% . от расчетного значения упругой составляющей в номинальном положении механизма, измеряют усилия по возвращении нажимного элемента в это положение с замедлением 0,2-0,01 мм/с, сравнивают их действительные значения с номинальными усилиями соответствуницих ветвей гистерезисной петли упругой характеристики щеткодержателя, определяют .полусумму этих значений как упругую составляющую, а их полуразность - как фрикционную составляющую указанной упругой характеристики и принимают эти величины за действительные значения указанных составляющих. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 153752, кл. Н 02 К 15/00, 1962.
-Тн
