изобретение относится к электрич ским машииам, а именно к электрическим двигателям постоянного тока с бесконтактной коммутацией, осуществляемой с помощью полупроводниковых приборов. Оно предназначено для использования преимущественно в электрических машинах, работающих в качестве моментных двигателей приводов следящих систем и систем стабилизации объектов различного назначения.
Известен вентильный электродвигатель, содержащий ротор, статор, датчик положения ротора (ДП) и электронный коммутатор, в котором коммутация обмоток якоря осуществляется дискретно по сигналам ДП импульсного типа, например, фотодатчика 1.
Недостатком этого электродвигателя является нестабильность скорости вращения, вызванная пульсацией вращающегося момента вследствие дискретности коммутации.
Наиболее близким к предлагаемо.му по технической сущности и достигаемому результату является вентильный электродвигатель (ВД), содержащий ротор, статор с обмоткой якоря, секции которой подключены к выходам фазочувствительных усилителей-преобразовате
лей, вход которых соединен с расположенной на статоре вторичной обмоткой, датчика положения ротора, первичная обмотка которого подключена к цепи питания высокой частоты. В устройстве совмещены магнитные и электрические цепи двигателя и датчика положения 12 .
Недостатками известного электродви10гателя являются значительная масса и габариты, так как его необходимо выполнять с электромагнитным, возбуждением.
15
Целью изобретения является сниже- , йие массы и габаритов (ВД) за счет обеспечения возможности его выполне- „ ния с возбуждением от постоянных магнитов ;
20
. Поставленная цель достигается тем, что ротор двигателя выполнен в виде чередующихся магнитомя гких полюсов различной высоты, между которыми размещены тангенциально намагниченные постоянные магниты, а первичная об25мотка выполнена с шагом, в два раза меньшим шага вторичной обмотки, и расположена на статоре.
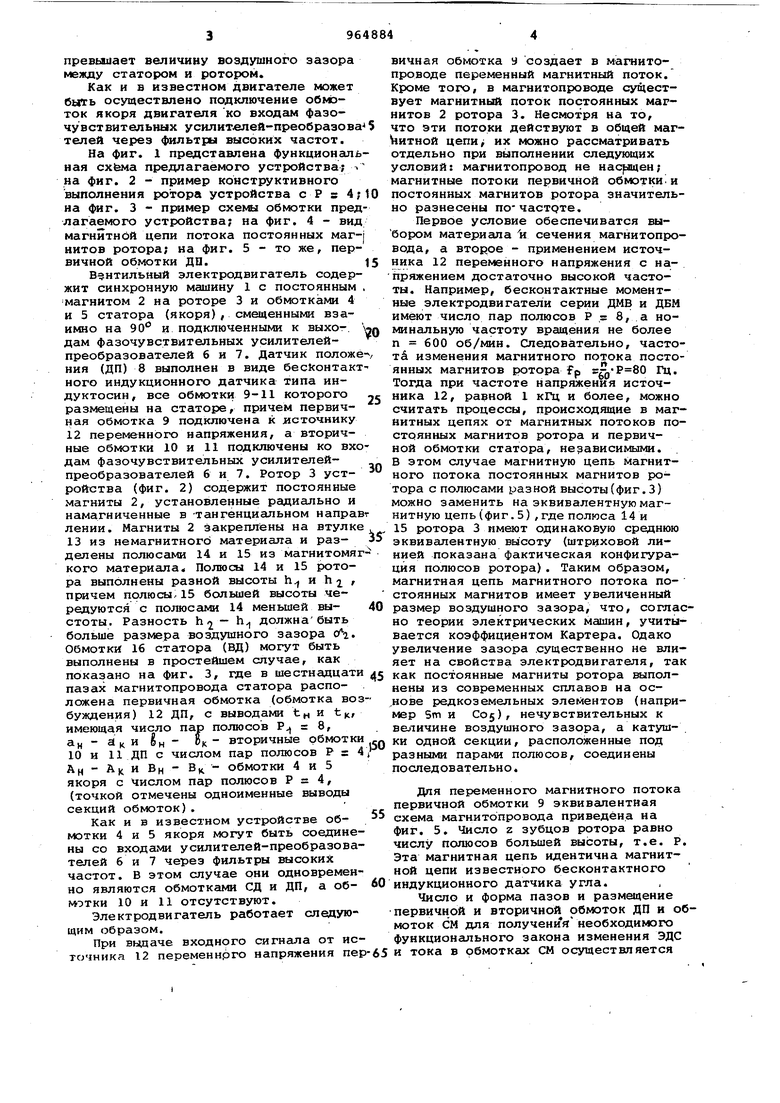
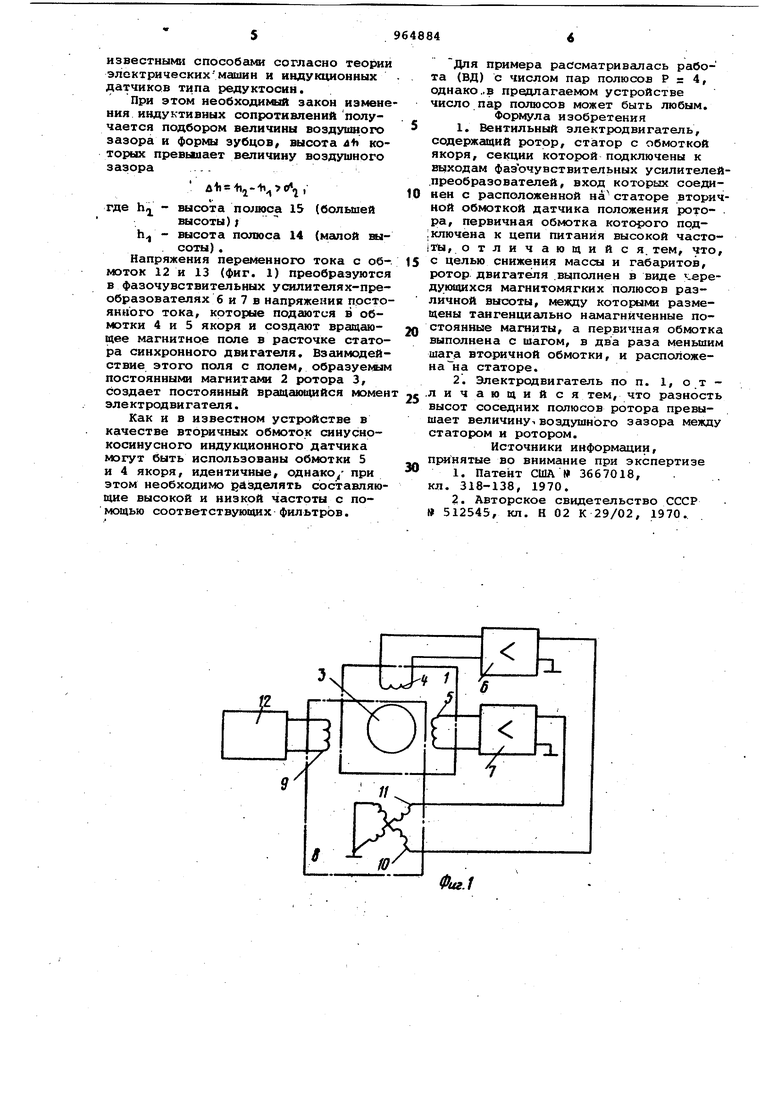
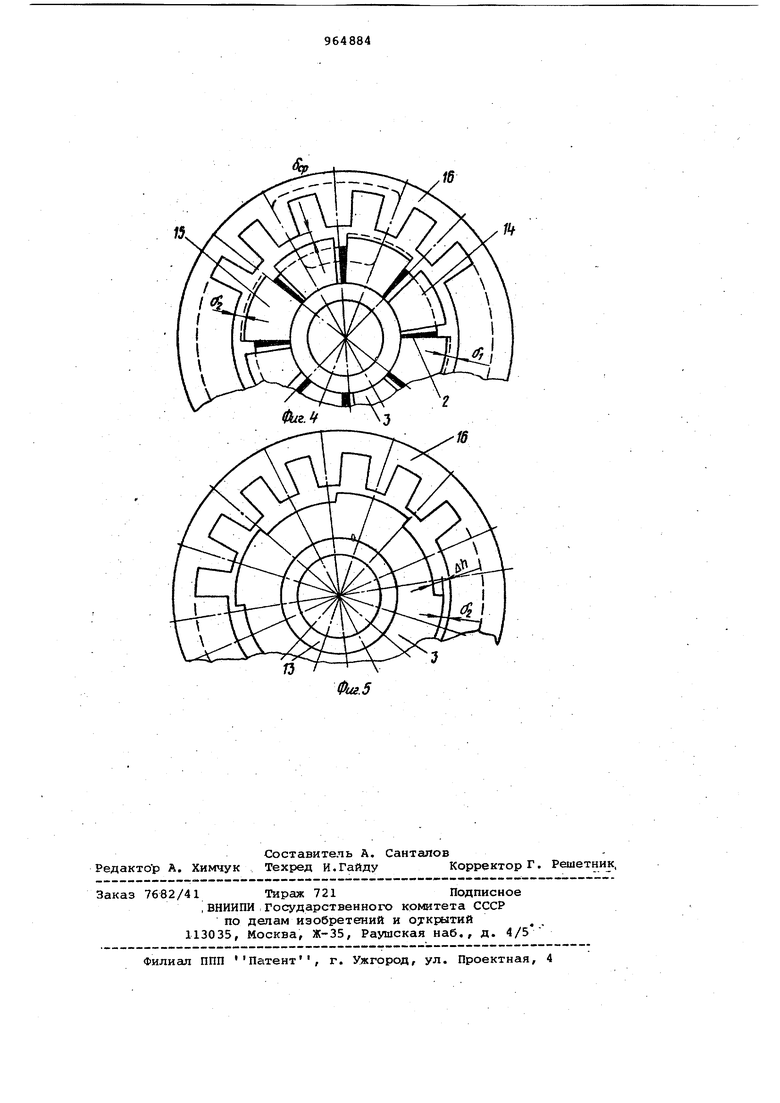
Д)1Я четкой работы коммутатора раз30ность высот соседних полюсов ротора превыиает величину воздушного зазора между статором и ротором. Как и в известном двигателе может быпгь осуществлено подключение оймоток якоря двигателя ко входам фазочувствительных усилит лей-преобразова талей через фильтры высоких частот. На фиг. 1 представлена функциональ ная схема предлагаемого устройства; на фиг. 2 - пример конструктивного выполнения ротора устройства с Р s 4 на фиг. 3 - пример схемы обмотки пред лагаемого устройства; на фиг. 4 - вид магнитной цепи потока постоянных магнитов ротора; на фиг. 5 - то же, первичной обмотки ДП. Вентильный электродвигатель содержит синхронную машину 1 с постоянным магнитом 2 на роторе 3 и обмотками 4 и 5 статора (якоря), смещенными взаимно на 90 и подключенными к выходам фазочувствительных усилителейпреобразователей 6 и 7. Датчик положе НИН (ДП) 8 выполнен в виде бесКонтакт ного индукционного датчика типа индуктосин, все обмотки 9-11 которого размещены на статоре, причем первичная обмотка 9 подключена к источнику 12переменного напряжения, а вторичные обмотки 10 и 11 подключены ко вхо дам фазочувствительных усилителейпреобразователей 6 и 7. Ротор 3 устройства (фиг. 2) содержит постоянные магниты 2, установленные радиально и намагниченные в -тангенциальном направ лении. Магниты 2 закреплены на втулке 13из немагнитного материала и разделены полюсгиии 14 и 15 из магнитомяг кого материала. Полюсы 14 и 15 ротора выполнены разной высоты h и h f причем полюсы,15 большей высоты чередуются с полюсами 14 меньшей выстоты. Разность h2- h должнабыть больше размера воздушного зазора . Обмотки 16 статора (ВД) могут быть выполнены в простейшем случае, как показано на фиг. 3, где в шестнадцати пазах магнитопровода статора расположена первичная обмотка (обмотка во буждения) 12 ДП, с выводами tn и t, имеющая число пар полюсов Р 8, OH РК вторичные обмотки 10 и 11 ДП с числом пар полюсов Р 4 Ан-АциВн-Вц - обмотки 4 и 5 якоря с числом пар полюсов Р 4, (точкой отмечены одноименные выводы секций обмоток). SКак и в известном устройстве об мотки 4 и 5 якоря могут быть соединены со входами усилителей-преобразователей 6 и 7 через фильтры высоких частот. В этом случае они одновременно являются обмотками СД и ДП, а об«:)тки 10 и 11 отсутствуют. Электродвигатель работает следующим образом. При выдаче входного сигнала от источника 12 переменного напряжения пе вичная обмотка 9 создает в магнитопроводе переменный магнитный поток. Кроме того, в магнитопроводе cyfiiecTвует магнитный поток постоянных магнитов 2 ротора 3. Несмотря на то, что эти потоки действуют в общей магбитной цепи их можно рассматривать отдельно при выполнении следующих условий; магнитопровод не наеден; магнитные потоки первичной обмотки и постоянных магнитов ротора значительно разнесены по-частрте. Первое условие обеспечиватся выбором материала и сечения магнитопровода, а второе - применением источника 12 переменного напряжения с напряжением достаточно высокой частоты. Например, бесконтактные моментные электродвигатели серии ДМВ и ДБМ имеют число пар полюсов Р 8, а номинальную частоту вращения не более п 600 об/мин. Следовательно, частотй изменения магнитного потока постоянных магнитов ротора fp S7-, Гц. Тогда при частоте напряжения источника 12, равной 1 кГц и более, можно считать процессы, происходящие в магнитных цепях от магнитных потоков постоянных магнитов ротора и первичной обмотки статора, независимыми. В этом случае магнитную цепь магнитного потока постоянных магнитов ротора с полюсами разной высоты (фиг. 3) можно заменить на эквивалентную магнитную цепь (фиг. 5) , где полюса 14 и 15 ротора 3 имеют одинаковую среднюю эквивалентную высоту (штриховой линией показана фактическая конфигурация полюсов ротора). Таким образом, магнитная цепь магнитного потока постоянных магнитов имеет увеличенный размер воздушного зазора, что, согласно теории электрических машин, учитывается коэффициентом Картера. Одако увеличение зазора существенно не влияет на свойства электродвигателя, так как постоянные магниты ротора выполнены из современных сплавов на ос,нове редкоземельных элементов (например Sm и СО5), нечувствительных к BejiH4HHe воздушного зазора, а катушки одной секции, расположенные под разными парами полюсов, соединены последовательно. Для переменного магнитного потока первичной обмотки 9 эквивалентная схема магнитопровода приведена на фиг. 5. Число Z зубцов ротора равно числу полюсов большей высоты, т.е. Р. Эта магнитная цепь идентична магнитной цепи известного бесконтактного индукционного датчика угла. Число и форма пазов и размещение первичной и вторичной обмоток ДП и обмоток СМ для получения необходимого функционального закона изменения ЭДС и тока в обмотках СМ осуществляется известными способами согласно теории электрических-машин и индукционных датчиков типа редуктосин. При этом необхопкьляЛ закон измене ния индуктивных сопротивлений получается подбором величины воздушного зазора и формы зубцов, высота лЬ которых превышает величину воздушного зазора ... a1i hj-li e ij , где h - высота полюса IS (большей высоты); h - высота полюса 14 (мгшой высоты). Напряжения переменного тока с обмоток 12 и 13 фиг. 1) преобразуются в фазочувствительных усилителях-преобразователях б и 7 в напряжения постоянного тока, которые подаются в обмотки 4 и 5 якоря и создают вращающее магнитное попе в расточке статора синхронного двигателя. Взаимодействие этого поля с полем, образуемым постоянными магнитами 2 ротора 3, создает постоянный вращающийся момен электродвигателя. Как и в известном устройстве в качестве вторичных обмоток синуснокосинусного индукционного датчика могут быть использованы обмотки 5 и 4 якоря, идентичные, однако при этом необходимо рг зделять составляющие высокой и низкой частоты с помощью соответствующих фильтрЬв. Для примера рассматривалась работа (ВД) с числом пар полюсов Р 4, однако „в преи лагаемом устройстве число пар полюсов может быть любым. Формула изобретения 1.Вентильный электродвигатель, содержаний ротор, статор с обмоткой якоря, секции которой подключены к выходам фазочувствительных усилителей.преобразователей, вход которых соединен с расположенной на статоре вторичной обмоткой датчика положения рото- . ра, первичная обмотка которого прд:ключена к цепи питания высокой часто ты, отличающийся, тем, что, с целью снижения массы и габаритов, ротор двигателя .выполнен в виде чередующихся магнитомягких полюсов различной высоты, между которыми размещены тангенциально намагниченные постоянные магниты, а первичная обмотка выполнена с шагом, в два раза меньшим шага вторичной обмотки, и расположена на статоре. 2.Электродвигатель по п. 1, о т личающийс я тем, что разность высот соседних полюсов ротора превышает величину воздушного зазора между статором и ротором. Источники информации, псжнятые во внимание при экспертизе 1.Патент США 3667018, кл. 318-138, 1970. 2.Авторское свидетельство СССР 512545, кл, Н 02 К 29/02, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1979 |
|
SU847452A1 |
| Вентильный электродвигатель и способ его настройки | 1989 |
|
SU1772875A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2000 |
|
RU2195066C2 |
| Вентильный электродвигатель | 1985 |
|
SU1427509A1 |
| Моментный вентильный электродвигатель | 1981 |
|
SU995218A1 |
| Вентильный электродвигатель | 1986 |
|
SU1476572A2 |
| Вентильный электродвигатель | 1985 |
|
SU1403268A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2001 |
|
RU2216843C2 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1046864A1 |
| Однофазный вентильный электродвигатель | 1976 |
|
SU657536A1 |
/Д.
П
16
