Изобретение относится к области электротехники, и может быть использовано, например, в системах регулируемого и нерегулируемого электропривода.
Известен вентильный электропривод по патенту РФ 1075901, МПК Н 02 К 29/06, который содержит ротор, статор с обмоткой якоря, секции которого соединены с выходом мостового полупроводникового коммутатора, включающего транзисторы, управляющие электроды которых соединены с выходами датчика положения ротора, а также диодный мост и силовой транзистор.
Недостатком данного технического решения является сложная система запуска электродвигателя в нужном направлении вращения, что уменьшает его надежность.
Известен бесконтактный двигатель постоянного тока патент РФ 2051460, кл. Н 02 К 29/08, согласно которому он содержит ротор с рабочим постоянным магнитом, статор с обмотками, электронный блок управления, датчики положения ротора, функционально связанную с ним магнитную систему с магнитопроводом и вспомогательным магнитом, причем магнитная система датчика положения ротора дополнительно снабжена жестко закрепленной на валу ротора цилиндрической и удлиненной в поперечном сечении полостью, образованной размещенными в корпусе магнитопроводом и вспомогательным магнитом, элементы вспомогательного магнита намагничены в направлении, перпендикулярном полостям элементов магнитопровода, а обойма с датчиками Холла расположена в центральной части полости.
Данное изобретение обладает следующими недостатками. Так как цилиндрический корпус с датчиками положения ротора жестко закреплен на валу, то становится невозможным регулировать угол коммутации обмоток статора, так как при различных режимах нагрузки на валу двигателя величина реакции якоря будет непостоянной и соответственно переменным будет и угол коммутации.
При переменном угле коммутации возникают тормозные моменты, что приводит к потере мощности и снижению КПД. Кроме этого, возможно возникновение режима сквозного тока в силовом инверторе системы управления, что приводит к выходу двигателя из строя.
Известен также вентильный двигатель по патенту РФ 2081497, кл. 6 Н 02 К 2/08, согласно которому он содержит статор с обмотками, ротор и датчики Холла, причем в ярме якоря двигателя выполнены прорези вдоль продольной оси двигателя, в которых размещены элементы датчиков Холла в положении, при котором их плоскости расположены вдоль радиуса двигателя.
Недостатком данной конструкции является то, что размещение датчиков положения ротора в зоне магнитных потоков рассеивания лобовых частей обмоток ведет к тому, что на подводящие провода воздействуют магнитные потоки, которые ведут к возникновению помех и нарушению условий коммутации.
Наиболее близким техническим решением к заявленному является патент ЕР 1003270 А1, Н 02 К 29/08, согласно которому вентильный двигатель содержит ротор с рабочими постоянными магнитами, статор с обмотками якоря и полюсами, датчики положения ротора, магнитная система которых снабжена цилиндрическим корпусом, и функционально связанную систему магнитопроводов и вспомогательных магнитов, причем вспомогательные магниты выполнены в форме сегментов с разрывами и изменением знака намагниченности между сегментами.
Данное устройство имеет следующие недостатки.
Несмотря на то, что вспомогательные магниты выполнены в виде сегментов кольца с разрывами и коммутация секций обмоток статора происходит с временным интервалом, размещение дополнительных магнитов с датчиками положения ротора в зоне действия потоков рассеивания лобовых частей обмоток приводит к тому, что возникающие колебания тока и ЭДС в обмотках статора отрицательно влияют на работу системы управления из-за появления сквозных токов, а это приводит к выходу двигателя из строя. Кроме того, размещение вспомогательных магнитов и датчиков положения ротора во внутренней расточке системы вал-магнит делает конструкцию труднотехнической в изготовлении.
Задачей настоящего изобретения является создание вентильного электродвигателя повышенной надежности и применение его в инструментах и приборах, требующих двигателей как малой, так и большой мощности.
Поставленная задача решается тем, что в вентильном электродвигателе, содержащем ротор с рабочими постоянными магнитами, статор с обмотками якоря и полюсами, датчики положения ротора, магнитная система которых снабжена цилиндрическим корпусом, и функционально связанную систему магнитопроводов и вспомогательных магнитов, причем вспомогательные магниты выполнены в виде сегментов кольца и размещены с разрывами и изменениями знака намагниченности между сегментами, узел датчиков положения ротора и вспомогательные магниты размещены вне зоны действия потоков рассеивания лобовых частей обмоток, а поверхность по крайней мере у одного из полюсов статора выполнена скошенной.
Причем величина разрыва определяется:
где αp - угол разрыва между сегментами вспомогательных магнитов;
μo - магнитная проницаемость воздуха;
N - число витков на одном полюсе статора;
Sпс - сечение полюса статора;
lпс - длина провода обмотки статора;
Sпс - сечение провода обмотки статора;
D - диаметр окружности сегментов вспомогательных магнитов;
n - частота вращения;
ρ - удельное сопротивление обмотки статора;
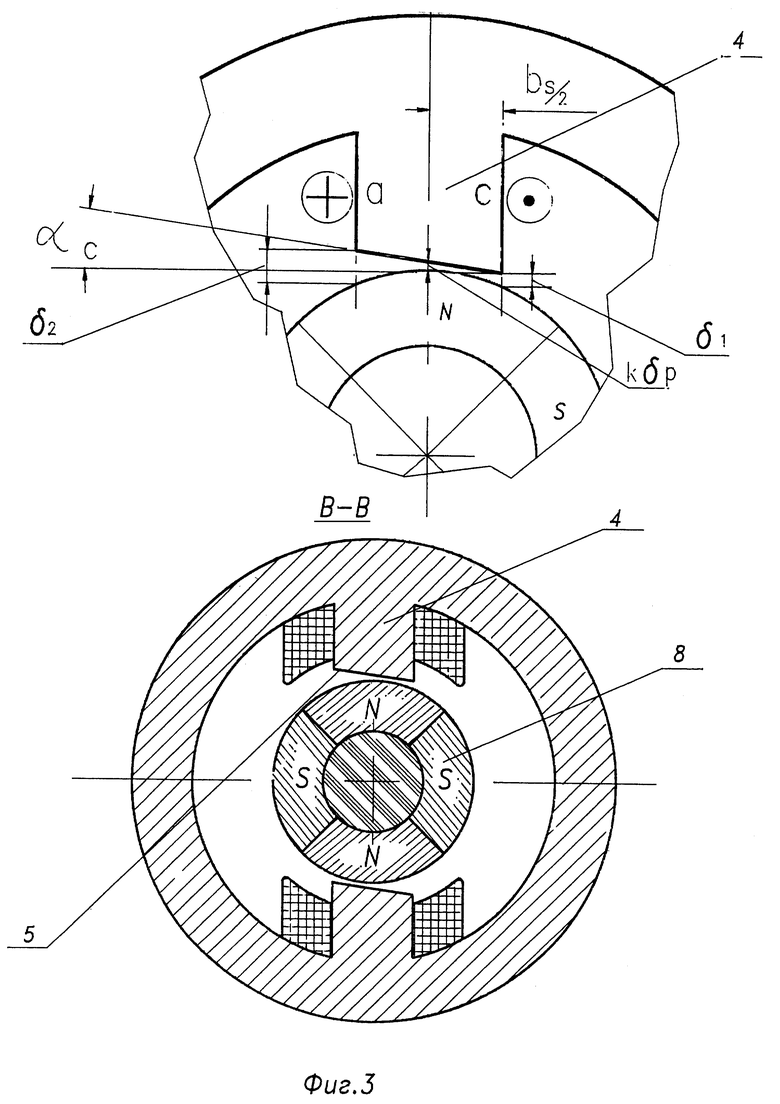
Число пар вспомогательных магнитов ротора соответствует числу пар полюсов ротора, а поверхность не менее одного полюса статора выполнена скошенной, причем угол скоса определяется по формуле:
где αc - угол скоса поверхности полюса;
δp - расчетный коэффициент воздушного зазора;
k - коэффициент пропорциональности воздушного зазора;
bs - ширина полюса.
Благодаря выполнению вспомогательных магнитов системы в виде сегментов кольца и наличию разрывов между ними, а также размещению их с датчиками положения ротора вне зоны влияния потоков рассеивания лобовых частей обмоток процесс коммутации обмоток статора происходит в период временного интервала, пропорционального углу разрыва между сегментами разнополярных магнитов. В период временного интервала датчики положения ротора находятся в зоне, где отсутствует магнитное поле вспомогательных магнитов и влияние потоков рассеивания лобовых частей обмоток, следовательно, отсутствует сигнал с датчика положения ротора и на этот период обмотка статора отключается от блока системы управления, то есть возникает пауза в работе блока системы управления, пока не закончатся переходные процессы в обмотках статора. При этом ввиду отсутствия влияния потоков рассеивания лобовых частей обмоток на переходные процессы исключается влияние переходных процессов на систему управления, что предотвращает появление сквозных токов, могущих вывести двигатель из строя.
Выполнение поверхности по крайней мере одного полюса статора скошенной обеспечивает создание вращающего момента всегда одного направления. Благодаря этому отпадает необходимость установки дополнительных датчиков положения ротора, что упрощает схему и предотвращает накопление дополнительных ошибок, а следовательно, повышает надежность двигателя. Кроме этого, выполнение основания полюса скошенным устраняет так называемый эффект "залипания" ротора, присущий вентильным двигателям.
Формула определения разрыва между вспомогательными магнитами определена экспериментальным путем и определяется следующим образом:
αp=V•t,
где αp - угол разрыва между сегментами вспомогательных магнитов;
V - линейная скорость ротора в точке расчетного воздушного зазора;
t - время, в течение которого заканчиваются переходные процессы в обмотке статора, при этом
где Lя - индуктивность обмотки статора;
Rя - омическое сопротивление обмотки статора, при этом:

где μo - магнитная проницаемость воздуха;
N - число витков на одном полюсе статора;
ρпc - сечение полюса статора;
hc - высота полюса статора по вертикальному сечению по центру его ширины;
ρ - удельное сопротивление обмотки статора;
lпр - длина провода обмотки статора;
Sпр - сечение провода обмотки статора.

где V - линейная скорость ротора в точке расчетного воздушного зазора;
D - диаметр окружности расположения сегментов вспомогательных магнитов;
n - частота вращения.
Таким образом:
Угол скоса основания полюса статора также определен методом эксперимента и рассчитывается:
где αc - угол скоса поверхности полюса;
δp - расчетный коэффициент воздушного зазора;
k - коэффициент пропорциональности воздушного зазора, для двигателей мощностью до 5 кВт его величина равна 3-3,5;
bs - ширина полюса.
Учитывая, что
Отсюда
Таким образом, исходя из вышеизложенного, новые признаки изобретения позволяют повысить надежность двигателя. И таким образом предлагаемое изобретение соответствует критерию "изобретательский уровень".
Изобретение поясняется на чертежах, где
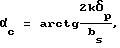
на фиг.1 показан вентильный электродвигатель в продольном сечении;
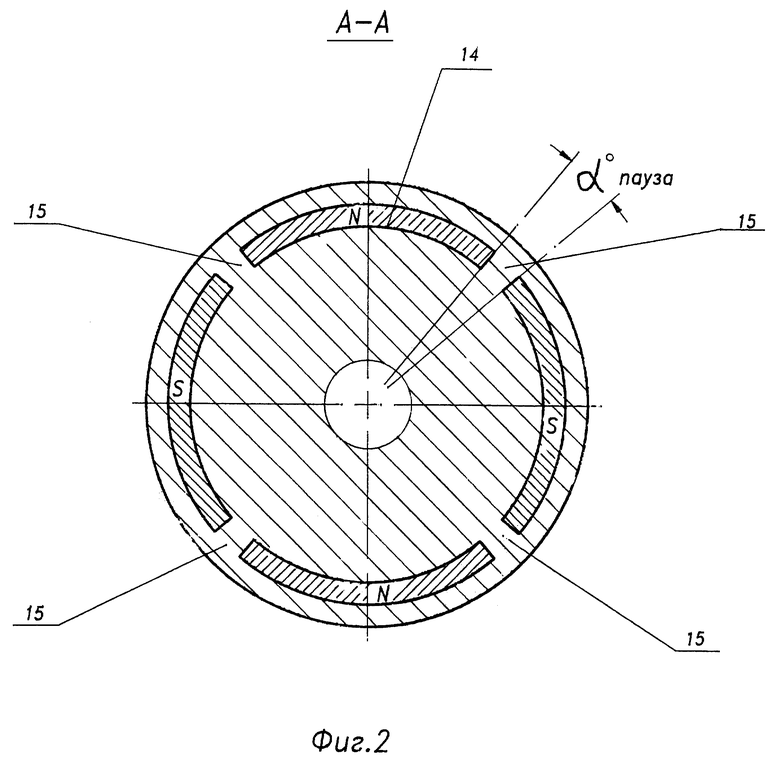
на фиг.2 - вид вспомогательных магнитов магнитопровода по А-А;
на фиг.3 - вид полюсов статора ротора по Б-Б.
Вентильный двигатель состоит из корпуса 1, в котором размещен статор 2. В пазах статора 2 размещены обмотки 3, а полюса 4 выполнены со скошенной поверхностью 5. На валу 6 установлен ротор 7 с постоянными магнитами 8. Корпус 1 с двух сторон состыкован с двумя передним 9 и задним 10 подшипниковыми щитами. К корпусу 1 прикреплена цилиндрическая обойма 11, на которой вне зоны влияния потоков рассеивания лобовых частей обмоток 3 закреплены узел датчика 12 ротора 7. На валу 6 двигателя также вне зоны влияния потоков рассеивания лобовых частей обмоток 3 установлены вспомогательные магниты 13, которые выполнены в виде сегментов кольца 14, с разрывами 15 между ними и изменением знака намагниченности между сегментами 14. Число пар полюсов вспомогательных магнитов 13 соответствует числу пар полюсов ротора 7. Между задним подшипниковым щитом 10 и цилиндрической обоймой 11 размещен блок управления 16, который включает силовой модуль 17 и блок логики 18. Силовой модуль 17 состоит из звена предварительного выпрямления, инвертора и датчика тока (на чертеже не показаны).
Блок логики 18 состоит из вторичного источника питания и формирователя сигналов (на чертеже не показаны).
Работа вентильного электродвигателя осуществляется следующим образом.
При подаче напряжения в блок логики 18 подготавливается цепь питания обмоток 3 статора 2 и напряжение подается на узел датчика положения 12 ротора 7. Из узла датчиков положения 12, в блок логики 18 поступает соответствующий сигнал, блок логики 18 подключает обмотки 3 статора 2 к напряжению сети. По обмоткам 3 статора 2 начинает протекать ток.
Протекающий по обмоткам 3 статора 2 ток взаимодействует с магнитным полем магнитов ротора 7. Возникает вращающий момент, так как полюса 4 статора 2 выполнены со скошенной поверхностью 5, между ротором 7 и основанием 5 образуется зазор в виде угла и независимо от положения ротора 7 относительно обмоток 3 статора 2, и, следовательно, независимо от направления тока в обмотках 3 статора 2 возникает вращающий момент всегда одного направления. При этом вращающий момент определяется выражением:
Mвр=M1-M2,
где Mвр - момент вращения;
M1 - среднее значение момента в точке С;
М2 - среднее значение момента в точке А;
Выражая значение моментов M1 и М2 через параметры двигателя получим
где  - магнитные напряжения воздушных зазоров между скошенным полюсом статора и ротора;
- магнитные напряжения воздушных зазоров между скошенным полюсом статора и ротора;
δ1, δ2 - соответственно воздушные зазоры между набегающим и сбегающим краями полюса и ротором;
lпр - активная длина провода в пазу статора;
iпр - ток протекающий по обмоткам статора;
τ - полюсное деление
p - число пар полюсов статора;
N - число проводников в пазу статора.
Из формулы видно, что вращающий момент будет всегда одного направления. Ротор 7 начинает вращаться, вместе с ним вращается диск 13 со вспомогательным магнитами 14, создавая разнопеременное магнитное поле в зоне датчиков положения 12 ротора 7.
При подходе очередного из вспомогательных магнитов 14 к датчику положения 12 ротора 7, а следовательно, магнита ротора 7 вентильного электродвигателя к полюсу 4 статора 2, датчик положения 12 ротора 7 через блок логики 18, производит переключение тока в обмотках 3 статора 2, изменяя его направление. Благодаря наличию разрыва между вспомогательными магнитами 14, переключение тока в обмотках 3 статора 2 происходит в интервал времени, равный времени переходного процесса в обмотках 3 статора 2. Таким образом, на время, пропорциональное этому интервалу, соответственно времени колебаний тока и ЭДС в обмотках 3 статора 2, обмотки 3 оказываются отключенными от блока логики 18, не оказывая собственно влияния на его работу. При изменении нагрузки на валу 6 двигателя за счет реакции якоря меняется угол коммутации обмоток 3 статора 2. Однако благодаря наличию временного интервала и вследствие того, что вспомогательные магниты 14 и датчики 12 положения ротора 7 вынесены из зоны действия магнитных потоков рассеивания лобовых частей обмоток, реакция якоря и изменяющееся во времени и в пространстве магнитное поле потоков рассеивания лобовых частей обмоток статора 2 не оказывают отрицательного влияния на работу вспомогательных магнитов 14, датчиков 12 положения ротора 7, а также на работу блока логики 18 в целом, и следовательно, на электромагнитную мощность двигателя. Это обеспечивает надежную работу на всех режимах работы вентильного электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧНАЯ ШЛИФОВАЛЬНАЯ МАШИНА (ВАРИАНТЫ) | 2000 |
|
RU2172665C1 |
| Вентильный электродвигатель и способ его настройки | 1989 |
|
SU1772875A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ПОСТОЯННЫМИ МАГНИТАМИ | 2008 |
|
RU2375807C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2001 |
|
RU2216843C2 |
| Электромеханический преобразователь моментного вентильного электродвигателя | 1989 |
|
SU1702493A1 |
| ДИСКОВОЕ УНИВЕРСАЛЬНОЕ МОТОР-КОЛЕСО СМИРНОВА | 1995 |
|
RU2129964C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| МОДУЛЬНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ (МВЭП) | 2006 |
|
RU2310966C1 |
| ОДНОФАЗНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2010 |
|
RU2453968C2 |
| Вентильный электродвигатель | 1981 |
|
SU964884A1 |
Изобретение относится к электротехнике и может быть использовано, например, в системах регулируемого и нерегулируемого электроприводов. Вентильный электродвигатель содержит ротор с рабочими постоянными магнитами, статор с обмотками и полюсами, датчики положения ротора, магнитная система которых снабжена цилиндрическим корпусом, и функционально связанную с ротором систему магнитопроводов и вспомогательных магнитов, причем вспомогательные магниты выполнены в форме сегментов кольца и размещены с разрывами и с изменением знака намагниченности между сегментами. При этом согласно изобретению по крайней мере один из полюсов статора выполнен с углом скоса, определяемым как 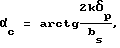 где αc - угол скоса, δp - расчетный коэффициент воздушного зазора, k - коэффициент пропорциональности воздушного зазора, bs - ширина полюса. Технический результат состоит в повышении надежности вентильного двигателя и в обеспечении возможности его применения в инструментах и приборах, требующих использования электродвигателей как малой, так и большой мощности. 1 з.п.ф-лы, 3 ил.
где αc - угол скоса, δp - расчетный коэффициент воздушного зазора, k - коэффициент пропорциональности воздушного зазора, bs - ширина полюса. Технический результат состоит в повышении надежности вентильного двигателя и в обеспечении возможности его применения в инструментах и приборах, требующих использования электродвигателей как малой, так и большой мощности. 1 з.п.ф-лы, 3 ил.
где αc - угол скоса;
δp - расчетный коэффициент воздушного зазора;
k - коэффициент пропорциональности воздушного зазора;
bs - ширина полюса.
где αp - угол разрыва между сегментами вспомогательных магнитов;
D - диаметр окружности сегментов вспомогательных магнитов;
n - частота вращения;
μo - магнитная проницаемость воздуха;
N - число витков обмотки на одном полюсе статора;
Snc - сечение полюса статора;
ρ - удельное сопротивление обмотки статора;
lnp - длина провода обмотки статора;
Snp - сечение провода обмотки статора.
| Тиристорный регулятор секционированной нагрузки | 1981 |
|
SU1003270A1 |
| Вентильный электродвигатель | 1989 |
|
SU1676020A1 |
| Вентильный электродвигатель | 1982 |
|
SU1062830A1 |
| Датчик положения ротора вентильного электродвигателя | 1985 |
|
SU1372514A1 |
| US 3617841 А, 02.11.1971 | |||
| Способ обработки осадка сточных вод | 1975 |
|
SU549429A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ОТЛИВОК В ПРОИЗВОДСТВЕ литья по ПЕНОПОЛИСТИРОЛОВЫМ МОДЕЛЯМ | 0 |
|
SU336078A1 |

