Изобретение относится к электрическим машинам, а именно к электрическим двигателям с бесконтактной ко 1утацией, осуществляемой с помощью полупроводниковых приборов, и предназначено для использования, преимущественно в электрических машинах, работающих в качестве моментных двигателей приводов следящих систем и сис.тем стабилизации объектов различного назначения.
Известен моментный вентильный электродвигатель (ВД), содержащий синхронную машину, датчик положения ротора (ДПР) и электронный коммутатор, в котором коммутация обмоток якоря осуществляется дискретно по сигналам ДПРС дросселями насыщения 1.
Недостатком такого моментного двигателя является пу.пьсация вращающего момента от угла поворота ротора, вызванная дискретностью коммутации обмоток якоря.
Известен также бесконтактный моментный БД, в котором с целью уменьшения пульсации, вращающего момента с ротором синхронного двигателя связан специальный, однофазный электромеханический корректор 2.
Недостатками этого устройства являются сложность и бо.пьшой вес, вызванные наличием дополнительной электрической машины - электромеханического корректора.
Наиболее близким к предлагаемому является бесконтактный моментный ВД с непрерывной коммутацией 3.
Известный моментный ВД содержит
10 синхронную машину с постоянными магнитами на роторе и обмотку якоря, секции которой расположенные на статоре/ подключены ц выходам усилителей мощности, входы которых соединены с вы15ходом синусно-косинусного датчика положения ротора, выполненным, например, в виде вращающегося синусно-косинусного трансформатора с фазочувствительньми выпрямителями на{выходах.
20 Цепь питания связана с источником управляющего напряжения;
Недостатком известного моментного ВД является непостоянство (пульсация) вращающего мсмента по углу поворота
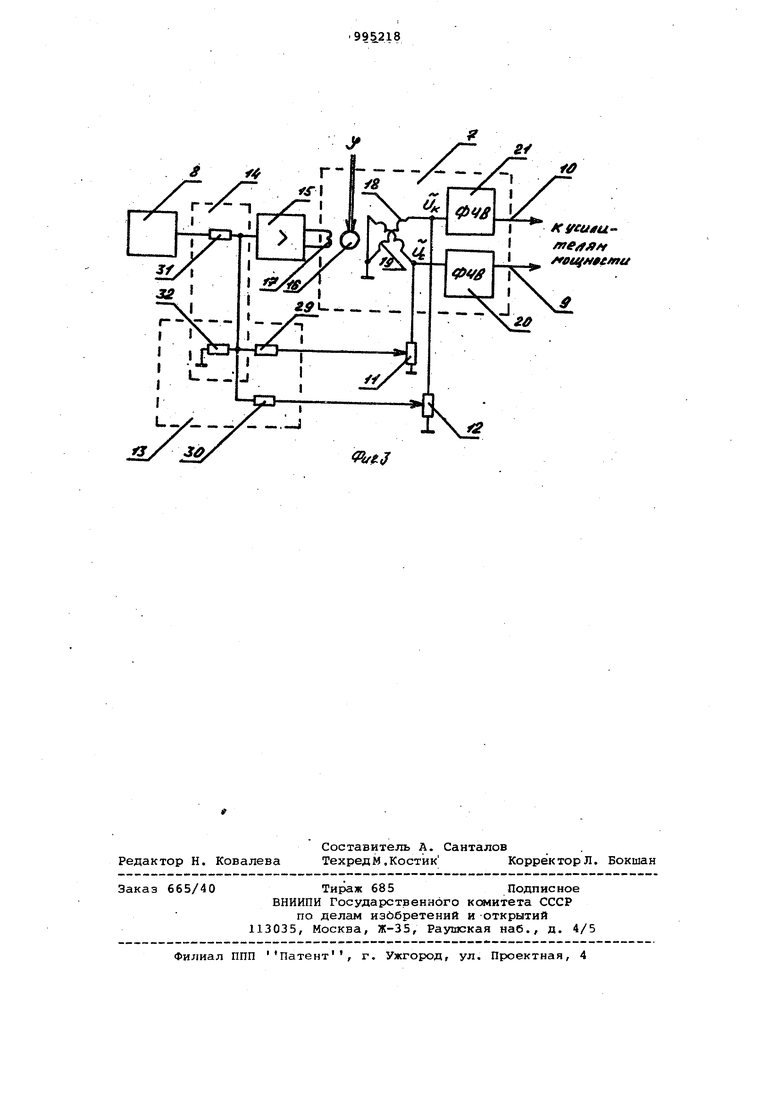
25 ротора. Как известно, в бесконтактном двигателе постоянного тока с непрерывной коммутацией (управлением) вращающееся магнитное поле статора теоретически является круговьм, т.е.
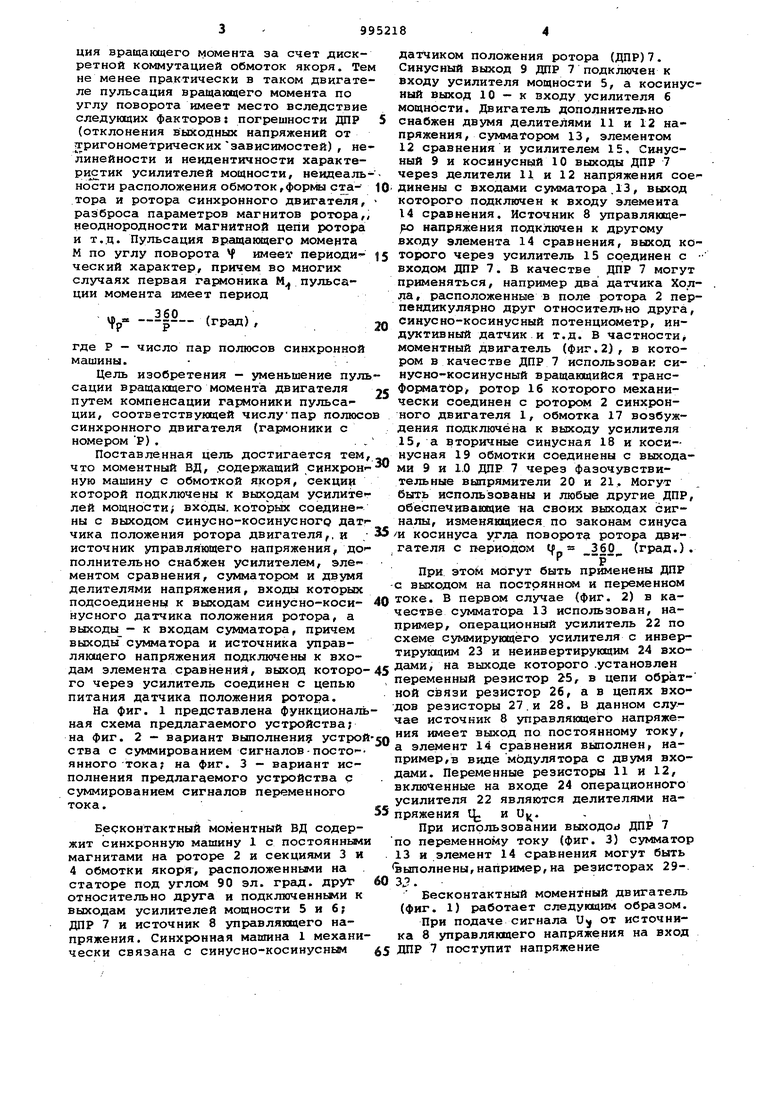
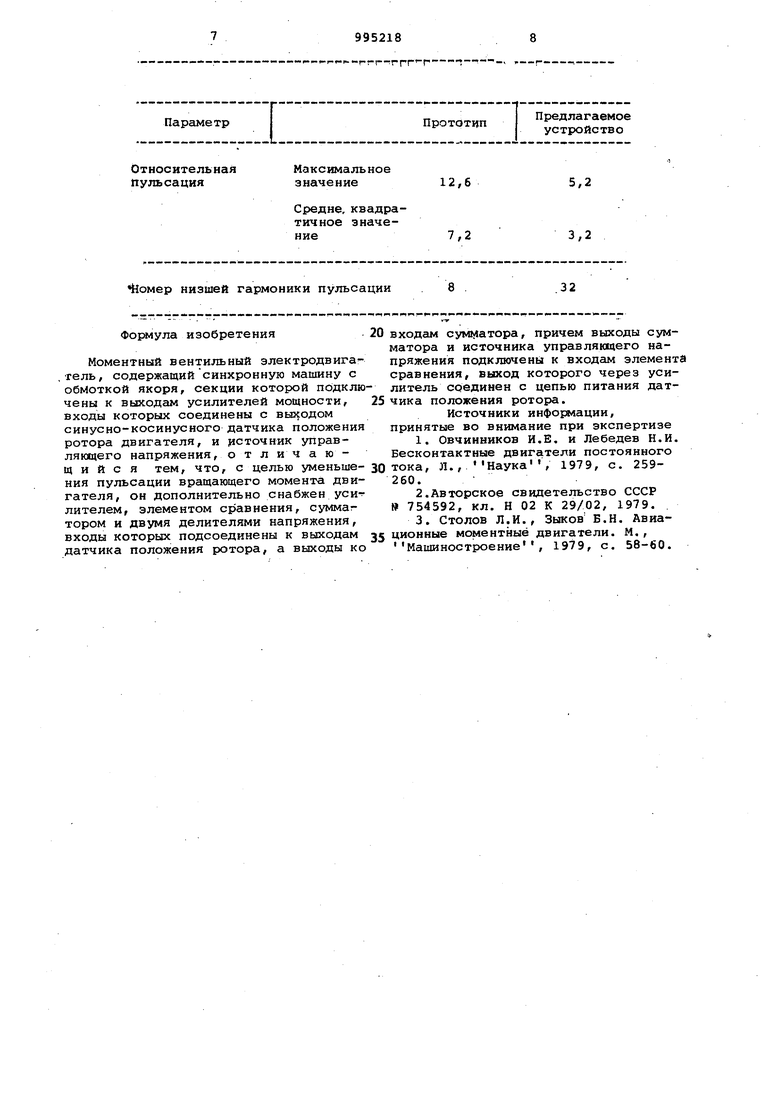
30 в таком двигателе отсутствуют пульсация вращающего момента за счет дискретной коммутацией обмоток якоря. Те не менее практически в таком двигате ле пульсация вращающего момента по углу поворота имеет место вследствие следующих факторов: погрешности ДПР (отклонения выходных напряжений от тригонометрическихзависимостей), не линейности и неидентичности характеристик усилителей мощности, неидеаль ности расположения обмоток,форкы статора и ротора синхронного двигателя, разброса параметров магнитов ротора, неоднородности магнитной цепи ротора и т.д. Пульсация вращакяцего момента М по углу поворота Ч имеет перйоди ческий характер, причем во многих случаях первая гармоника М пульсации момента имеет период (град), где Р - число пар полюсов синхронной машины. Цель изобретения - уменьшение пуль сации вращающего момента двигателя путем компенсации гармоники пульсации, соответствующей числу пар полюс синхронного двигателя (гармоники с номером Р) .. Поставленная цель достигается тем что моментный ВД, .содержащий синхронную машину с обмоткой якоря, секции которой подключены к выходам усилителей мощности входы, которых соединены с выходом синусно-косинусного датчика положения ротора двигателя,, и ; источник управляющего напряжения дополнительно снабжен усилителем, элементом сравнения, сумматором и двумя делителями напряжения, входы которых подсоединены к выходам синусно-косинусного датчика положения ротора, а выходы - к входам сумматора, причем выходы сумматора и источника управляющего напряжения подключены к входам элемента сравнения, выход которого через усилитель соединен с цепью питания датчика положения ротора. На фиг. 1 представлена функциональ ная схема предлагаемого устройства; на фиг. 2 - вариант выполнени устрой ства с суммированием сигналов-постоянного тока; на фиг. 3 - вариант исполнения предлагаемого устройства с суммированием сигналов переменного тока. Бесконтактный моментный ВД содержит синхронную машину 1 с постоянным магнитами на роторе 2 и секциями 3 и 4 обмотки якоря, расположенными на статоре под углом 90 эл. град, друг относительно друга и подключенньми к выходам усилителей мощности 5 и б; ДПР 7 и источник 8 управляющего напряжения. Синхронная машина 1 механи чески связана с синусно-косинусным датчиком положения ротора (ДПР)7. Синусный выход 9 ДПР 7 подключен к входу усилителя мощности 5, а косинусный выход 10 - к входу усилителя 6 мощности. Двигатель дополнительно снабжен двумя делителями 11 и 12 напряжения, сумматором 13, элементом 12сравнения и усилителем 15, Сянусный 9 и косинусный 10 выходы ДПР 7 через делители 11 и 12 напряжения соединены с входами сумматора.13, выход которого подключен к входу элемента 14 сравнения. Источник 8 управляющеfio напряжения подключен к другому входу элемента 14 сравнения, выход которого через усилитель 15 соединен с входом ДПР 7. В качестве ДПР 7 могут применяться, например два датчика Холла, расположенные в поле ротора 2 перпендикулярно друг относительно друга, синусно-косинусный потенциометр, индуктивный датчик.и т.д. В частностиj моментный двигатель (фиг.2), в котором в качестве ДПР 7 использован си- . нусно-косинусный вращающийся трансфО 4атйр ротор 16 которого механически соединен с ротором 2 синхронного двигателя 1, обмотка 17 возбуждения подключена к выходу усилителя 15, а вторичные синусная 18 и косинусная 19 обмотки соединены с выходами 9 и 1.0 ДПР 7 через фазочувствительные выпрямители 20 и 21. Могут быть использованы и любые другие ДПР, обеспечивающие на своих выходах сигналы, изменяющиеся по законам синуса и косинуса угла поворота ротора двигателя с периодом t| 360 (град.). Р - При этой могут быть применены ДПР с выходом на постоянно и переменном токе. В первом случае (фиг. 2) в качестве сумматора 13 использован, например, операционный усилитель 22 по схеме суммирующего усилителя с инвертирующим 23 и неинвертирующим 24 входами, на выходе которого .установлен переменный резистор 25, в цепи обратной связи резистор 26, а в цепях входов резисторы 27.и 28. В данном случае источник 8 управляющего напряжения имеет выход по постоянному току, а элемент 14 сравнения выполнен, например, в виде мЬдулятора с двумя входами. Переменные резисторы 11 и 12, включенные на входе 24 операционного усилителя 22 являются делителями напряжения Ц, и U)j. При использовании выходов ДПР 7 по переменному току (фиг. 3) сумматор 13и элемент 14 срав нения могут быть выполнены,например,на резисторах 29 Бесконтактный моментный двигате.пь (фиг. 1) работает следующим образом. При подаче сигнала U от источника 8 управлякмего напряжения на вход ДПР 7 поступит напряжение иа--К,,Ц-.К,,.), (1) где К - коэффициент усиления усил теля 15. При этом сигналы на выходах 9 и 10 ДПР 7 будут, соответственно равны Uc-MuS wP , UK UBCOTP , где Kg - коэффицйе{ т передачи (тра формации) ДРП 7; Р - число пар полюсов синхрон ного двигателя 1, равнре числу пар полюсов дпр 7. Сигнал на выходе сумматора 13 ра Vb c Р +К соврЧ W где Kj, и К. - коэффициенты передач делителей 11 и 12 на пряжения соответстве но (с учётом суммато 13). (3) можно с учетом изв Выражение ных законов тригонометрии представи в виде K U siMpH,), (4) К г- к|йс| 0,Qrcie--. Тогда, с учетом (1) получго f Opi J . u 3 II Vг,л.л , чЬ -t K jK U si pW+UU) Вращающий момент двигателя, как известно, равенM-K Uft, где К - коэффициент передачи двиг теля по моменту. При наличии пульсации вращающего момента это выражение примет вид ; ,1ИрСЧ -ф)Зив, (6 ) где К -jj- - коэффициент передач , В двигателя по средне му вращающему момен ту у 0-1;- относительная пульс ция вращающего момента. Выражение (6) получено с учетом только первой гармоники пульсадии момента с периодом fp , которая, ка отме;чалось выше, вносит наибольшую долю в общую пульсацию. Подставляя выражение (5) в (6), получим вращающий момент предлагаем го двигателя / . oblHcf siHpm) . . 5i«pW4 J i) - ; Если выбрать коэффициенты переда чи делителей 11 и 12 из условий ЦЬ r-arciQ- - J),j(8) K --VKj.K то,как видно из (7), вращающий момент предлагаемого двигателя не будет зависеть от угла поворота ГЛ-КоКч,и,,. ($) Выполне ие условий (8) достигается подбором делителей 11 и 12 напряжения. При необходимости изменения (козффициенты Кс и Кк могут быть отрицательными) делители 11 и 12 напряжений (фиг. 2) могут, быть подключены к инвертирующему вхбду 23 операционного усилителя 22, либо же могут быть соответствующим образом подобраны фазы несущей частоты сигналов UQ и и (Фиг. 3) . Внедрение изобретения уменьшает пульсацию вращающего момента за счет компенсации гармоники пульсации момента за счет компенсации гармбники. пульсации момента с номером Р. В таблице приведены результаты экспериментальных исследований макета моментного двигателя, выполненного на двухфазном 16 полюсном моментном двигателе типа ДМВ-2,5-2 с постоянными магнитами на роторе и гладким статором (пусковой момент двигателя 2,5 Нм при напряжении 27 В). Двигатель испытывают по схеме фиг.. 2 с ДПР на базе бесконтактного вращающегося трансформатора типа 2,5 . Измерения проводят при среднем вращающем моменте по валу двигателя 0,4 Нм при угле поворота О - 360°. . Как видно из таблицы применение предлагаемого устройства по сравнению с известный позволяет более чем вдвое снизить пульсацию вращающего момента. Следовательно, при использовании1предлагаемого моментного двигателя в сле-дящей системе или системе .угловой стабилизации повышается точность этой системы, так как моментная ошибка за счет пульсации момента понизится более чем в 2 раза. Кроме того, в безредукторных системах угловой стабилизации повышается частота пульсации вращающего момента (после компенсации гармоники с номером Р остаются высшие гармоники), так как известно, что безредукторные системы стабилизации лучше фильтруют высокочастотные возн щения, чем низкочастотные. Параметр ОтносительнаяМаксимальное Пульсациязначение Средне, квадратичное значение
-гт-г-гггг ПрототипПредлагаемое устройство 12,65,2 7,23,2
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ настройки моментного вентильного электродвигателя | 1981 |
|
SU1008857A1 |
| Способ настройки вентильного электродвигателя | 1987 |
|
SU1436213A1 |
| Способ настройки моментного вентильного электродвигателя | 1985 |
|
SU1288833A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1985 |
|
SU1275678A1 |
| Способ настройки моментного вентильного электродвигателя | 1987 |
|
SU1495944A1 |
| Способ настройки вентильного электродвигателя | 1989 |
|
SU1742951A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| Способ настройки моментного вентильного электродвигателя | 1985 |
|
SU1275677A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1046864A1 |

Йомер низшей гармоники пульсации832
Формула изобретения20 входам сумматора, причем выходы сумМоментный вентильный электродвига- пряжения подключены к входам элемента ,гель, содержащий синхронную машину с сравнения, выход которого через усиобмоткой якоря, секции которой подклю- литель соединен с цепью питания датчены к выходам усилителей мощности, 25 чика положения ротора. входы которых соединены с выходомИсточники информации,
синусно-косинусного датчика положения принятые во внимание при экспертизе ротора двигателя, и источник управ-1. Овчинников И.Е. и Лебедев Н.И.
ляющего напряжения, о т л и ч а ю -Бесконтактные двигатели постоянного
щ и и с я тем, что, с целью уменьше- ЗО тока, Л., Наука, 1979, с, 259ния пульсации вращающего момента дви- 260.
гателя, он дополнительно снабжен .Авторское свидетельство СССР
лителем, элементом сравнения, суммаг- 754592, кл. Н 02 К 29/02, 1979. тором и двумя делителями напряжения,3. Столов Л.И., Зыков Б.Н. Авиавходы которых подсоединены к выходам 35 ционные моментныё двигатели. М., датчика положения ротора, а выходы ко Машиностроение, 1979, с. 58-60.
матора и источника управляющего . лгуа/ mt rjfft/№лут€а и /f/ f(y UfUatf ft
