(54) РЕЛЕЙНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейная система автоматического регулирования | 1981 |
|
SU974335A1 |
| Релейная система регулирования | 1980 |
|
SU953624A1 |
| Релейная система регулирования | 1978 |
|
SU702345A1 |
| Релейный регулятор | 1979 |
|
SU794613A1 |
| Релейная система регулирования | 1978 |
|
SU802919A1 |
| Релейный регулятор | 1977 |
|
SU661502A1 |
| Двухканальный релейный регулятор | 1979 |
|
SU794612A1 |
| Релейная система регулирования | 1980 |
|
SU953623A2 |
| Релейный регулятор | 1976 |
|
SU697971A1 |
| Устройство для регулирования процесса термообработки движущегося материала | 1977 |
|
SU721807A1 |
- Изобретение относится к технике автоматического регулирования и может быть использовано, например в оборудовании дня автопилотнрования ле.тательных аппаратов.
По основному авт. св. № 802919 известна релейная система регулирования, содержащая частотомер, задатчик регулируемого параметра, интегратор, последовательно соединенные первый задатчик уровня, реле, второй фильтр и исполнителЫ{ый блок, выход которого соеди- иен со входом объекта регулирования, к выходу которого подключены последовательно соединенные датчик обратной связи, блок сравнения, первый фильтр, первый усилитель с переменным коэффициентом и первый сумматор, Ьыход которого соединен со вторым входом реле, второй вход первого сумматора через интегратор присоединен к выходу первого фильтра и ко входу частотомера, выход которого подключен ко второму входу первого усилителя с переменным коэффициентом, выход задатчика регулируемого параметра подключен ко второму входу блока сравнения 1.
j Недостатком известной релейной системы регулирования является ограниченность ее функциональных возможностей прн изменении в широком диапазоне коэффициента передачи лннейного объекта регулирования. Это вызвано наличием зоны нечувствительности у реле, нелинейных искажений в звеньях системы и др.
Цель изобретения - расишренне функциональных возможностей релейной системы ре10гулирования.
Цель достигается тем, что релейная система регулирования дополнительно содержит первый функциональный преобразователь, первый индикатор, последовательно соединенные втЬрой
15 задатчик уровня, первый элемент сравнения второй сумматор, второй усилитель с пере- менным коэффициентом и второй индикатор, псхледовательно соединенные третий задатчик уровня, второй элемент сравнения и второй
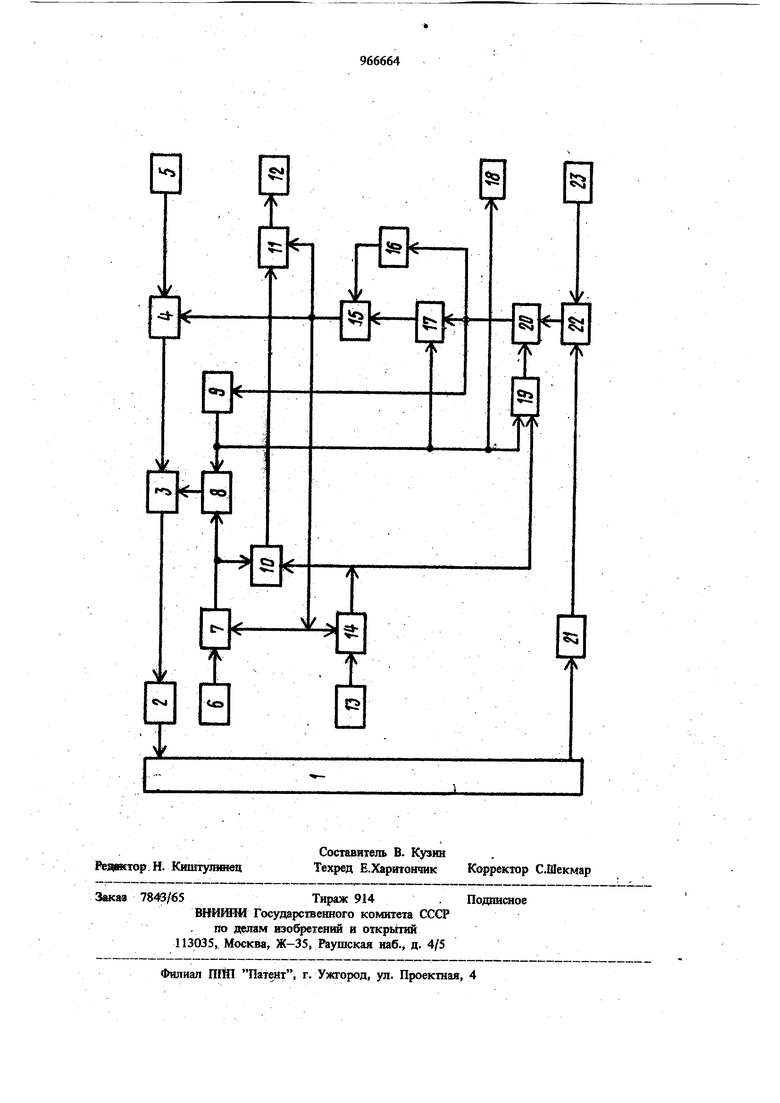
20 функциональный преобразователь, выход частотомера соединен со входом первого индикатора, со вторым входом второго функци|0нального преобразователя и с первым вхо39дом первого функционального преобразователя, второй вход которого подключен к выходу первого элемента сравнения, а выход ко второму входу второго фильтра, второй вход реле соединен со вторыми входами первого и второго элементов сравнения и второго усилителя с переменным коэффициентом, выход второго функционального преобразователя подключен ко второму входу первого фильтра, второй вход второго сумматора соединен с выходом второго/элемента сравнения. На чертеже приведена структурная схема релейной системы регутшрования. Релейная система регулирования содержит объект регулирования (например, летательный аппарат) 1, исполнительный блок (например, рулевая машина) 2, второй фильтр (например, на операционном усилителе) 3, реле 4, первый задатчик 5 уровня, второй задатчик 6 уровня, первьш элемент сравнения (йапример, пороговый элемент и операционный усилитель) 7, первый функциональный преобразователь (например, на операционном усилителе) 8, частотомер 9, второй сумматор (например, переключшощее устройство и о ерациошшй усилитель) ,10, второй усилитель П с переменным коэффициентом (например, на операционном усилятел, второй индикатор 12 третий задатчик 13 уровня, второй элемент сравнения (например, пороговый элемент и операционный усилитель) 14, первьщ сумматор 15, интегратор 16, первый усилитель 17 с переменш м коэффициентом (например на операционном усилителе), первый иидикатор 18, второй фу1йсциональнь1Й преобрмователь (например, на операционном усилителе) 19, первый фильтр 20, датчик 21 обратной связи (например, угловой скорости), блок сравнения 22 и задатчик 23 регулируемого параметра. Система работает следующим образом. Ряупирующее воздействие на объект 1 осу ществляет исполнительньш блок 2 в соответртвии с сигналами, поступающими иа его вхо через второй фильтр 3 с сигнального и управ ляющего входов реле 4. На сигнальный вход реле 4 поступает сигнал с первого задатчика 5 уровня. На управляющий вход реле 4 посту пает сигнал с блока .сравнения 22 после прео разования в первом фильтре 20, в первом усилителе 17 с переменным коэффициентом и в первом сумматоре 15. Сигнал в блоке сравнения 22 формируется в виде сротиошеИия или разности сигналов с датчика 21 обратной связи и задатчика 23 регулируемого параметра. Автоколебания системы линеаризуют характеристику реле 4. В релейной системе, работающей в автоколебательном режиме, обеспечиваются условия неизменности ее общего коэффициента передачи. Поэтому сигнал с частотомера 9 не будет зависеть от коэффициента передачи объекта регулирования 1. Информация с частотомера 9 используется для корректирования первого усилителя 17 с переменным коэффициентом, т.е. постоянной времени фильтра из параллельно соединенных усилителя 17 и интегратора 16. Таким образом, в системе обеспечиваются условия инвариантности к изменению двух параметров объекта регулирования 1, причем одним из этих параметров является коэффи.циент передачи. Указанное свойство позволяет зафиксировать с помощью первого 18 и второго 12 индикаторов- информацию соответственно о постоянной времени (или нескольких параметрах) и коэффициенте передачи линейного объекта регулирования 1. Расширение ф}шкциональных возможностей системы в пгароком диапазоне изменения параметровобъекта 1 достигается за счет устранения зоны не ошствительности реле 4 и нелинейных искаже11ий в звеньях системы. Для этого уровни сигналов со второго 6 и третьего 13 задатчиков соотеетствуют максимально и ушяимальио допустимой амплитуде колебаний иа управляющем входе реле 4. Сигналы с первого 7 и второго 14 элементов сравнения образуются только при амплитуде колебаний на управляющем входе реяе 4 соответственно вь1ще максимально доityCTHMoro и ниже минимально допустимого Зфовия. Это достигается например, с помощью пороговых элементов, размещенных в элементах сравнения 7 и 14. Сигналами, сформированными в первом 8 и втором 19 функциональных преобразователях в виде соотнощения сигналов с частотомера 9нс элемента сравнения 7 или 14, корректир)тотся коэффициенты передачи соответственно второго 3 и первого 20 фильтров. Алгоритм коррекции этих фильтров может выбираться, например, из условия обеспечения максимальной амплитуды колебаний на управляющем входе реле 4 - при текущем значении этой амшштудаг выще максимально допустимого уровня, и из условия обеспечения минимальной амплитуды колебаний на управляющем входе реле 4 - при текущем зиачении этой амплитуды ниже минимально допустимого уровня. За счет коррекции второго усилителя 11 с переменным коэффициентом удается выделить информацию только о коэффициенте передачи объекта регулирования 1. Это реализуется, например, путем использования сигналов противоположного знака с элементов 5 сравнения 7 и 14, а также введення этих сигналов в соответствии с юс нолярностью через переключающее устройство, размещенное во втором сумматоре 10. С помощью фильтра 20 дополнительно обеспечивается требуемая амплитуда колебаний на управляющем входе реле 4. Таким образом, в предлагаемой системе обеспечиваются условия инвариантности системы к изменению в широком даапазоне двух параметров линейного объекта регулирования. Этим самым, например, улучшаются технико-экономические показатели средств автопилотирования. Форму л а изобретения Релейная система регулирования iro авт. св. N802919, отличающаяся тем, что, с целью расширения функциональн бозможностей, она дополнительно содерхост первый функциональный прздбразователь, п вый индикатор, последовательно соединенны второй задатчик . уровня, первый элемент сравнения, второй сумматор, второй усилитель с переменным коэффициентом к второй индикатор, последовательно соединенные третий эадатчик уровня, второй элемент, сравнения и второй функциональный преобразователь, выход частотомера соединен со входом первого индикатора, со вторым входом второго функционального преобразователя и с первым входом первого функционального преобразователя, второй вход которого подключен к выходу первого элемента сравнения, а выход - ко второму входу второго фильтра, второй вход реле соединен со вторыми- входами первого и второго элементов сравненяя и второго усшпоеля с.перемешшм коэффициентом, выход второго фушащонального преобразователя подключи ко второму входу первого. фильтра, второй вход второго сумматора соединен с вЬпюдом второго элемента сравнешя. Историки информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 802919, кл. G 05 В 11/16, 1981 (прототип).
«м
«еЧ
Т
/
ч/
«м
5ч
/V
