(54) ДИФФЕРЕНЦИАЛЬНЫЙ ИНДУКТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕП ЕНИЯ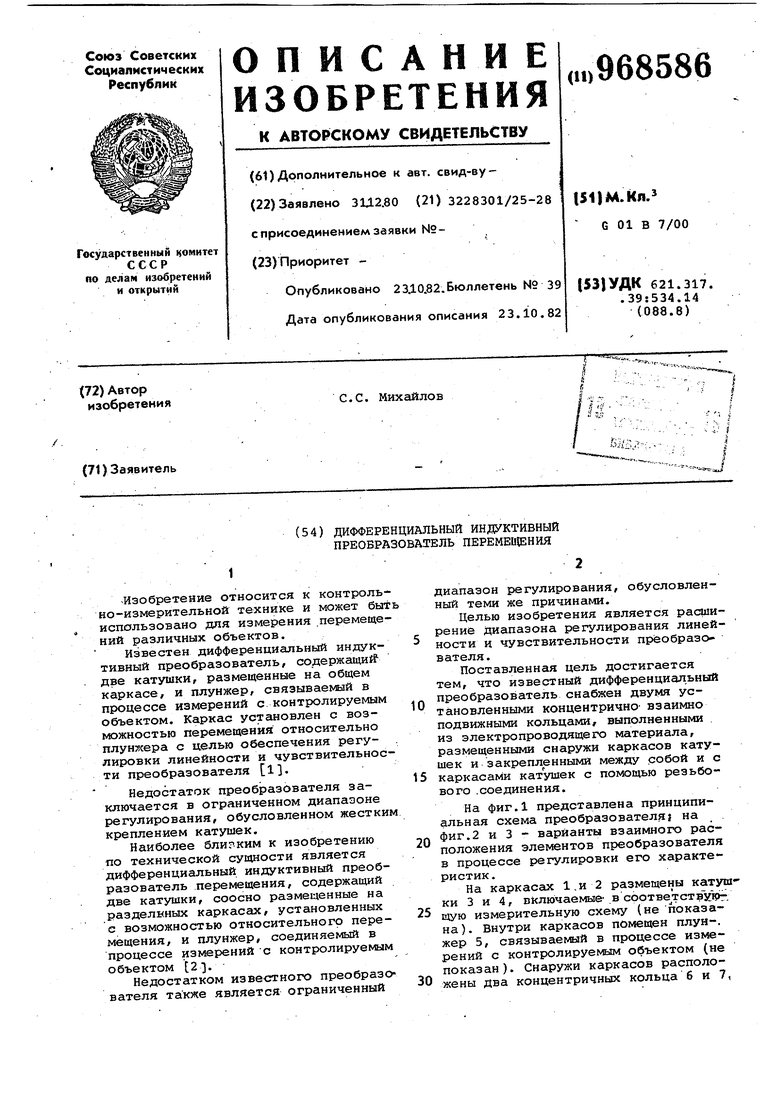
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциальный индуктивный преобразователь перемещений | 1982 |
|
SU1048301A1 |
| Вихретоковый преобразователь | 1989 |
|
SU1739272A1 |
| ВИХРЕТОКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ПРОХОДНОГО ТИПА | 2015 |
|
RU2590940C1 |
| Двухкоординатный преобразователь угловых перемещений | 1989 |
|
SU1665224A1 |
| ВИХРЕТОКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2487314C1 |
| Двухкоординатный преобразователь угловых перемещений | 1991 |
|
SU1837154A1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1784837A1 |
| КАТУШКА ИНДУКТИВНОСТИ ПЕРВИЧНОГО ВИХРЕТОКОВОГО ПРЕОБРАЗОВАТЕЛЯ ПЕРЕМЕЩЕНИЙ ЭЛЕКТРОПРОВОДЯЩЕГО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2020 |
|
RU2749029C1 |
| ВИХРЕТОКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2006 |
|
RU2298178C1 |
| ДИНАМИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЯ И ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2834759C1 |
-Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения .перемещений различных объектов.
Известен дифференциальный индуктивный преобразователь, содержащи две катушки, размещенные на общем каркасе, и плунжер, связываемой в процессе измерений с контролируемым объектом. Каркас установлен с возможностью перемещения относительно плунжера с целью обеспечения регулировки линейности и чувствительности преобразователя 1.
Недостаток преобразователя заключается в ограниченном диапазоне регулирования, обусловленном жестким креплением катушек.
Наиболее близким к изобретению по технической сущности является дифференциальный индуктивный преобразователь перемещения, содержащий две катушки, соосно размещенные на разделнных каркасах, установленных с возможностью относительного перемещения, и плунжер, соединяемый в процессе измерений с контролируемым объектом 2.
Недостатком известного преобразователя также является ограниченный
диапазон регулирования, обусловленный теми же причинами.
Целью изобретения является расширение Диапазона регулирования линейности и чувствительности преобразователя.
Поставленная цель достигается тем, что известный дифференциальный преобразователь снабжен двумя ус10тановленными концентрично- взаимно подвижными кольцами, выполненными из электропроводящего материала, размещенными снаружи каркасов катушек и закрепленными между собой и с
15 каркасами катушек с помощью резьбового .соединения.
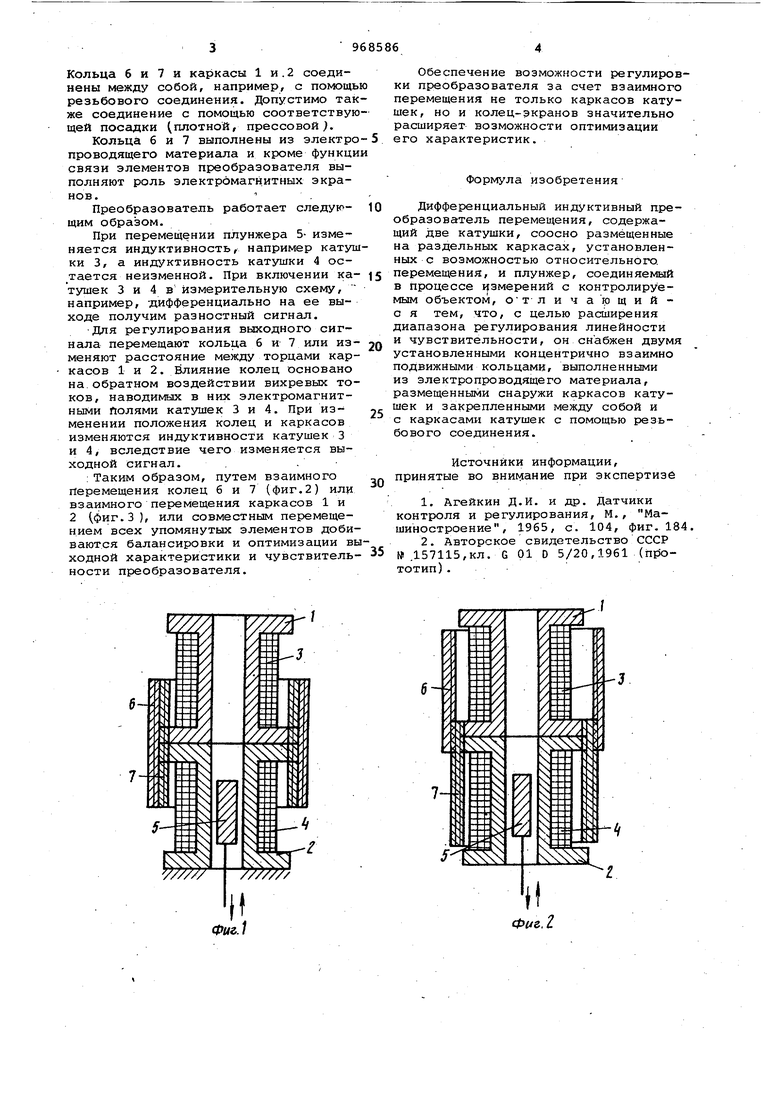
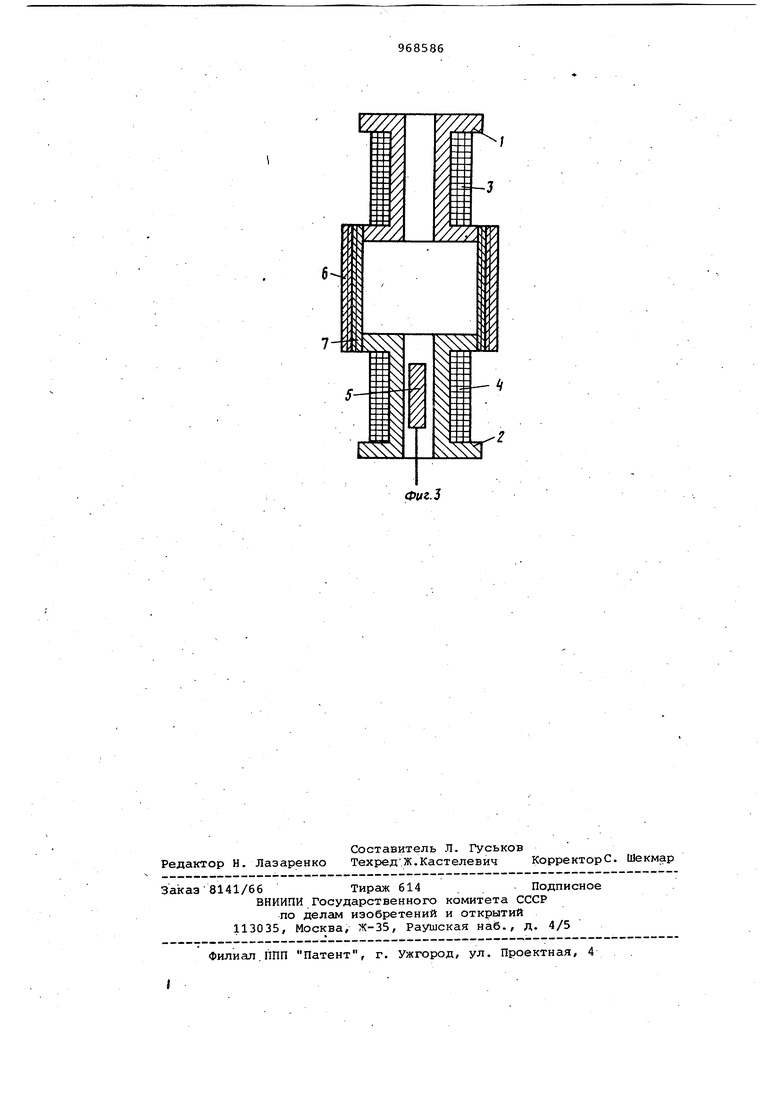
На фиг.1 представлена принципиальная схема преобразователя} на фиг.2 и 3 - варианты взаимного рас20положения элементов преобразователя в процессе регулировки его характеристик.
На каркасах 1,и 2 размещены катушки 3 и 4, вклю1чаемые в соответствий).
25 щую измерительную схему (не показана). Внутри каркасов помещен плун-. жер 5, связываемый в процессе измерений с контролируемым оеЗъектом (не показан). Снаружи каркасов располо30жены два концентричных кольца б и 7, Кольца 6 и 7 и каркасы 1 и.2 соединены между собой, например, с помощь резьбового соединения. Допустимо так же соединение с помощью соответствую щей посадки (плотной, прессовой. Кольца 6 и 7 выполнены из электро проводящего материала и кроме функци связи элементов преобразователя выполняют роль электромагнитных экранов. Преобразователь работает следующим образом. При перемещении плунжера 5- изменяется индуктивность, например катуш ки 3, а индуктивность катушки 4 остается неизменной. При включении ка тушек 3 и 4 в измерительную схему, например, -дифференциально на ее выходе получим разностный сигнал. Для регулирования выходного сигнала перемещают кольца 6 и 7 или изменяют расстояние между торцами каркасов 1 и 2. Влияние колец основано на. обратном воздействии вихревых токов, наводимых в них электромагнитными Полями катушек 3 и 4. При изменении положения колец и каркасов изменяются индуктивности катушек 3 и 4, вследствие чего изменяется выходной сигнал. . . : Таким образом, путем взаимного перемещения колец 6 и 7 (фиг.2) или взаимного перемещения каркасов 1 и 2 (,фиг.З ), или совместным перемещением всех упомянутых элементов добиваются балансировки и оптимизации вы ходной характеристики и чувствительности преобразователя.
Фиг.1
Фи&.1 Обеспечение возможности регулировки преобразователя за счет взаимного перемещения не только каркасов катушек, но и колец-экранов значительно расширяет возможности оптимизации его характеристик. Формула изобретения Дифференциальный индуктивный преобразователь перемещения, содержащий две катушки, соосно размещенные на раздельных каркасах, установленных с возможностью относительного, перемещения, и плунжер, соединяемый в процессе измерений с контролируемым объектом. От л и ч а ю щ и и с я тем, что, с целью расширения диапазона регулирования линейности и чувствительности, он снабжен двумя установленными концентрично взаимно подвижными кольцами, выполненными из электропроводящего материала, размещенными снаружи каркасов катушек и закрепленными между собой и с каркасами катушек с помощью резьбового соединения. Источники информации, принятые во внимание при экспертизе 1.Агейкин Д.и. и др. Датчики контроля и регулирования, М., Машиностроение, 1965, с. 104, фиг. 184, 2.Авторское свидетельство СССР № .157115,кл.а 01 D 5/20,1961 (прототип) .
