Изобретение откосится к электроизмерительной технике и автоматике и может использовано в системах управления перемещением подвижных объектов таких, ;сак машины, тракторы, суда, летательные аппараты.
Цель изобретения - увеличение диапа- ;юна преобразования угловых перемещений за счет коррекции погрешности от нелинейности выходного сигнала преобразователя на краях характеристики преобразования.
I В конструкции преобразователя ис- юльзуется экран, состояа(ий из двух установленных параллельно и механически не связанных пластин разных размеров, которые перемещаются по произвольным направляющим, расположенным в их плоскостях, под действием упругого стержня. За счет выбора положения регулировочной шайбы перемещение пластины меньшего диаметра начинается в конце измеряемого сдиапязона угловых перемещений упругого стержня связи. Выбором размеров первой верхней пластины достигается обеспечение влияния этой пластины только на одну из двух связанных между собой катушек индуктивности, что и обеспечивает коррекцию погрешности нелинейности.
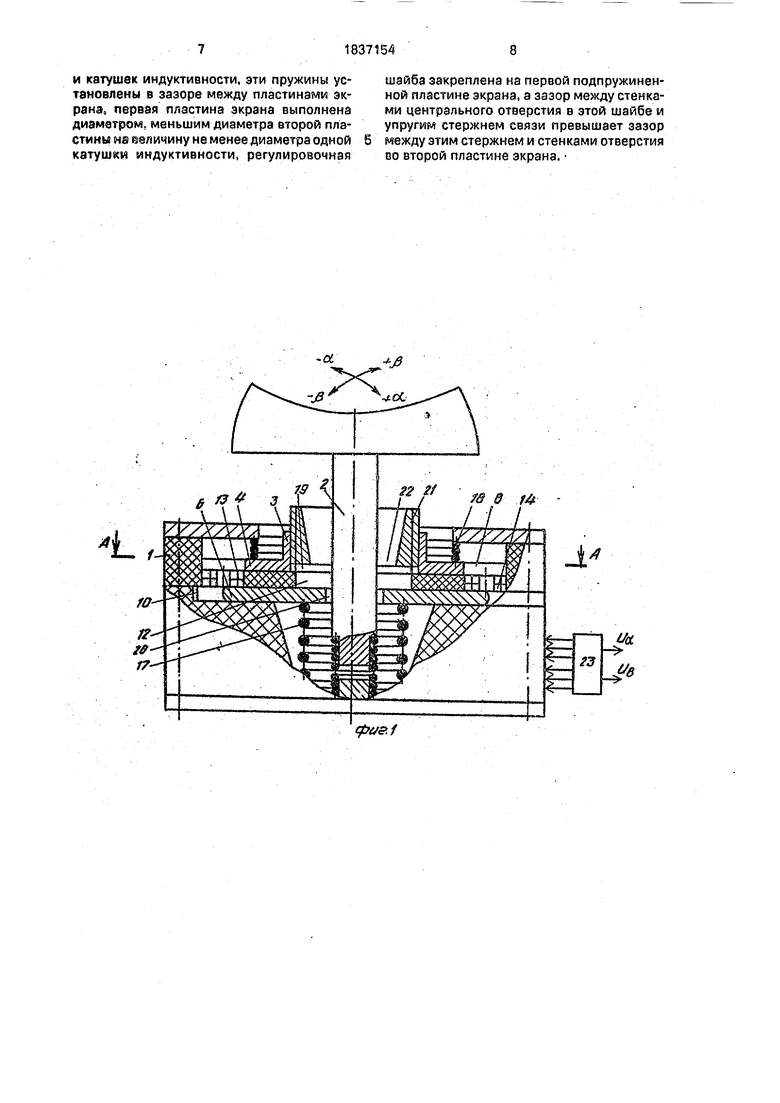
На фиг. 1 показан двухкоординатный преобразователь угловых перемещений; на фиг. 2 - сечение А-А на фиг. 1.
OD
ы
х| СЛ
Двухкоординатный преобразователь уговых перемещений содержит диэлектричекий корпус 1, имеющий центральную часть, рышку и основание, которые могутизготав- иваться из любого материала, Упругий тержень 2 связи с управляющим, объектом акреплен консольно в основании корпуса 1 и выполнен в виде цилиндрической пружины с наконечником. Электропроводящий неферромагнитный экран 3, состоит из верней пластины 4, которая имеет форму плоского кольца со скосами 5, выполненных по внешним образующим в четырех взаимно перпендикулярных плоскостях, и нижней пластины 6 в виде кольца со скосами 7 (фип ), выполненных аналогично скосам 5 пластины 4 и идентично им ориентированных с помощью пластинчатых пружин 8. Пружины 8 установлены в пазах 9 каркаса 1 между корпусом 1 иторцем пластины 4, в неусеченных частях которой сделаны соответствующие установочные пазы для вершин пружин 8, и пластинчатых пружин 10, установленных в пазах 11 каркаса 1 между каркасом 1 и торцем пластины 6, в неусеченных частях которой сделаны соответствующие установочные пазы для вершин пружин 10. Пластины 4 и 6 экрана 3 установлены с зазором 12, в котором расположена центральная часть диэлектрического каркаса 1 с закрепленными в ней двумя катушек 13, 14 и 15, 16 индуктивности. Расстояние между осями дифференциально включенных катушек 13 и 14, а также 15 и 18 индуктивности равны расстоянию между скосами 5 пластины 4, над которой установлены эти катушки индуктивности. Для обеспечения постоянства зазора 12 между пластинами 4 и 6 экрана 3 установлены цилиндрическая пружина 17 между основанием каркаса 1 и пластиной б экрана и цилиндрическая пружина 18 - между крышкой каркаса 1 и пластиной 4, соос- ные стержню 2. Для обеспечения зоны нечувствительности преобразователя к на- чальным угловым перемещениям стержня 2 в пластине 4 выполнено центральное отверстое 19, а в пластине 6 - отверстие 20, диаметры которых больше диаметра стержня 2. Для регулировки зоны нечувствительности верхней пластины 4 в его центральном от- версти и 19 выполнена резьба, на которой установлена подвижная регулировочная шайба 21с центральным отверстием 22, диаметр которого больше диаметра стержня 2. Для обеспечения коррекции нелинейности выходного сигнала преобразователя диаметр кольца пластины 4 выполнен меньше диаметра кольца пластины 6 на величину не меньше, чем диаметр катушек 13, 14, 15, 16 индуктивности, что обеспечивает влияние
пластины 4 при ее перемещении только на одну из двух катушек 13,14 или 15,16индук- тивности, соединенных в пары. Выводы каждой пары катушек 13, 14 и 15, 16 индуктивности соединены с соответствующими входами блока 23 электроники.
Преобразователь работает следующим образом.
В исходном состоянии стержень 2 связи
Ос управляющим -объектом за счет своей жесткости занимает положение перпендикулярное пластинам 4 и 6 экрана 3, а пластины 4 и 6 за счет пружин 8 и 10 соответственно занимают положения, когда оси централь5 ных отверстий 19 и 20 в этих пластинах совпадают.с осью стержня 2. Пружины 17 и 18 обеспечивают постоянство зазора 12 между пластинами 4 и 6, обеспечивая постоянство сигналов с катушек 13-16индук0 тивности. Скосы 5 нижней пластины 6 располагаются под центрами катушек 13-16 индуктивности, что обеспечивает перекрытие пластиной 6 половин поверхности катушек 13-16. Пластина 4 ориентирована
5 скосами 7 идентично пластине 6 и за счет того, что имеет размер между скосами меньше, чему пластины 6, на величину диаметра катушек индуктивности 13-16, в исходном состоянии не перекрывает поверхность ка0 тушек 13-16.
При питании катушек 13-16 от блока 23 электроники переменным напряжением в нижней пластине 6 экрана 3 наводятся вихревые токи, которые создают магнитное по5 ле, параметры которого определяются положением пластины 6 относительно катушек 13-16 индуктивности. Магнитное поле вихревых токов воздействует на катушки 13-16 индуктивности, вызывая уменьшение
0 величины первоначального напряжения на
величину вносимого экраном 3 напряжения.
Поскольку катушки 13-16 индуктивности
. идентичны, то со средних точек пар катушек
13,14 и 15,16 индуктивности будет снимать5 ся нулевой сигнал. Под действием вибрации машины, на которой установлен.преобразователь, возможны угловые перемещения стержня 2 относительно исходного. Диаметр отверстия 19 пластины 4, диаметр от0 верстия 22 шайбы 21, ввернутой в отверстие 19 пластины 4, выбраны таким образом, что случайные перемещения стержня 2 не приводят к перемещениям пластин 4, 6 экрана 3.
5 При управляющем воздействии обьекта управления на стержень 2 происходит перемещение пластины 6 под действием угловых перемещений стержня 2, при этом площадь перекрытия одной из соединенных в пары катушек 13, 14 и (или) 15, 16 индуктивности
удет увеличиваться, а другой - уменьшать- я. Причем изменения площадей будут про- юрциональны. Таким образом, на одной атушке индуктивности, где площадь пере- рытия увеличивается, выходной сигнал бу- ,ет уменьшаться, а на другой - величиваться. Тогда суммарные сигналы, нимаемые со средних точек пар катушек 3, 14, 15,16 индуктивности, будут отличны т нуля. Эти сигналы поступают в блок 23 лектроники, где после усиления детектиро- 1эния преобразуются в постоянные напря- кения Ц/, и Ц, , которые являются ыходными сигналами блока 23 электрони- и.
Поскольку выходные сигналы с каждой атушки 13-16 индуктивности изменяются (елинейно от изменения площади 1ерекрытия их электропроводящим экра- IOM 3, то суммарный сигнал каждой пары атушек 13,14 и 15.16 будет иметь допустимую погрешность нелинейности только при тределенных (небольших) угловых переме- цениях стержня 2, причем на краях диапа- она угловых перемещений стержня 2 югрешность нелинейности резко возрэста- ;т. Для исключения этого эффекта вводится оррекция погрешности нелинейности за ;чет дополнительного влияния на катушки 3, 14, 15, 16 индуктивности верхней пла- ,тины 4 экрана 3 в конце диапазона угловых 1еремещений стержня 2. Для этого переме- цением по резьбе в центральном отверстии 9 пластины 4 регулировочной шайбы 21 убиваются такого положения шайбы 21, :огда взаимодействием стержня 2 с шайбой 1 наступает в момент равенства пргрешно- ти нелинейности ее допустимому уровню. Три этом пропорциональность изменения 1лощадей катушек 13-16 экраном 3 нэру- иится, т.е. в конце диапазона величина при- оста площади перекрытия одной из атушек индуктивности становится больше, ем величина уменьшения площади пере- рытия другой катушки индуктивности в аждой паре катушек 13, 14 и 15, 16. Это триводит к тому, что величины изменения игналов на каждой из катушек индуктивно- ти вновь становятся близкими друг к другу, ,е. осуществляется коррекция линейности уммарного сигнала.
Предлагаемый преобразователь позво- яет расширить диапазон линейности вы- одных сигналов или обеспечить еобходимый уровень погрешности нели- ейности в заданном диапазоне угловых пе- емещений управляющего стержня за счет кспериментального подбора положения егулировочной шайбы. Одновременно реобразователь обладает такими преимуществами, как высокая надежность, за счет бесконтактного формирования сигналов, использования зон нечувствительности к начальным угловым перемещениям упрэв5 ляющего стержня, а, кроме того, высокой точностью преобразования из-за отсутствия взаимного влияния каналов формирования выходных сигналов друг на друга при угловых перемещениях стержня за счет
10 ипользования скосов на пластинах, длины которых выбираются не меньше, чем диапазоны перемещений пластин по координатам под действием управляющего стержня. Эти преимущества позволяют его использо15 вать в качестве элемента управления подвижных объектов.
Ф о р м у л а и з о б р е те н и я Двухкоординатный преобразователь уг0 ловых перемещений, содержащий диэлектрический корпус, закрепленный консольно в его основании упругий стержень связи преобразователя с управляющим объектом, подпружинивающую его цилиндрическую
5 пружину, ось которой совпадает с осью стержня, взаимодействующий со стержнем электропроводный неферромагнитный экран, размещенный соосно со стержнем и состоящий из двух пластин, которые име0 ют форму плоских колец, скошенных по внешним образующим в четырех взаимно перпендикулярных плоскостях, расположенных в параллельных плоскостях с воздушным зазором между ними и
5 установленных перпендикулярно оси упругого стержня связи, чувствительный к пере- мещениям экрана вихретоковый измеритель зазоров, включающий блок электроники и четыре идентичные катушки
0 индуктивности, установленные в диэлектрическом корпусе в общей плоскости, параллельной плоским кольцам экрана, и под углом 90° одна к другой симметрично относительно оси упругого стержня связи, при5 чем размещенные одна напротив другой катушки индуктивности соединены попарно дифференциально и подключены к соответствующему входу блока электроники, установленную между основанием корпуса и
0 одной из кольцевых пластин экрана регулировочную шайбу, а также размещенные .8 пазах корпуса и упирающиеся в торцовые поверхности этой же пластины экрана пластинчатые пружины,отличающийся тем,
5 что, с целью расширения диапазона преобразования за счет коррекции погрешности от нелинейности на краях характеристики преобразования, он снабжен дополнительными цилиндрическими пружинами для
прдпружинивания одной из пластин экрана
и катушек индуктивности, эти пружины установлены в зазоре между пластинами экрана, первая пластина экрана выполнена диаметром, меньшим диаметра второй пластины на величину не менее диаметра одной катушки индуктивности, регулировочная
шайба закреплена на первой подпружиненной пластине экрана, а зазор между стенками центрального отверстия в этой шайбе и упругим стержнем связи превышает зазор между этим стержнем и стенками отверстия во второй пластине экрана. 

| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1784837A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2262072C1 |
| Преобразователь угловых перемещений | 1989 |
|
SU1696850A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2077025C1 |
| Датчик наклона и вибрации | 2019 |
|
RU2707583C1 |
| Преобразователь перемещений | 1991 |
|
SU1779907A1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1803722A1 |
| Двухкоординатный преобразователь угловых перемещений | 2017 |
|
RU2653117C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2003 |
|
RU2245512C1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ОТВЕРСТИЙ БУКС КОЛЕСНЫХ ПАР ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2003 |
|
RU2247315C1 |

cpe/af
Цц
Фиг. 2
