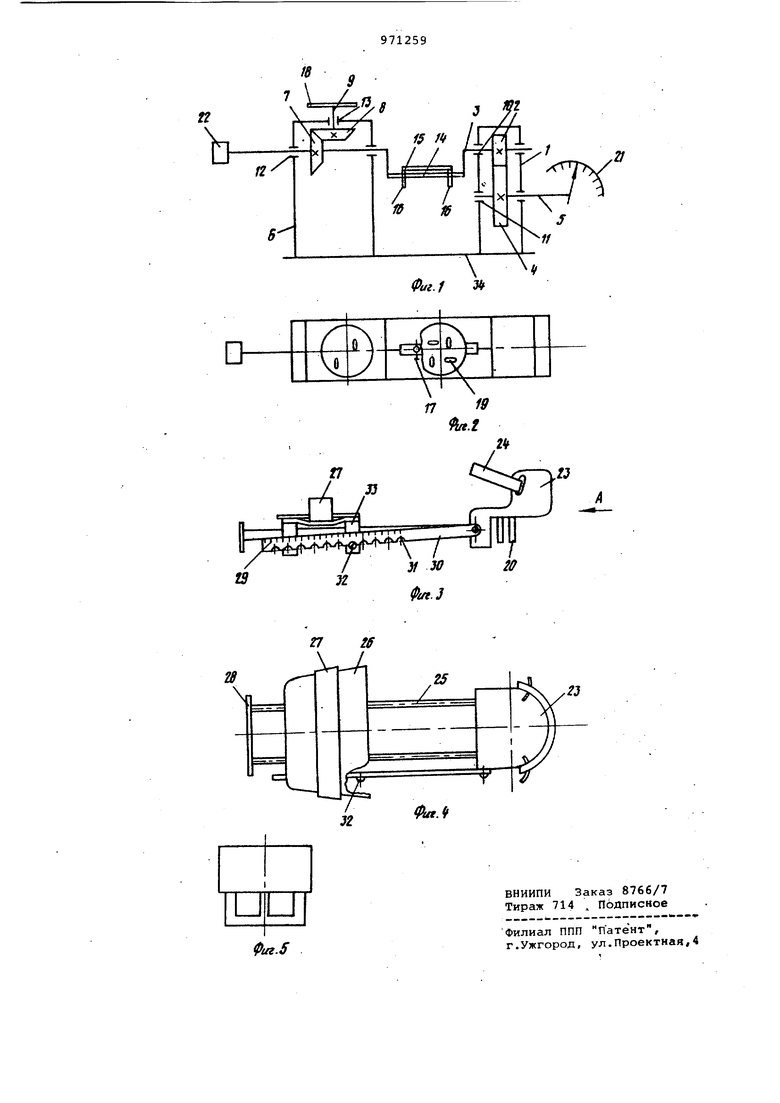
Изобретение относитс57 к медицинской технике., а именно к устройст вам для биомеханических исследований Известно устройство для определения амплитуд движений в .голеностопном суставе, содержащее основание со стойками, в опорах которых расположе вал, снабженный приборами для измере ния амплитуд движений стопы и силы мышц, а также стоподержателем, взаимодействующим с пружиной тарированной жесткости t. Известное устройство не обеспечивает возможности проведения замера двусторонних ротационных движений в тазобедренном суставе, голени, двусторонних наклонных движений отведения-приведения в голеностопном суставе, а также центрирование осей поворота вала стоподержателя и голеностопного сустава, определяющего точность измерений. Кроме того, констру ция стоподержателя не обеспечивает устойчивую фиксацию стоп различных размеров. Целью изобрет:ения является возможность определения подвижности сус тава в трех плоскостях и повышение точности измерений. Поставленная цель достигается тем, что устройство для определения амплитуд движений в голеностопном суставе, содержащее основание, размещен-, ные на нем стойки, вал, расположенный на стойках и соединенный с измерительньлм прибором и стоподержателем, снабжено коническим и цилиндрическим редукторами, расположенными на стойках, при этом вал кинематически связан с редукторами и выполнен коленчатым, стоподержатель снабжен парой мтырей, а соединение вала со стоподержателем выполнено в виде планки с двумя парами отверстий, расположенных на взаимно перпендикулярных осях, и муфты с отверстиями, причем штыри стоподержателя установлены в отверстиях планки и муфты с возможностью. разъема. На фиг. 1 изображена кинематическая схема Устройства для определения амплитуд движений в голеностопном суставе; на фиг. 2 - устройство, вид сверху,- на фиг. 3 - стоподержатель, вид сбоку на фиг. 4 - то же, ввд сверху,- на фиг. 5 - вид А на фиг. 3. Устройство содержит корпус 1 ци(Линдрического одноступенчатого редук тора, в котором размещены ведущая шестерня 2, укрепленная на коленчатом валу J, и ведомая шестерня 4, ук репленная на выходном валу 5. В корпус 6 конического одноступен чатого редуктора помещена ведущая ко ническая шестерня 7,- укрепленная на валу 3, ведомая коническая шестерня 8, укрепленная на валу 9. Валы 3, 5 и 9 помещены в опорах Ю, 11, 12 и 13. На шейке 14 коленчатого вала 3 укреплена крестообразная планка 15 при помощи штырей 16, стопоримых в требуемом положении винтами 17. в планке 15 и муфте 18 конического редуктора выполнены отверстия 19 для установки штырей 20 стоподержателя. Йри этом в планке 15 выполнены две пары отверстий 19, расположенных на взаимно перпендикулярных осях. На выходных концах валов 5 и 3 установлены датчики 21 и 22 измерительных приборов, . Стоподержатель содержит пяткодержатель 23 ремень 24 фиксации стопы две продольные полки 25, по которым передвигается передняя опорная площадка 26 стопы с фиксирующим ремнем 27. Полки 25 оканчиваются упором 28 Передняя подвижная площадка 26 стоподержателя устанавливается по шкале 29 фиксирующей откидной планки 30, взаимодействующей пазами 31 с пальцем 32 1геки 33 площади 26. Корпус 1 цилиндрического редуктора и корпус б конического редуктора Снабженыстойками (не указанными на чертеже размещенными на основании 34 Устройство работает следующим образом. Для проведения измерений амплитуд угловых движений сгибания-расгибания стопы Стоподержатель штырями 20 устанавливается в отверстия 19, попарно крестообразно расположенные в пла ко 15, поперек оси коленчатого вала В зависимости от размеров стопы исследуемого и после установки ее пя кой в пяткодержатель 23 производят по шкале 29 установку требуемого положения опорной передней площадки 26 и фиксируют ее в этом положении отки ной планкой 30, взаимодействующей па .зами 31 с пальцем 32, расположенным на щеке 33 площадки 26. Затем стопу исследуемого фиксируют ремнями 24 и 27 и предлагают больному совершить движения сгибания-разгибания, которые регистрируются датчиком 22 изме рительного прибора. Для повышения то ности измерений ось сустава стопы со мещают с осью вращения вала 3 путем перемещения штырей 16 в отверстиях шейки 14 и стопорения их в требуемом положении винтами 17. Для измерения двусторонних наклонных движений приведения-отведения штыри 20 стоподержателя необходимо установить в отверстия вдоль оси вала 3. При измерении двусторонних ротационных движений, например, в голени Стоподержатель устанавливают в аналогичные отверстия муфты 18 вертикального выходного вала 9 конического редуктора. Благодаря .кинематическому соединению валов устройства, один из которых выполнен коленчатым, при помощи конического и цилиндрического редукторов, его функциональные возможности увеличились ш три раза за счет измерений движений приведения-отведения и ротационных движений в голени и тазобедренном суставе. Выполнение опорной рамки, соединяющей Стоподержатель с коленчатым валом, регулируемой по высоте дает возможность центрировать ось сустава с осью вала, что повышает точность измерений движений в полтора раза. Обеспечение 1 онструкцией стоподержателя подвижности передней опорной площадки повышает надежность фиксации стоп различных размеров, что исключает случайные погрешности в измерениях. Формула изобретения Устройство для определения амплитуд движений в голеностопном суставе, содержащее основание, размещенные на нем стойки, вал, расположенный на стойках и соединенный с измерительным прибором и стоподержателем, от-личающееся тем, что, с целью возможности определения подвижности сустава в трех плоскостях и повышении точности измерений, устройство снабжено коническим и цилиндрическим редукторами, расположенными на стойках, при этом вал кинематически связан с редукторами и выполнен коленчатым, Стоподержатель снабжен парой штырей, а соединение вала со стоподержателем выполнено в виде планки с двумя парами отверстий, расположенных на взаимно перпендикулярных осях, и муфты с отверстиями, причем штыри стоподержателя установлены в отверстиях планки и муфты с возможностью разъема. Источники информации, принятые во внимание при экспертизе 1. Ортопедия, травматология и протезирование. Медицина,1975, № 1, с. 71-72.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разработки подвижности суставов нижней конечности | 1989 |
|
SU1655497A1 |
| Устройство для измерения манипулятивных и силовых характеристик стопы | 1986 |
|
SU1387985A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМОГРАФИИ МЫШЦ СГИБАТЕЛЕЙ И РАЗГИБАТЕЛЕЙ СТОПЫ | 1998 |
|
RU2134063C1 |
| Устройство для разработки суставов нижних конечностей | 1989 |
|
SU1671297A1 |
| СПОСОБ ФИКСАЦИИ ПЕРЕЛОМОВ В ОТСУТСТВИЕ СМЕЩЕНИЙ КОСТНЫХ ФРАГМЕНТОВ | 1998 |
|
RU2193364C2 |
| Прибор для функциональной разработки суставов ног после сращения их переломов | 1945 |
|
SU71904A1 |
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ МЫШЦ ГОЛЕНИ И СТОПЫ | 1991 |
|
RU2014053C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ФУНКЦИИ НИЖНЕЙ КОНЕЧНОСТИ | 1989 |
|
RU2021798C1 |
| Механотерапевтическое устройство для разработки подвижности голеностопных суставов | 2017 |
|
RU2658760C1 |
| СПОСОБ ЗАКРЫТОЙ РЕПОЗИЦИИ ПЕРЕЛОМОВ | 1995 |
|
RU2133114C1 |