Изобретение относится к медицинской технике, а более конкретно к области механотерапии, и может быть использовано для разработки суставов нижних конечностей в период их реабилитации после травм и при устранении последствий оперативного вмешательства.
Установление предшествующего уровня медтехники.
Известно механотерапевтическое устройство для восстановления подвижности голеностопных суставов [1], содержащее:
- основание, на котором жестко закреплен узел фиксации голени в виде пары параллельно установленных дуг с соответствующими направляющими;
- подпружиненный подстопник, установленный на валу и снабженный рукояткой;
- перекладину, выполненную с возможностью перемещения по указанным направляющим и снабженную ремнями для крепления голени;
- элементы крепления стопы и голеностопного сустава и
- градусную шкалу, предназначенную для контроля угла наклона его вала.
Примечание. Сустав - подвижное сочленение двух и более костей скелета.
В данном устройстве возможна процедура механотерапии только в одной плоскости (наклоны подстопника вперед-назад с помощью рукоятки), что снижает лечебные свойства устройства. Кроме того, наличие ручного (неавтоматизированного) привода усложняет труд обслуживающего медработника.
Известно также механотерапевтическое устройство для восстановления подвижности голеностопных суставов [2], содержащее:
- основание;
- площадку для размещения конечности, снабженную элементами крепления и соединенную с основанием упругими элементами;
- средство для взаимодействия с нагружателем, связанное с площадкой и выполненное в виде стойки с П-образным концом, жестко связанным с площадкой в плоскости, проходящей через поперечную ось площадки;
- при этом на стойке размещены две градусные шкалы со стрелками-указателями продольного и поперечного наклона стойки.
В таком устройстве стопа пациента размещается на площадке и фиксируется элементами крепления. Далее возвратно-поступательным перемещением стойки за рукоятку производится разработка голеностопного сустава в продольной и поперечной плоскостях. При этом, в случае необходимости, по градусным шкалам осуществляется регистрация (контроль) углов наклона стопы.
Данное устройство обеспечивает разработку голеностопного сустава в двух взаимно перпендикулярных плоскостях. Однако наличие ручного (неавтоматизированного) привода также усложняет труд медработника.
Известно устройство для восстановления подвижности голеностопного сустава механотерапией [3], содержащее:
- основание;
- подстопники, снабженные элементами крепления;
- ручные приводы в виде съемных рукояток, соединенных с подстопниками;
- шарнирный механизм, соединяющий подстопники с основанием и выполненный в виде двухпараллелограммного многозвенника, имеющего поперечные и продольные оси с закрепленными на них подстопниками, установленными в П-образных кронштейнах, расположенных на поперечной оси с возможностью поворота. В результате каждый подстопник имеет возможность поворота вокруг трех взаимно перпендикулярных осей (одной вертикальной и двух горизонтальных).
Для визуальной оценки углов поворота стопы и ограничения их величины относительно любой из трех осей устройство снабжено шкалами и ограничителями. Перед проведением механотерапии голеностопного сустава голени закрепляют ремнями на фиксаторах голеней, а стопы закрепляют фиксаторами на соответствующих подстопниках. По шкалам выставляют ограничения с помощью ограничителей углов поворота подстопников вокруг каждой из трех осей.
Недостаток данного устройства - сложность конструкции.
Известно устройство для восстановления подвижности голеностопного сустава механотерапией [4], содержащее:
- основание, выполненное в виде двух параллельных стержней;
- опорную стойку, связанную с одним из стержней основания с помощью шарнирного узла с тремя степенями свободы;
- фиксаторы конечности, выполненные в виде подстопников, снабженных съемными рукоятками, и имеющие возможность поворота вокруг трех осей.
Недостаток устройства - сложность его настройки.
Известно также устройство для восстановления подвижности голеностопного сустава механотерапией [5], содержащее:
- основание;
- опору стопы со стойкой и элементами крепления;
- нагрузочный механизм;
- держатель голени, закрепленный на стойке;
- при этом опора стопы выполнена в виде поворотной и наклонной площадок, соединенных шарниром, а нагрузочный механизм - в виде установленных на наклонной площадке направляющих с ползуном, а стойка закреплена на поворотной площадке.
Данное устройство характеризуется сложностью конструкции и низкой автоматизацией труда обслуживающего медработника.
Известно также устройство для восстановления подвижности голеностопного сустава механотерапией [6], содержащее:
- основание, на котором закреплен подпятник под цапфу, а также установлен сегмент со сквозным пазом, причем стержень расположен в пазу с возможностью перестановки и фиксации с помощью фигурной шайбы и гайки;
- привод с реверсивным электродвигателем и коробкой передач;
- кривошипно-шатунный механизм;
- кронштейн с направляющими для воздействия на конечность и каретки;
- зубчатый сектор;
- рейку со штырем и
- шаблон, выполненный с возможностью поворота и оснащенный цапфой и стержнем с резьбой, а также имеющий телескопические тяги с педалью и угломерами.
Данное устройство может работать в трех режимах:
- в режиме сгибания конечности;
- в режиме отведения и приведения конечности;
- при совмещении указанных режимов, т.е. при одновременном выполнении сгибания, разгибания, отведения и приведения конечности.
Основной недостаток данного устройства - сложность конструкции.
Характеристика и критика прототипа.
Наиболее близким изобретением к предлагаемому по наибольшему количеству сходных признаков, технической сущности, схемному решению и достигаемому при использовании результату является механотерапевтическое устройство для разработки подвижности голеностопного сустава [7], содержащее (в варианте разработки голеностопного сустава):
- неподвижное основание с размещенным на нем электронным блоком управления;
- раму, шарнирно соединенную с основанием;
- реверсивный электропривод, размещенный на раме и связанный с электронным блоком управления;
- два конечных выключателя, которые размещены на кронштейнах и также электрически связаны с электронным блоком управления;
- первый (неподвижный) и второй (подвижный) ложементы, снабженные элементами крепления, причем первый ложемент установлен на основании;
- подстопник, также снабженный элементами крепления;
- трансмиссию, выполненную в виде винтовой пары, состоящей из ходового винта, который соединен с выходным валом реверсивного электропривода, и гайки, с которой шарнирно связаны коромысла, жестко соединенные со сменными рычагами кулисного механизма, ползуны которого установлены на втором (подвижном) ложементе;
- при этом сменные рычаги выполнены в виде коленчатого звена, на одном из колен которого закреплен упор, взаимодействующий с концевыми выключателями.
Первый сегмент конечности крепится к основанию при помощи первого (неподвижного) ложемента и предназначен для фиксации образующего сустав сегмента конечности (тела), неподвижного при выполнении разработки.
Второй сегмент конечности закрепляется на втором (подвижном) ложементе, который в процессе разработки сустава совершает (в сагиттальной плоскости) «плоское» движение относительно сменных рычагов с помощью ползунов. При этом движение на сменные рычаги передается от выходного вала электропривода (через карданный механизм) на винтовую пару.
Концевые выключатели предназначены для регулирования (ограничения) диапазона углов наклона подвижного ложемента.
Таким образом, с помощью прототипа возможна разработка голеностопного сустава только в одной плоскости, что сужает его терапевтические возможности. Кроме того, прототип характеризуется низкой автоматизацией процедуры лечения, что усложняет работу лечащего врача.
Технический результат и его достижение.
Изобретение направлено на достижение таких медико-технических результатов как:
- расширение терапевтических возможностей устройства путем разработки голеностопного сустава в двух взаимно перпендикулярных плоскостях;
- повышение автоматизации процедуры лечения голеностопного сустава и облегчение тем самым труда медработника.
Достижение таких результатов обеспечивается тем, что известное механотерапевтическое устройство для разработки подвижности голеностопных суставов, содержащее:
- неподвижное основание с размещенным на нем электронным блоком управления;
- первый реверсивный электропривод, электрически связанный с электронным блоком управления;
- ложемент и подстопник, снабженные элементами крепления,
содержит также:
- второй реверсивный электропривод, электрически связанный с электронным блоком управления;
- первый и второй датчики угла наклона, электрические выходы которых подключены к входам электронного блока управления, снабженного пультом управления;
- многозвенный механизм, в котором:
- первое и второе звенья соединены между собой через первый шарнир;
- третье и четвертое звенья установлены параллельно первым двум звеньям и соединены между собой через второй шарнир;
- первое и третье звенья жестко соединены друг с другом через первую и вторую скобы, а ложемент установлен между ними;
- второе и четвертое звенья соединены между собой через третью скобу, концы которой снабжены фиксаторами положения;
- одни концы параллельно расположенных пятого и шестого звеньев через третий и четвертый шарниры соединены со второй скобой, а их другие концы через пятый и шестой шарниры - с неподвижным основанием;
- первый реверсивный электропривод размещен на первом звене многозвенного механизма, а его выходной вал жестко соединен со вторым звеном многозвенного механизма и ротором первого датчика угла наклона;
- второй реверсивный электропривод размещен на третьей скобе, при этом его выходной вал жестко связан с ротором второго датчика угла наклона и поворотной опорой, на которой размещен подстопник;
- при этом третий, четвертый, пятый и шестой шарниры снабжены фиксаторами положения.
Кроме того,
- первый и второй реверсивные электроприводы выполнены каждый в виде мотор-редуктора;
- на поворотной опоре размещен электровибратор, выполненный в виде подключенного к электронному блоку управления электродвигателя постоянного тока, на вал которого насажен эксцентрик;
- подстопник снабжен средством его подогрева, подключенным к электронному блоку управления и выполненным в виде съемной манжеты, размещаемой на голени пациента и с встроенными в манжету тепловыми элементами;
- первый и второй датчики угла наклона выполнены каждый в виде потенциометрических (переменных) резисторов;
- электронный блок управления имеет разъем для Flash-карты и снабжен звуковым сигнализатором;
- а гнездо для размещения пульта управления закреплено на третьем звене многозвенного механизма.
Заявителем не обнаружены устройства, в которых указанный медико-технический результат достигнут аналогичной совокупностью существенных признаков. При этом проведенный заявителем анализ уровня техники, включающий поиск по патентным и другим научно-техническим и медико-техническим источникам информации и выявление источников, содержащих сведения об аналогах изобретения, позволил установить, что не имеются аналоги, характеризующиеся признаками, идентичными всем существенным признакам изобретения, а выделение из перечня аналогов прототипа [7] обеспечило выявление совокупности существенных по отношению к техническому результату отличительных признаков заявленного изобретения.
Другими словами, по имеющимся у заявителя сведениям аналоги, характеризующиеся совокупностями признаков, тождественными всем признакам заявляемого устройства, отсутствуют.
Указанные признаки являются существенными и взаимосвязаны с образованием устойчивой совокупности существенных признаков, достаточной для получения требуемого медико-технического результата.
Заявителем проведена также проверка соответствия указанной совокупности существенных признаков устройства трем условиям (критериям) патентоспособности.
Соответствие заявляемого устройства условию патентоспособности «новизна».
Для оценки новизны технического решения проанализирована вышеприведенная совокупность существенных признаков заявляемого устройства. Для этого выделены те его признаки, которые совпадают с признаками прототипа, а именно, устройство содержит:
- неподвижное основание с размещенным на нем электронным блоком управления;
- первый реверсивный электропривод, электрически связанный с электронным блоком управления;
- ложемент и подстопник, снабженные элементами крепления.
Если теперь выделить те признаки, которые отличают заявляемое устройство от ближайшего аналога - прототипа [7], то содержит:
- второй реверсивный электропривод, также электрически связанный с электронным блоком управления;
- первый и второй датчики угла наклона, электрические выходы которых подключены к входам электронного блока управления, снабженного пультом управления;
- многозвенный механизм, в котором:
- первое и второе звенья соединены между собой через первый шарнир;
- третье и четвертое звенья установлены параллельно первым двум звеньям и соединены между собой через второй шарнир;
- первое и третье звенья жестко соединены друг с другом через первую и вторую скобы, а ложемент установлен между ними;
- второе и четвертое звенья соединены между собой через третью скобу, концы которой снабжены фиксаторами положения;
- одни концы параллельно расположенных пятого и шестого звеньев через третий и четвертый шарниры соединены со второй скобой, а их другие концы через пятый и шестой шарниры - с неподвижным основанием;
- первый реверсивный электропривод размещен на первом звене многозвенного механизма, а его выходной вал жестко соединен со вторым звеном многозвенного механизма и ротором первого датчика угла наклона;
- второй реверсивный электропривод размещен на третьей скобе, при этом его выходной вал жестко связан с ротором второго датчика угла наклона и поворотной опорой, на которой размещен подстопник;
- при этом третий, четвертый, пятый и шестой шарниры снабжены фиксаторами положения.
Кроме того,
- первый и второй реверсивные электроприводы выполнены каждый в виде мотор-редуктора;
- на поворотной опоре размещен электровибратор, выполненный в виде подключенного к электронному блоку управления электродвигателя постоянного тока, на вал которого насажен эксцентрик;
- подстопник снабжен средством его подогрева, подключенным к электронному блоку управления и выполненным в виде съемной манжеты, размещаемой на голени пациента и с встроенными в манжету тепловыми элементами;
- первый и второй датчики угла наклона выполнены каждый в виде потенциометрических (переменных) резисторов;
- электронный блок управления имеет разъем для Flash-карты и снабжен звуковым сигнализатором;
- а гнездо для размещения пульта управления закреплено на третьем звене многозвенного механизма.
Наличие указанных признаков обеспечивает соответствие всей совокупности существенных признаков условию патентоспособности «новизна». При этом не обнаружены устройства, в которых медико-технический результат достигнут аналогичной совокупностью существенных признаков.
По имеющимся у заявителя сведениям совокупность существенных признаков, характеризующих сущность заявленного изобретения, неизвестна, что позволяет сделать вывод о соответствии ее условию патентоспособности «новизна» по действующему законодательству.
Соответствие заявляемого устройства условию патентоспособности «изобретательский уровень».
Для проверки соответствия требованию изобретательского уровня заявителем проведен дополнительный поиск и анализ решений с целью выявления признаков, совпадающих с отличительными от выбранного прототипа, результаты которого показали, что заявленный объект явным образом не следует из известного уровня техники, определенного заявителем.
Другими словами, сравнение заявляемого устройства не только с прототипом, но и с другими техническими решениями в данной и смежных областях медицинской техники показало, что последние не содержат признаков, сходных с признаками, отличающими заявляемое устройство от прототипа.
Следовательно, заявляемый объект соответствует условию патентоспособности «изобретательский уровень» по действующему законодательству.
При этом также следует отметить, что между совокупностью существенных признаков (отличительными признаками) настоящего изобретения и достигаемым медико-техническим результатом существует причинно-следственная связь, поскольку отличительные признаки не были выявлены ни в одном из аналогов, а достигаемый результат получается лишь при совместном использовании всех без исключения известных и отличительных признаков.
Таким образом, указанные признаки являются существенными и взаимосвязаны с образованием устойчивой совокупности существенных признаков, достаточной для получения требуемого медико-технического результата.
Настоящее изобретение поясняется конкретным примером исполнения, сущность которого иллюстрируется чертежами, где:
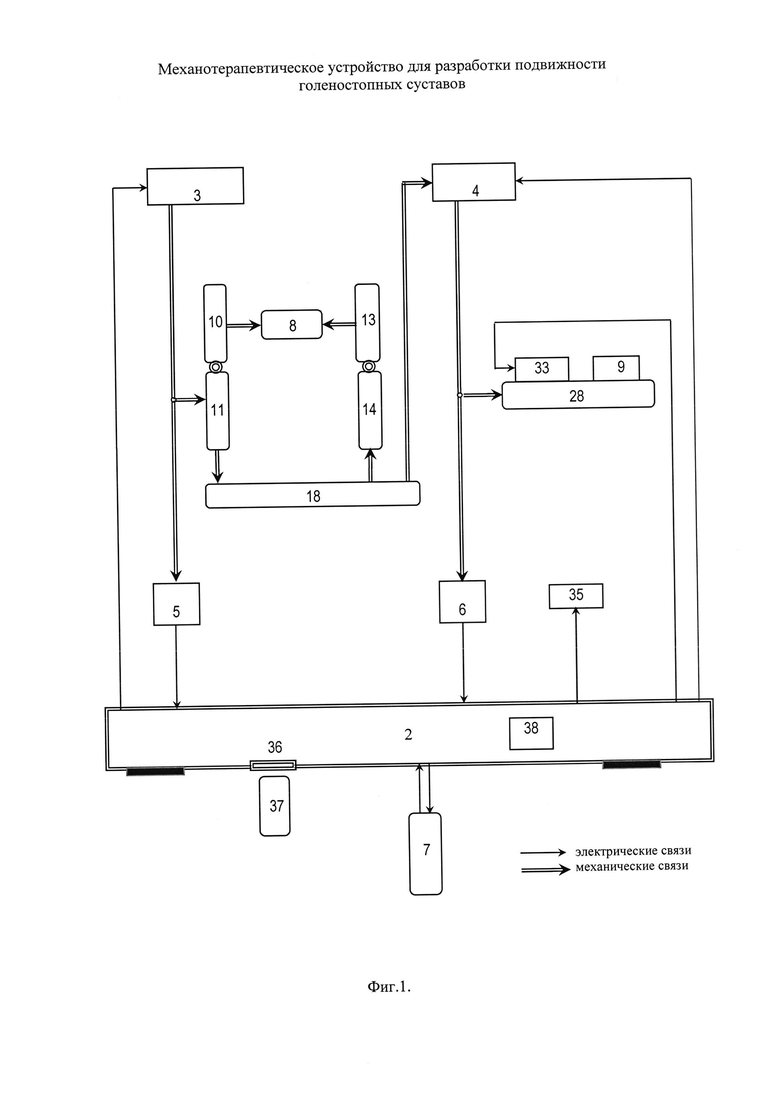
- на фиг. 1 дана блок-схема устройства, в которой показаны его основные механические и электрические связи;
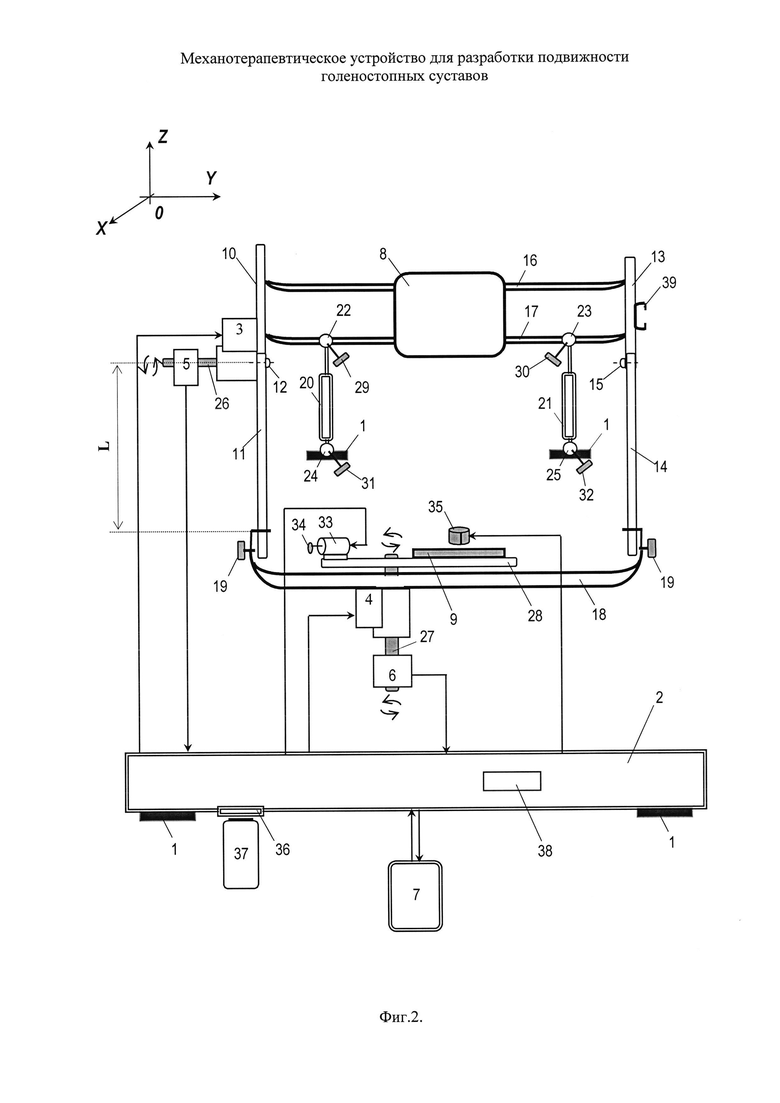
- на фиг. 2 приведена структурная схема устройства;
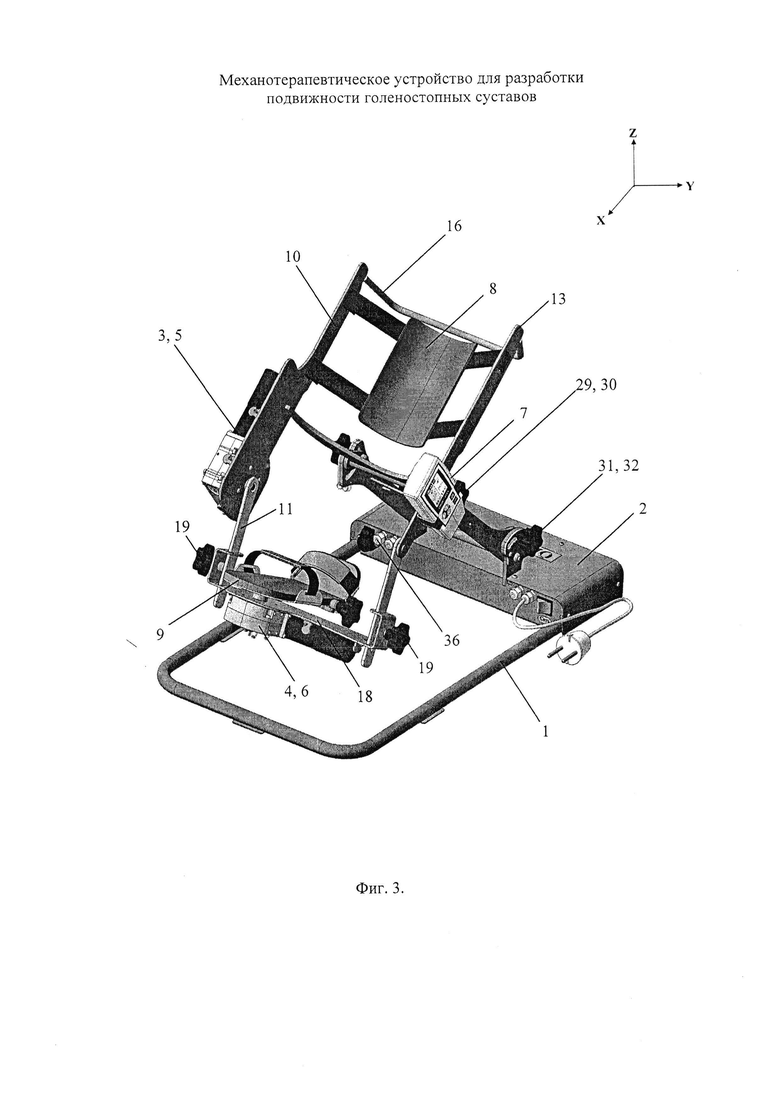
- на фиг. 3 показан его внешний вид;
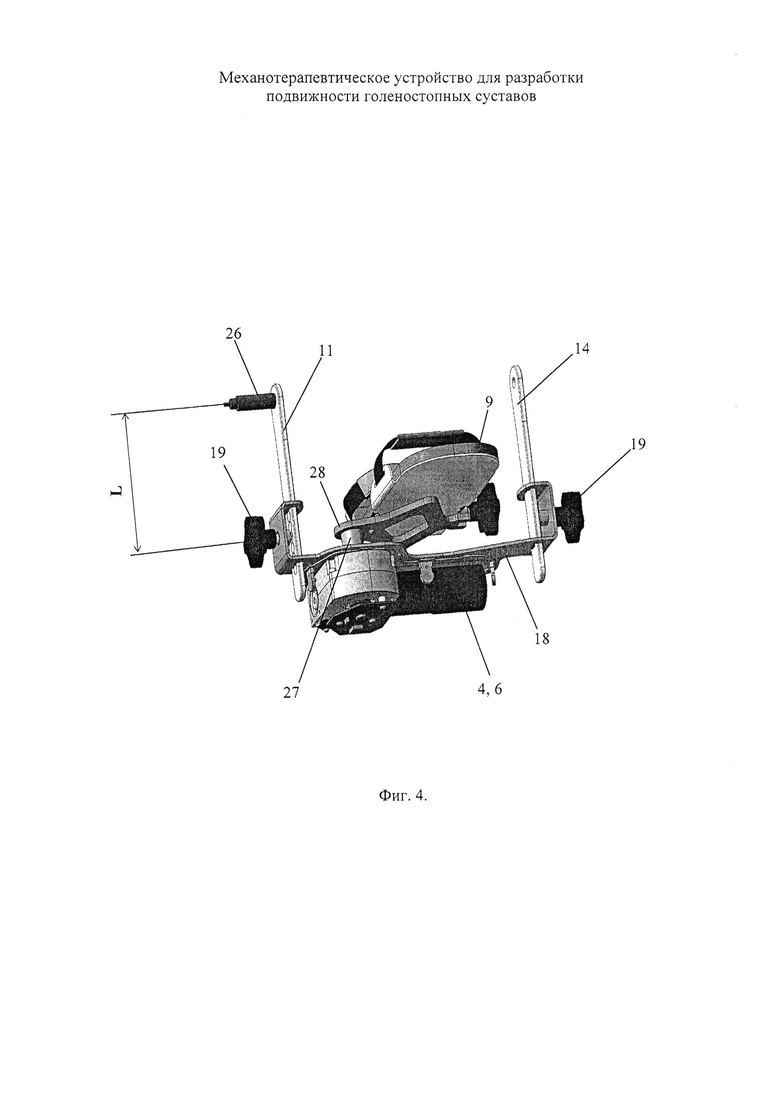
- на фиг. 4 показан подвижный узел устройства, включающий в себя второй мотор-редуктор с выходным валом, поворотной опорой и подстопником;
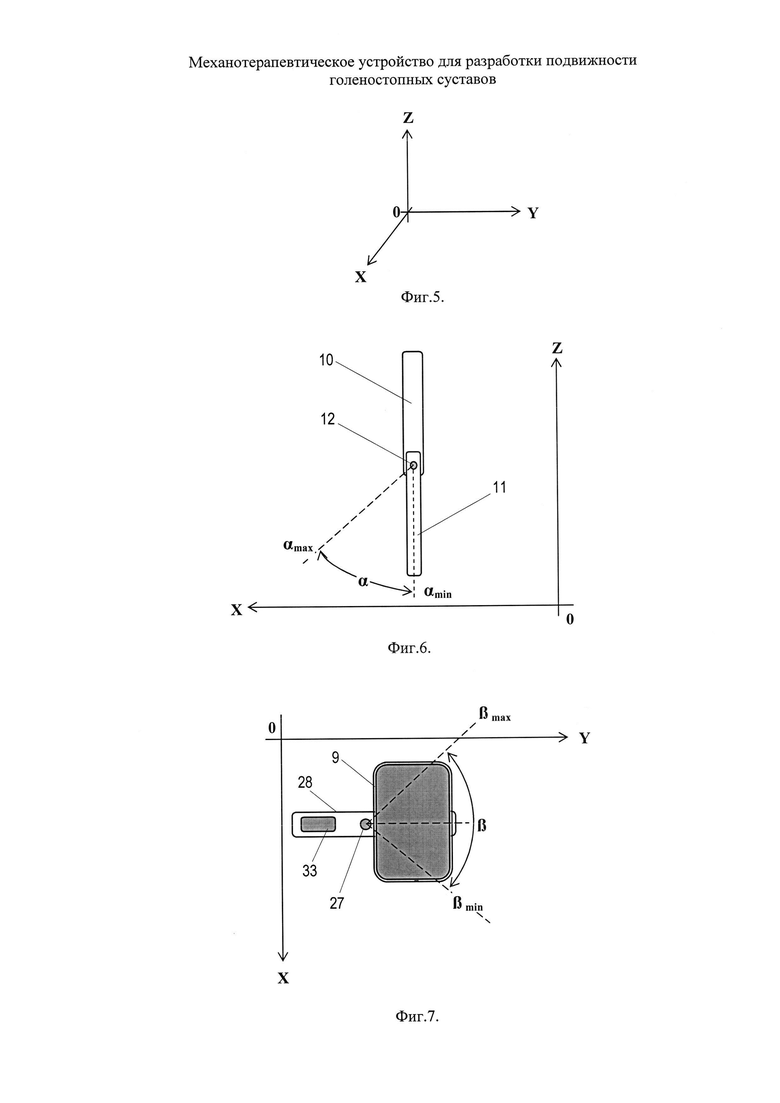
- на фиг. 5 показаны взаимные положения осей координат XYZ;
- на фиг. 6 приведены проекции первого и второго звеньев на вертикальную плоскость X0Z;
- на фиг. 7 даны проекции поворотной опоры вместе с подстопником на горизонтальную плоскость X0Y.
Описание конструкции устройства (в статике).
Механотерапевтическое устройство для разработки подвижности голеностопных суставов содержит:
- неподвижное основание 1 с размещенным на нем электронным блоком 2 управления;
- первый и второй реверсивные электроприводы, выполненные в виде мотор-редукторов 3 и 4 и электрически связанные с электронным блоком 2 управления;
- первый 5 и второй 6 датчики угла наклона, электрические выходы которых подключены к входам электронного блока 2 управления;
- пульт 7 управления, также электрически связанный с электронным блоком 2 управления;
- ложемент 8 и подстопник 9, снабженные элементами крепления (для простоты не показаны);
- многозвенный механизм, в котором:
- первое 10 и второе 11 звенья соединены между собой через первый шарнир 12;
- третье 13 и четвертое 14 звенья установлены параллельно первым двум звеньям 10 и 11 и соединены между собой через второй шарнир 15;
- первое 10 и третье 13 звенья жестко соединены между собой через первую 16 и вторую 17 скобы, а ложемент 8 размещен между ними;
- второе 11 и четвертое 14 звенья соединены между собой через третью (подвижную) скобу 18 (фиг. 3, 4), концы которой снабжены двумя фиксаторами 19 положения;
- одни концы параллельно расположенных пятого 20 и шестого 21 звеньев через третий 22 и четвертый 23 шарниры соединены со второй скобой 17, а их другие концы через пятый 24 и шестой 25 шарниры - с основанием 1;
- мотор-редуктор 3 размещен на первом звене 10 многозвенного механизма, а его выходной вал 26 жестко связан со вторым звеном 11 данного механизма и ротором датчика 5 угла наклона;
- мотор-редуктор 4 размещен на третьей скобе 18, при этом его выходной вал 27 жестко связан с ротором датчика 6 угла наклона и поворотной опорой 28 (фиг. 4), на которой закреплен подстопник 9;
- при этом третий 22, четвертый 23, пятый 24 и шестой 25 шарниры снабжены фиксаторами (барашками) 29-32 положения.
Первый 5 и второй 6 датчики угла выполнены в виде потенциометрических (переменных) резисторов.
На поворотной опоре 28 (фиг. 4) размещен электровибратор, выполненный на основе подключенного к электронному блоку 2 управления электродвигателя 33 постоянного тока (фиг. 2), на вал которого насажен эксцентрик 34.
На голени пациента, рядом с подстопником 9, размещено (при необходимости) средство 35 для подогрева голеностопного сустава. Оно подключено к электронному блоку 2 и выполнено в виде съемной манжеты, в которую встроены тепловые элементы (не показаны).
Электронный блок 2 имеет разъем 36 для Flash-карты 37 (фиг. 1, 2) и снабжен звуковым сигнализатором 38.
Гнездо 39 для размещения пульта 7 закреплено на третьем звене 13 (фиг. 2) многозвенного механизма.
Назначение и функции конструктивных элементов и узлов устройства.
Основание 1 является главным несущим и связующим конструктивным элементом устройства и предназначено для обеспечения его жесткости и устойчивости.
Электронный блок 2 предназначен для приема и выдачи управляющих и информационных сигналов.
Реверсивные мотор-редукторы 3 и 4 обеспечивают формирование крутящих моментов на своих выходных валах 26 и 27.
Датчик 5 угла преобразует взаимно-угловые смещения первого 10 и второго 11 звеньев в соответствующие электрические сигналы. Датчик 6 угла преобразует угловые смещения поворотной опоры 28 в соответствующие электрические сигналы.
Информация о текущем значении угла наклона с датчиков 5 и 6 поступает на соответствующие входа блока 2.
В качестве датчиков 5 и 6 угла наклона могут быть использованы, например, прецизионные потенциометрические (переменные) резисторы, величина сопротивления которых пропорциональна соответствующим углам наклона голеностопного сустава.
Сигналы с датчиков 5 и 6 используются при регулировании диапазона углов наклона подстопника 9 (углов α и β на фиг. 6 и 7). Другими словами, они используются для ограничения углов наклона выходных валов 26 и 27.
Пульт 7 управления предназначен для формирования и хранения программы работы устройства (его кнопки не показаны).
Неподвижный ложемент 8 предназначен для размещения и фиксации бедра пациента во время выполнения лечебных процедур.
Подстопник 9 вместе с элементами крепления предназначен для размещения и фиксации стопы пациента во время выполнения лечебных процедур.
Звенья 10, 11, 13, 14 вместе с шарнирами 12 и 15 предназначены для передачи механических усилий.
Скобы 16-18 обеспечивают жесткость конструкции устройства.
Фиксаторы 29-32 используются перед выполнением лечебных процедур для «подгонки» конструкции устройства к геометрическим параметрам пациента.
Кроме того, фиксаторы 19 применяются для совмещения оси шарнира 12 с условной осью голеностопного сустава, например, путем изменения расстояния L (фиг. 2, 4). Это необходимо для того, чтобы ось вращения шарнира 12 максимально соответствовала биомеханической оси реального сустава, что позволит ускорить время и качество его восстановления. Для снижения болевых ощущений по просьбе пациента расстояние L может меняться.
Фиксаторы 29 и 30 используются для подстройки углов наклона звеньев 10 и 13 устройства по отношению к плоскости его основания 1.
Фиксаторы 31 и 32 предназначены для дополнительной подстройки «высоты» устройства.
Электродвигатель 33 вместе с эксцентриком 34 формируют (при необходимости) вибрационные колебания подстопника 9.
Средство 35 предназначено для подогрева (при необходимости) соответствующего участка голеностопного сустава.
Съемная Flash-карта 37 обеспечивает хранение дополнительной информации, необходимой при разработке сустава.
Звуковой сигнализатор 38 предназначен для звукового информирования пациента и обслуживающего медработника о работе описываемого устройства. В частности, он формирует звуковые сигналы при:
- запуске устройства;
- возникновении аварийной ситуации;
- завершении программы механотерапии,
- а также для формирования других предупредительных сигналов.
Описание работы устройства (в динамике).
а) подготовка устройства к процедурам.
Перед выполнением процедур устройство должно быть установлено на ровной горизонтальной поверхности. При этом следует обратить особое внимание на то, чтобы в его подвижные узлы не могли попасть фрагменты тела пациента и посторонние предметы (одеяла, подушки, кабели и т.п.).
б) подготовка пациента к процедурам.
Желательно, чтобы перед выполнением процедур пациент был одет в облегченный спортивный костюм. Рекомендуется также разработку сустава начинать после предварительной физиопроцедуры (разминки), чтобы снизить у пациента болевые ощущения.
Перед выполнением процедуры бедро пациента размещается на ложементе 8, а стопа ноги - на подстопнике 9. Они фиксируются с помощью соответствующих элементов крепления.
Кроме того, с помощью фиксаторов 29-32 осуществляется подгонка устройства под конкретные «геометрические» параметры пациента.
Подготовка пациента к процедурам завершается ознакомлением его с назначением кнопок пульта 7. Последний должен находиться в доступном для пациента месте, чтобы в случае необходимости он мог оперативно прервать процедуру.
в) выполнение основной лечебной процедуры.
Лечебная процедура основана на выполнении голеностопным суставом сгибательно-разгибательных движений под действием описываемого устройства.
Перед запуском процедуры в зависимости от заболевания и состояния пациента лечащий врач определяет методику и режим лечебно-механического воздействия. В соответствии с этим в пульт 7 управления вводятся соответствующие программы лечения с учетом того, какая процедура будет осуществляться:
- режим, при котором включен только первый мотор-редуктор 3;
- режим, при котором включен только второй мотор-редуктор 4;
- режим, при котором одновременно включены оба мотор-редуктора 3 и 4.
Данные режимы могут осуществляться как при наличии вибрации и обогрева (электровибратор 33 и средство 35 подогрева включены), так и при их отключении.
Далее с помощью пульта 7 вводятся соответствующие параметры лечебной процедуры, в частности:
- последовательность включения мотор-редукторов 3 и 4 (последовательность запуска режимов работы);
- граничные значения αmin и αmax углов наклона подстопника 9 в плоскости X0Z (фиг. 6);
- граничные значения βmin и βmax углов наклона подстопника 9 в плоскости X0Y (фиг. 7);
- частота вибрации подстопника 9 (скорости вращения валов 26 и 27);
- температура подогрева голеностопного сустава;
- время (длительность) процедуры;
- и др.
В устройстве каждое нажатие кнопок пульта 7 «подтверждается» звуковым сигналом сигнализатора 38, что необходимо для того, чтобы медработник и пациент обратили внимание на случайное нажатие кнопок.
г) режим работы устройства, при котором включен только первый мотор-редуктор 3 (второй мотор-редуктор 4 отключен).
При этом (по необходимости) на голени пациента помещается средство 35 и включаются его тепловые элементы. Также может быть включен электровибратор 33.
С нажатием кнопки «Пуск» (не показана) сигнал с пульта 7 поступает в блок 2, который, в свою очередь, запускает мотор-редуктор 3. Вращение его вала 26 начинает вращать ротор датчика 5, что обеспечивает также одновременное угловое движение звена 11 в вертикальной плоскости X0Z и соответствующий наклон третьей скобы 18 (фиг. 6). Вместе с последней совершают угловые смещения мотор-редуктор 4 и поворотная опора 28, а также подстопник 9 вместе с размещенной на нем электровибратором 33 и стопой ноги пациента.
Одновременно информация о текущем значении угла α наклона (фиг. 6) с датчика 5 поступает на соответствующий вход блока 2, в котором происходит ее сравнение с заданными (граничными) значениями αmin и αmax. При совпадении текущего значения с одним из них происходит реверс мотор-редуктора 3 и его ротор начинает вращаться в противоположном направлении, пока текущее значение α не совпадет с очередным граничным значением и ротор вновь не поменяет направление своего перемещения (на противоположное) и т.д.
В результате стопа пациента 9 начинает совершать возвратно-поступательные движения, при которых каждая ее точка перемещается вдоль одной и той же траектории в плоскости X0Z.
По истечении времени процедуры устройство останавливается, что сопровождается соответствующим звуковым сигналом сигнализатора 38.
Следовательно, указанным образом обеспечивается разработка сустава в вертикальной плоскости X0Z.
д) режим работы устройства, при котором включен только второй мотор-редуктор 4 (первый мотор-редуктор 3 отключен).
При этом (по необходимости) на голени пациента помещается средство 35 и включаются его тепловые элементы. Также может быть включен электровибратор 33.
С нажатием кнопки «Пуск» (не показана) сигнал с пульта 7 поступает в блок 2, который, в свою очередь, запускает мотор-редуктор 4. Вращение его вала 27 начинает вращать ротор датчика 6, что обеспечивает также одновременное угловое движение поворотной опоры 28 вместе с электровибратором 33, подстопником 9 и размещенной на нем стопой пациента в плоскости X0Y.
Одновременно информация о текущем значении угла β (фиг. 7) с датчика 6 поступает на соответствующий вход блока 2, в котором происходит ее сравнение с заданными (граничными) значениями βmin и βmax. При совпадении текущего значения с одним из них происходит реверс мотор-редуктора 4 и его ротор 27 начинает вращаться в противоположном направлении, пока текущее значение β не совпадет с очередным граничным значением и ротор не поменяет направление своего перемещения (на противоположное) и т.д.
В результате стопа пациента начинает совершать возвратно-поступательные движения вдоль одной и той же траектории (в плоскости X0Y).
По истечении времени процедуры устройство останавливается, что сопровождается соответствующим звуковым сигналом сигнализатора 38.
Следовательно, указанным образом обеспечивается разработка сустава в плоскости X0Y.
е) режим работы устройства, при котором включены оба мотор-редуктора 3 и 4.
При этом (по необходимости) на голени пациента помещают средство 35 и включаются его тепловые элементы. Также может быть включен электровибратор 33.
С нажатием кнопки «Пуск» (не показан) сигнал с пульта 7 поступает в блок 2, который, в свою очередь, запускает оба мотор-редуктора 3 и 4.
Работа устройства при данном режиме аналогична описанным выше режимам. Отличие заключается лишь в том, что разработка сустава производится одновременно в двух плоскостях X0Z и X0Y. При этом работа обоих мотор-редукторов 3 и 4 приводит к тому, что подстопник 9 вместе со стопой пациента совершают движения по сложной (суммарной, объемной) траектории. При этом форма такой траектории определяется соотношением скоростей вращения валов 26 и 27.
В зависимости от реакции пациента медработник может менять это соотношение.
Включение электровибратора 33 вносит дополнительные изменения в указанную траекторию движения стопы вместе с подстопником 4.
С учетом реагирования пациента на возможные болевые ощущения медработник может включать или не включать средство 35 подогрева. Возможно включение последнего только перед выполнением процедуры.
Таким образом, меняя параметры процедуры можно менять суммарное (лечебное) воздействие на голеностопные суставы пациента и тем самым выбирать наиболее оптимальные параметры лечения.
Послепроцедурные мероприятия.
Послепроцедурные мероприятия проводятся под руководством медработника и могут включать в себя водные и воздушные процедуры, фитотерапию и др., которые завершаются послепроцедурным покоем.
Выводы. Заявляемое устройство является механотерапевтическим средством, предназначенным для непрерывной пассивной разработки голеностопного сустава. Данный метод подразумевает выполнение больным суставом пассивных движений, которые совершаются благодаря описанному здесь устройству, при котором околосуставные мышцы избавлены от активных сокращений.
Основное преимущество описываемого метода, например, перед активной лечебной физкультурой - меньшее количество противопоказаний, так как больной сустав и соответствующая мышечная система испытывают существенно меньшие нагрузки, чем при лечебной физкультуре и каждый лечебный сеанс в устройстве сопровождается менее выраженными болезненными ощущениями.
В устройстве, благодаря тому, что блок 2 управления снабжен разъемом 36, появляется возможность записи результатов процедуры на Flash-карту 37, а также считывания с нее дополнительные лечебные программы по восстановлению подвижности голеностопного сустава.
Таким образом, заявляемое устройство обеспечивает разработку голеностопных суставов в двух взаимно перпендикулярных плоскостях путем одновременного воздействия на область голеностопных суставов также вибрации и теплового поля, что может быть использовано, в конечном счете, для достижения следующих терапевтических целей:
- улучшение обмена веществ в суставе;
- предупреждение тугоподвижности сустава;
- поддержка восстановления и заживления хрящевых зон в поврежденных связках;
- улучшение циркуляции крови и лимфы;
- профилактика тромбозов и эмболии;
- лечение растяжений и ушибов суставов, восстановление их работоспособности;
- профилактика осложнений, связанных с длительной неподвижностью.
Соответствие заявляемого устройства условию патентоспособности «промышленная применимость».
По мнению заявителя сведения, приведенные в описании, достаточны для его осуществления. Такое устройство для восстановления подвижности голеностопных суставов механотерапией не вызывает затруднений при его изготовлении, а возможность промышленного изготовления заявляемого технического решения подтверждается, например, успешным изготовлением авторами нескольких вариантов его реализации.
Вышеизложенные сведения свидетельствуют для заявленного изобретения, как оно охарактеризовано в формуле, о возможности его осуществления с помощью известных средств, что позволяет сделать вывод о соответствии изобретения условию патентоспособности «промышленная применимость» по действующему законодательству.
Таким образом, заявляемое устройство отвечает требуемым условиям патентоспособности и обладает значительными преимуществами по сравнению с известными аналогами.
Источники информации, принятые во внимание при составлении данной заявки
1. Патент РФ №4075 на полезную модель «Устройство для восстановления функции стопы» по кл. А61Н 1/00. Публ. 16.05.1997 г.
2. Патент РФ №94152 на полезную модель «Устройство для реабилитации голеностопного сустава» по кл. А61Н 1/02. Публ. 20.05.2010 г.
3. Авторское свидетельство СССР №725666 на изобретение «Аппарат для механотерапии нижней конечности» по кл. А61Н 1/02. Публ. 05.04.1980 г.
4. Авторское свидетельство СССР №1380748 на изобретение «Устройство для механотерапии конечности» по кл. А61Н 1/02. Публ. 15.03.1988 г.
5. Авторское свидетельство СССР №1595511 на изобретение «Устройство для восстановления функции нижней конечности» по кл. А61Н 1/02. Публ. 30.09.90 г.
6. Авторское свидетельство СССР №848027 на изобретение «Электромеханическое устройство» по кл. А61Н 1/02. Публ. 23.07.1981 г.
7. Авторское свидетельство СССР №1653770 на изобретение «Устройство для разработки подвижности суставов конечностей» по кл. А61Н 1/02. Публ. 07.06.1991 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для восстановления подвижности коленного и тазобедренного суставов механотерапией | 2016 |
|
RU2641065C2 |
| Устройство для разработки подвижности плечевого сустава | 2017 |
|
RU2653811C1 |
| МЕХАНОТЕРАПЕВТИЧЕСКАЯ УСТАНОВКА ДЛЯ МАССАЖА И ГРАВИТАЦИОННОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2012 |
|
RU2512959C1 |
| АППАРАТ ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2005 |
|
RU2307638C2 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2004 |
|
RU2281077C1 |
| Аппарат для биосинхронизированной механотерапии нижних конечностей | 2018 |
|
RU2698853C1 |
| Аппарат для механотерапии нижней конечности | 1977 |
|
SU725666A1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ В СУСТАВАХ | 1998 |
|
RU2139701C1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНОТЕРАПИИ ПОЗВОНОЧНИКА | 2009 |
|
RU2407505C1 |
Изобретение относится к медицине. Механотерапевтическое устройство для разработки подвижности голеностопных суставов содержит неподвижное основание с размещенным на нем электронным блоком управления, первый реверсивный электропривод, электрически связанный с электронным блоком управления, ложемент и подстопник, снабженные элементами крепления, второй реверсивный электропривод, также электрически связанный с электронным блоком управления, первый и второй датчики угла наклона, электрические выходы которых подключены к входам электронного блока управления, снабженного пультом управления, многозвенный механизм, в котором первое и второе звенья соединены между собой через первый шарнир, третье и четвертое звенья установлены параллельно первым двум звеньям и соединены между собой через второй шарнир, первое и третье звенья жестко соединены друг с другом через первую и вторую скобы, а ложемент установлен между ними, второе и четвертое звенья соединены между собой через третью скобу, концы которой снабжены фиксаторами положения, одни концы параллельно расположенных пятого и шестого звеньев через третий и четвертый шарниры соединены со второй скобой, а их другие концы через пятый и шестой шарниры соединены с неподвижным основанием. Первый реверсивный электропривод размещен на первом звене многозвенного механизма, а его выходной вал жестко соединен со вторым звеном многозвенного механизма и ротором первого датчика угла наклона. Второй реверсивный электропривод размещен на третьей скобе, при этом его выходной вал жестко связан с ротором второго датчика угла наклона и поворотной опорой, на которой размещен подстопник. Третий, четвертый, пятый и шестой шарниры снабжены фиксаторами положения. Изобретение обеспечивает расширение терапевтических возможностей устройства путем разработки голеностопного сустава в двух взаимно перпендикулярных плоскостях, повышение автоматизации процедуры лечения голеностопного сустава и облегчение тем самым труда медработника. 6 з.п. ф-лы, 7 ил.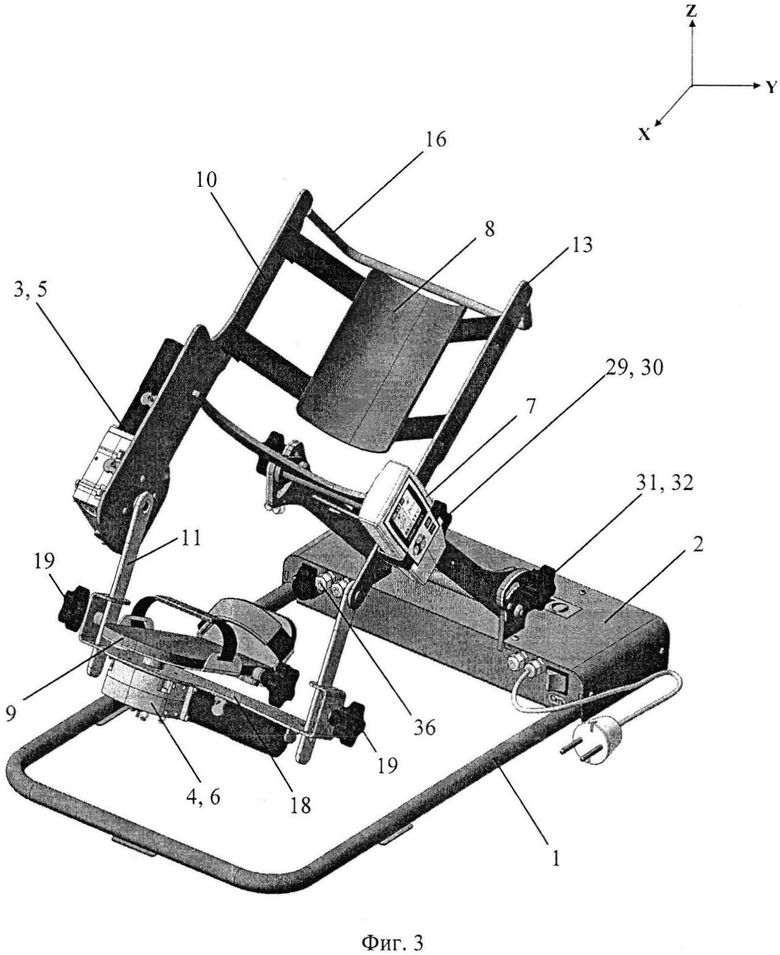
1. Механотерапевтическое устройство для разработки подвижности голеностопных суставов, содержащее:
- неподвижное основание с размещенным на нем электронным блоком управления,
- первый реверсивный электропривод, электрически связанный с электронным блоком управления,
- ложемент и подстопник, снабженные элементами крепления,
отличающееся тем, что содержит:
- второй реверсивный электропривод, также электрически связанный с электронным блоком управления,
- первый и второй датчики угла наклона, электрические выходы которых подключены к входам электронного блока управления, снабженного пультом управления,
- многозвенный механизм, в котором:
- первое и второе звенья соединены между собой через первый шарнир,
- третье и четвертое звенья установлены параллельно первым двум звеньям и соединены между собой через второй шарнир,
- первое и третье звенья жестко соединены друг с другом через первую и вторую скобы, а ложемент установлен между ними,
- второе и четвертое звенья соединены между собой через третью скобу, концы которой снабжены фиксаторами положения,
- одни концы параллельно расположенных пятого и шестого звеньев через третий и четвертый шарниры соединены со второй скобой, а их другие концы через пятый и шестой шарниры - с неподвижным основанием,
- первый реверсивный электропривод размещен на первом звене многозвенного механизма, а его выходной вал жестко соединен со вторым звеном многозвенного механизма и ротором первого датчика угла наклона,
- второй реверсивный электропривод размещен на третьей скобе, при этом его выходной вал жестко связан с ротором второго датчика угла наклона и поворотной опорой, на которой размещен подстопник,
- при этом третий, четвертый, пятый и шестой шарниры снабжены фиксаторами положения.
2. Устройство по п. 1, отличающееся тем, что первый и второй реверсивные электроприводы выполнены каждый в виде мотор-редуктора.
3. Устройство по п. 1, отличающееся тем, что на поворотной опоре размещен электровибратор, выполненный в виде подключенного к электронному блоку управления электродвигателя постоянного тока, на вал которого насажен эксцентрик.
4. Устройство по п. 1, отличающееся тем, что подстопник снабжен средством его подогрева, подключенным к электронному блоку управления и выполненным в виде съемной манжеты, размещаемой на голени пациента, и с встроенными в манжету тепловыми элементами.
5. Устройство по п. 1, отличающееся тем, что первый и второй датчики угла наклона выполнены каждый в виде потенциометрических (переменных) резисторов.
6. Устройство по п. 1, отличающееся тем, что электронный блок управления имеет разъем для Flash-карты и снабжен звуковым сигнализатором.
7. Устройство по п. 1, отличающееся тем, что гнездо для размещения пульта управления закреплено на третьем звене многозвенного механизма.
| US 5211161 A1, 18.05.1993 | |||
| Устройство для разработки подвижности суставов конечностей | 1989 |
|
SU1653770A1 |
| US 5352185 A1, 04.10.1994 | |||
| US 20050148919 A1, 07.07.2005 | |||
| US 5297540 A1, 29.03.1994 | |||
| WO 199718787 A1, 29.05.1997. | |||

