Изобретение относится к измерительной технике и может быть использовано .цля расчета износа и сроков замены каната как при бурении нефтяных и газовых скважин, так и в других областях техники, где применяются канаты.
Известно устройство для измерения работы талевого каната, в котором применен датчик веса инструмента ,или усилия в канате), измеряющий усилие в мертвом конце каната, и датчик пути каната, расположенный у первого подвижного колеса кронблока и дающий число электрических импульсов, равное числу прохождений спиц этого колеса мимо чувствительного элемента датчика, которое в свою очередь определяет путь пройденный канатом 1.
Указанное устройство не обеспечивает измерение работы каната при перемещениях, меньших дискретного отрезка пути, например, за счет колебаний каната, что приводит к значительным ошибкам при определении работы, совершаемой канатом, а следовательно, и его срока службы.
Известно также.устройство для .определения работы талевого каната,
которое включает в себя датчик усилР5я, подкльоченный через блок управления по каналу усилия к счетчику импульсов, датчик пути и, кроме того, оно снабжено датчиком амплитуды и частоты (числа ) колебаний каната , делителем частоты, преобразователам и управляемым генератором, при этом датчик амплитуды и часто10ты колебаний каната подключен через последовательно соединенные преобразователь и управляо.1ый reHepafop к блоку управления по каналу усилия и подключен к блоку управления по каналу пути через делитель чаототы 2.
Данное устройство учитывает полную работу, проделанную талевым канатом как в процессе спуско-подъемных операций, так и в процессе бурения.
20
Однако известное устройство имеет тот. недостаток, что оно требует при:у1енения трех датчиков, что в условиях буровой установки усложняет аппаратуру и ее наладку, снижает
25 надежность системы в целом.
Цель изобретения - упрощение конструкции и повышение надежности устройства.
Указанная цель достигается тем,
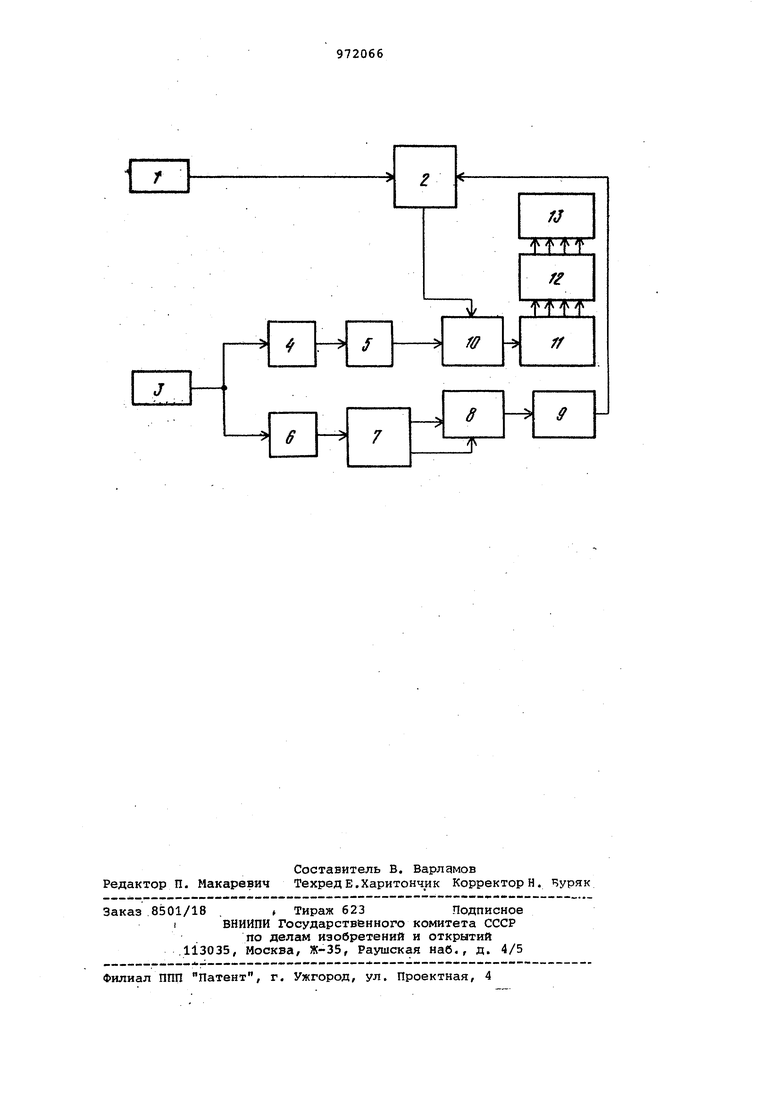
30 что устройство снабжено датчиком перемещений верхней части закрепленного конца каната, фильтром нижних частот (0-0,5 Гц ; и фильтром верхних частот (выше 1 Гц), при этом фильтр нижних частот подключен к блоку логического управления через усилитель и аналого-цифровой преобразователь усилия в- ЧИС/1О импульсов, а фильтр верхних частот подсоединен к блоку логического управления через последовательно соединенные аналого-цифровой преобразователь амплитуды коле баний каната в число импульсов и делитель частоты пути. После обкатки жесткость каната ос ается постоянной и его упругие удли нения прямо пропорциональны нагрузке Это дает основания считать, что уси лие определяется деформацией каната с погрешностью, допустимой для техни ческих измерений. Таким образом, постоянная составляющая перемещений верхней части закрепленного конца ка ната в определенном масштабе соотве ствует статическому усилию в канате тогда как его отклонения от этой постоянной составляющей представляю собой колебательные перемещения каната . Следовательно, один датчик перемещений , которым снабжено устройст-во, при вклЕочении на его выход филь ра нижних частот дает возможность п лучить информацию об усилии в канате, а при включении на его выход фильтра верхних частот - информацию о максимальной аг- пли уде колебатель ных перемещений канатл и частоте ко лебаний .Таким образом, датчик перем щений верхней части закрепленного к |ца каната дает исчерпывающую информ цию как об усилии в канате, так и 06амплитуде и частоте его колебани заменяя тем самым два датчика (усилия и колебанияj,применяемые в известном устройстве. В сочетании с датчиком пути датчик перемещений да ет возможность определить работу та левого каната тем же способом, что И в известном устройстве, каГкпри его значительных перемещениях, так и при их величине, меньшей дискретности пути (при спуско-подъемных операциях и в процессе бурения). На чертеже приведена структурная схема предлагаемого устройства. Устройство включает в себя 1 пути, на выходе которого фслючен блок 2 логического управления по каналу пути, датчик 3 переме щения верхней части закрепленного конца каната, на выходе которого включены фильтр 4 нижних частот с усилителем 5, образующие канал усиЛИЯ, и фильтр ,6 верхних частот с преобразователем 7 амплитуды, образ ющие канал колебаний. Преобразовате 7имеет два выхода: аналоговый в виде постоянного напряжения, пропорционального амплитуде колебания, и и 1пульсный, Б котором частота следования равна частоте колебаний. На выходе 7 -включен аналого-цифровой преобразователь (АЦП) 8 амплитуды колебаний. АЦП имеет ива входа: измерительный, на который подается измеряемая величина ( в данном случае, напряжение), и управляющий, на который подается импульс запуска. Измерительный вход АЦП 8 соединен с аналоговыг/1 выходом преобразователя амплитуды 7, а управляющий вход - с дискретным выходом того же преобразователя. Выход АЦП 8 через делитель 9 частоты соединен с входом блока логического управления по каналу пути . На выход усилителя 5 включен измерительный вход АЦП 10 усилия, управляющий вход которого включен на выход блока 2 логического управления ПО каналу пути. Выход АЦП 10 соединен с входом электронного десятичного счетчика 11, а выход последнего через дешифратор 12 - с индикатором 13 . Устройство работает следующим образом. По мере прохождения спиц ходового колеса крон-блока мимо датчика 1 пути, последний через блок 2 логического управления запускает АЦП 10 усилия. Кроме того-, АЦП 10 может запускаться через блок 2 логического управления и в том случае, когда на выход последнего подается сигнал с делителя 9 частоты. За счет колебательных перемещений верхней части закрепленного конца каната на выходе датчика 3 перемещений появляется переменная составляющая с частотой 1-6 Гц, которая выделяется фильтром 6 верхних частот. 8преобразователе 7 амплитуды этот сигнал усиливается, выпрямляется и сглаживается, после чего подается на аналоговый выход в виде постоянного напряжения, пропорционального амплитуде колебаний. В том преобразователе 7. амплитуды вырабатываются импульсы, число которых равно числу колебаний и которые подаются на его игипульсный выход. Напряжение с аналогового выхода поступает на его импульсный выход. Напряжение с аналогового выхода поступает на измерительный вход АЦП 8, который запускается каждым импульсом, т.е. число иг/пульсов на его выходе пропорционально как амплитуде колебаний, так и их числу, т.е. суммарному колебательному перемещению. Эти импульсы поступают на вход делителя 9частоты, коэффициент деления которого равен отношению дискретного отрезка пути, фиксируемого датчиком 2 пути к цене одного импульса АЦП 8. Таким образом, каждый импульо на выходе делителя 9 частоты соответствует cyм.шpнoмy колебательному перемещению в один дискретный отрезок пути по каналу пути.
Таким образом АЦП 10 усилия запускается любым дискретньтм оТрезком пути незгавис14 1о от вида перемещения. При расстяжении каната приложенным усилием на выходе датчика 3 перемещения появляется постоянный сигнал, который через фильтр 4 и усилитель 5 подается на измерительный вход АЦП 10 усилия и который при каждом запуске последнего преобразуется в число импульсов, пропорционалное усилию. Число же таких запусков определяется числом импульсов с блока 2 управления по каналу пути, т.е. су:/(марным перегу1ещением.
В результате на вход счетчика 11 подается с АЦП 10 усилия общее число и№1ульсов, пропорциональное произведению усилия на число дискретных отрезков пути, т.е. суммарной работе, выполненной талевгзМ канатом как за счет поступательных, так и за счет колебательных перемещений каната. Масштаб дешифратора 12 выбран таким образом, чтобы цифровое значение показания индикатора соответствовало работе в Тм или Ткм.
Предлагаемое устройство имеет перед известным то преимущество, что требует установки на оуровой вдвое меньшего числа датчиков с аналоговым выходом: один датчик перемещения заменяет и датчик силы и датчик колебаний. В то же время по принципу действия этот датчик может быть легко унифицирован с дискретным датчиког/1 пути, оба датчика располагаются
рядом на крон-блоке и могут иметь общий источник питания и канал связи с вторичным прибором, то представляет дополнительное преимущество. Пеньшее число датчиков и их унификация в тяжелых условиях эксплуатации, которые имеют место на буровой установке, повышает надежность аппаратуры в целом.
10
Формула изобретения
Устройство для измерения работы талевого каната, содержащее датчик
15 пути, усилитель, блок логического управления, преобразователи амплитуды и частоты колебаний в число импульсов, делитель частоты и счетчик импульсов с дешифратором и индикатором,
20 отличающее ся тем, что, с целью упрощения конструкции и повышения надежности, оно снабжено датчиком перемещения верхней части закрепленного конца каната, фильтром нижних
25 частот и фильтром верхних частот, при этом фильтр нижних частот подключен к блоку логического управления через усилитель и аналого-цифровой преобразователь усилия в число иг.тульсов.
а фильтр верхних частот подсоединен
30 к блоку логического управления через последовательно соединенн1 1е аналогоцифровой преобразователь амплитуды колебаний каната в число импул.ьсов и делитель частоты.
35
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 208081, кл G, 05 В 11/26, 1966 2. Авторское свидетельство СССР № 868054, кл. Е 21 В 45/00, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения работы талевого каната и устройство для его осуществления | 1979 |
|
SU868054A1 |
| ЦИФРОВОЙ МАГНИТОФОН | 1992 |
|
RU2054715C1 |
| УЛЬТРАЗВУКОВОЕ ДИАГНОСТИЧЕСКОЕ УСТРОЙСТВО | 2002 |
|
RU2221494C2 |
| Устройство для контроля положения стационарных плужковых сбрасывателей | 1990 |
|
SU1813686A1 |
| ЦИФРОВОЙ СОГЛАСОВАННЫЙ ФИЛЬТР СИГНАЛОВ С ДИСКРЕТНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 1992 |
|
RU2114514C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОПРИВОДА РЕГУЛЯТОРА ПОДАЧИ ДОЛОТА | 1996 |
|
RU2108456C1 |
| Устройство для ввода аналоговых сигналов | 1989 |
|
SU1810887A1 |
| БЕСКОНТАКТНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И УЧЕТА РАБОТЫ ТАЛЕВОГО КАНАТА | 1968 |
|
SU208081A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ГЕОЭЛЕКТРОРАЗВЕДКИ | 2001 |
|
RU2207596C2 |
| Устройство для взвешивания движущихся объектов | 1990 |
|
SU1789877A1 |