. 1 . :.
Изобретение относится к измерительной технике и может быть использовано для учета работы талевых канатов как при бурении нефтяных и газовых скважин, так и в других областях техники, где применяются талевые канаты.
Известен расчетный способ подсчета работы, выполненный талевым Манатом, который широко применяется как в нашей стране, так и за рубежом 1. Этим методом работа определяется по формуле:
W (П + n).q. 4.n-ML - 10
W где n - количество свечей;
q - вес 1 м бурильных труб, кГ; L - средняя длина свечи, м; М- вес подвижной части талевой
системы, кГ,
Исходными данными для определения работы талевого каната на практике служат суточные диаграммы инд1Гкат6ра веса рапорта буровых мастеров. Большая громоздкость и трудоемкость данного способа определения работы, выполненной К|1натом, очевидны. Кроме того, как правило, расчеты ведутся по монограммам и таблицам, подготовленным для одноступенчатой буровой -.
колонны, определенной оснастки и подвижной части талевойсистемы. Однако условия глубокого бурения требуют применения составного инструмента, состоящего из труб разного диаметра с разной толщиной стенок и тяжелого низа.Поэтому определение работы талевого каната по указанному способу приводит к значительным ошиб10кам..
Известен способ измерения работы талевого каната, по которому измеряют вес бурового инструмента по величине натя ения неподвижной части талевого каната и одновременно-измеряют перемещение талевого каната, а затем осуществляют непрерывное интегрирование произведения величин и веса бурового инструмента и его перемещения 2 .
20
Осуществляется это с помощью механизма, включающего сельсин-датчик и приемникве«а инструмента, сельсиндатчик и приемник перемещения бурового инструмента, счетно-решающий
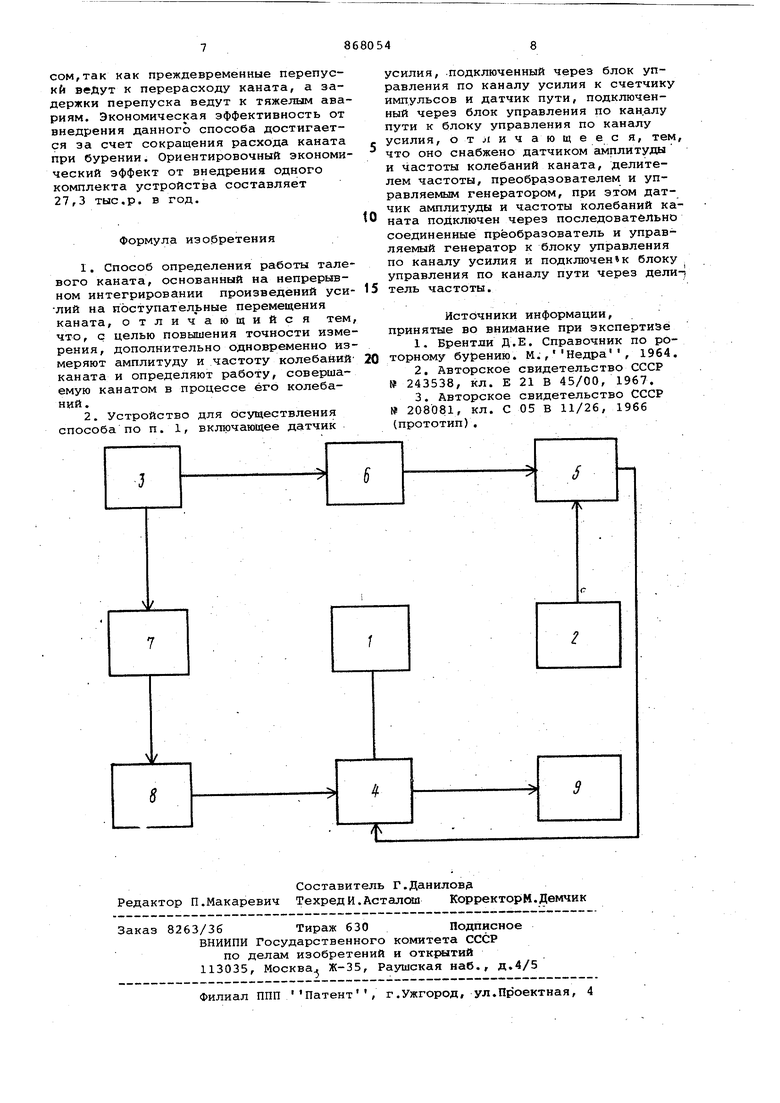
25 блок и отсчетный блок, при этом в количестве счетно-решающего блока использован шаровой интегратор, фракцион которого соединен с се;1ьсин-при30 емником перемещения инструмента через муфту одностороннего вращения, а ходовой винт посредством двигателя через усилитель и через механическую передачу соединен с сельсин-приемником датчика веса бурового инструмента. Необходимость установки специальных датчиков пути и веса и достаточная сложность и металлоемкость такой конструкции затрудняет ее широкое ис пользование в практике. Кроме того, следует подчеркнуть, что данный способ и устройство, его реализующее, не позволяют достаточно точно измерить работу талевого каната и совершенно не учитывают составляющую этой работы за счет колебаний каната. Известен также способ измерения работы талевого каната, реализованный бесконтактным устройством для измерения и учета работы талевого ка ната 3, В данном способе измеряют усилие воздействующее на канат, и путь, пр ходимый подвижной частью талевой сис темы. По результатам измерения вычис ляется совершенная механическая работа : i (2) о где Р - текущее значение веса на крюке; t - путь, проходимый канатом. Однако, с учетом дискретности дей ствия устройства, реализующего данны способ, совершаемая канатом работа определяется как : п) где п - число отре.зков пути пройденное за контролируемый период времени; т - число рабочих струн талевой системы; N - номер ролика кронблока, ог баемого данной ветвью кана та, (за первый принят непо вижный ролик). Устройство, реализующее данный способ, . содержит датчик усиления, датчик пути, блок логического управ ления по каналу пути, блок логического управления по каналу усилия и счетчик импульсов. Через равные интервалы пути датчик пути воздейству ет на бло управления по каналу пути , который, в свою очередь, действует на- блок управления по каналу усилия, в котором производится запо нение очередного сформированного вр менного интервала импульсами постбя ной частоты. Однако, несмотря на определенные преимущества перед известными, данный способ измерения работы талевог каната и устройство, его реализующе обладают низкой точностью, связанно с тем, что учитывается лишь раЗота по перемещению каната на величину н менее заданного интервала дискретного пути и совершенно не учитывается работа, выполняемая канатом при малых перемещениях разного знака, например, при колебаниях каната в процессе буреним. Цель изобретения - повышение точности измерения работы талевого каната. Указанная цель достигается техническим решением, представляющим: собою новый способ измерения работы талевого каната, включающим дополнительное одновременное измерение частоты и амплитуды колебаний каната и определение работы, совершаемой канатом в процессе его колебания. Данный способ отличается от известного тем, что непрерывно интегрируют произведения одновременно кбнтролируемых усилий и поступательных перемещений каната, синхронно измеряют амплитуду и частоту колебаний каната, определяют работу совершаемую канатом в процессе его колебаний, а затем суммируют последнюю с работой поступательного перемещения каната. Устойство, реализующее данный способ, включающее датчик усилия, подключенный через блок управления по каналу усилия к счетчику импульсов и датчик пути, подключенный через блок управления по каналу пути к блоку управления по каналу усилия, дополнительно снабжено датчиком амплитуды и частоты колебаний каната, делителем частоты, преобразователем -амплитуды колебаний каната в напряжение постоянного тока и управляемым генератороМ(, при этом датчик амблитуды и частоты колебаний каната подключеи через последовательно соединенные преобра:зователь и управляемый генератор к блоку управления по каналу усилия и подключен к блоку управления по каналу пути через делитель частоты. Исследованиями и аналитическими расчетами установлено, что в процессе эксплуатации талевые канаты совершают работу не только связанную с перемещением каната, но и работу, совершаемую при колебаниях каната. Для данной работы составляет не менее 20% от работы поступательного перемещения каната. . На чертеже дана блок-схема устройства для осуществления предлагаемого способа. Устройство состоит из датчика 1 УСИЛИЯ, датчика 2 пути и датчика 3 амплитуды: и частоты колебаний каната. Выход датчика усилия подключен к блоку 4 логического управления по каналу усилия,,а выход датчика пути - к блоку 5 логического управления по каналу пути. Один выход датчика колебаний каната соединен через делитель 6 частоты с дополнительным входом блока логического управления по каналу пути, а второй выход этого же датчика через преобразователь 7 амплитуды колебаний каната в напряжение посто янного тока и управляемый генератор 8 связан с блоком логического управ ления по .каналу усилия, к которому подключен счетчик 9 импульсов. Устройство работает следующим образом. Усилие, воздействующее на канат, непрерывно контролируется датчиком 1 усилия, а поступательное перемещение каната датчиком 2 пути. Выходной сигнал датчика 1 подается на блок 4, где преобразуется во вр 4енной интер вал М- , строго пропорциональный величине усилия действую1цего на канат Д,гР; где - постоянный коэффициент с раз мерностью времени. . При поступательном перемещении ка ната на. выходе датчика 2 пути появля ются иш1ульсы, число КОТ01Л1Х hn равно количеству дискретных отрезков пути ле. Данные импульсы через логический блок 5 воздейегйуют на логический блок 4, после чего тот выдает серию счетных импульсов с управляемого генератора 8 с частотой f за время 41 . Данные импульсы поступают на счетчик 9 импульсов. Отсчет счетчика 9 за один импульс датчика пути -«о л огГ-Р:; Полный отсчет счетчика за время поступательного перемещения каната чр -ЙЖ-РЛ При бесконечном увеличении числа дискретных отсчетов предел этого отсчета стремится к интегралу произведения одновременно контролируемых усилий и поступательных перемещений каната. Действительно, при подстанов ке в (6) значений п из (5) и введейии Д Е под знак суммы получим п . {1 .-rV lpi inf,- oo1«1 TO 1- 4 Получаемые отсчеты характеризуют работу поступательного перемещения каната. В процессе бурения талевый канат имеет значительные колебания; Синхронно с помощью датчика 3 из1Мвряют амплитуду и частоту колебаний каната, по которым вычисляют дополнительную величину работы, сове1Ж1аемук талевыМ канатом в процессе его коЛебаний, и величина данной работы суммируется с работой поступательного перемещения каната. Уровень амплитуды колебаний каната достигает зиачительных величин, а когда амплитуда колебаний tAt превьвиает пороговое 9начение еУ-една выходе датчика амплитуды и частоты колебаний каната появлябтся дискретный сигнал с частотой f. , , соответствующей частоте колебаний каната, а на выходе преобразователя 7 напряжение, пропорциональное амплитуде колебаний каната, которое поступает на вход управляемогоГенератора 8. В результате частота генератора 8 будет пропорциональна амплитуде колебанийа число импульсов, поступающих в логический блок 4, составит .-. -- Тогда, полный отсчет счетчика за период действия амплитуды колебаний каната S „ « I S VSj-« o, Корректировку масштаба работы -колебаний и поступательного перемещения осуществл5 зт -делением частоты колебаний, для чего коэффициент деления частоты делителя 6 выбирают равным отношению длины дискретного отрезка пути лЕ к noporoBqii(iy значению амплитуды колебаний каната : бесконечном увеличении числа дискретных отсчетов предел .этого отсчета стремится к величине работы колебательных перемещений каната без учета их знака и изменений усилия за период. Действительно eiw П4р.еЛ-е,..|...,. n j-too о где W - реактивная энергия колебаний с учетом постоянства Таким образом, при отсутствии поступательных перемещений каната отсчет N определяет работу за счет колебаний каната, а при малой.амплитуде колебаний и больших перемещениях отсчет NJ, определяет работу поступательного-перемещения каната. Первый отсчет имеет место при отсутствии быстрых перемещений, например, в процессе бурения твердых пород, второй при быстрых перемещениях, например, при спуско-подъемных операциях. Суммарный отсчет работы талевого каната, интегрируемый счетчиком. 9, характеризует работу каната как поступательного перемещения каната, так.и работу каната совершаемую в процессе его колебаний, что позволяет строго контролировать моторесурс .талевых канатов. Применен91е данного способа позволяет определить фактическую работу талевого пласта, что в свою очередь позволяет рационально эксплуатировать канаты, выдавать рекомендации по оптимальному перепуску каната в соответствии с отработаннымfpecyp
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения работы талевого каната | 1980 |
|
SU972066A1 |
| Устройство для измерения глубины скважины в процессе бурения | 1979 |
|
SU859616A1 |
| БЕСКОНТАКТНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И УЧЕТА РАБОТЫ ТАЛЕВОГО КАНАТА | 1968 |
|
SU208081A1 |
| Устройство для измерения глубины скважины | 1988 |
|
SU1520237A1 |
| Устройство для измерения глубины скважины | 1983 |
|
SU1099057A1 |
| Устройство для измерения глубины скважин в процессе бурения | 1988 |
|
SU1615350A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧИСЛА ОБОРОТОВ И МОМЕНТА ЭЛЕКТРОПРИВОДА | 1996 |
|
RU2096905C1 |
| Устройство для определения износа долота в процессе бурения | 1979 |
|
SU872736A1 |
| СПОСОБ ИЗМЕРЕНИЯ ДЛИНЫ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ КОЛОННЫ ТРУБ ПРИ СПУСКОПОДЬЕМНЫХ ОПЕРАЦИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324812C1 |
| Устройство для измерения глубины скважины | 1980 |
|
SU875001A1 |
