Изобретение относится к весоизмерительной технике и может быть использовано для взвешивания движущихся объектов.
Известно устройство, содержащее N платформ, N первых и N вторых датчиков, 2N усилителей, N первых сумматоров, N компараторов, N первых и N вторых ключевых схем, второй и третий сумматоры, две усредняющие цепи и схему управления, в котором первые датчики через усилители соединены с первыми входами первых сумматоров и компараторов, а вторые - через усилители со вторыми входами первых сумматоров и компараторов, выходы сумматоров соединены со входами первых и вторых ключевых схем соответственно, выходы первых ключевых схем связаны с соответствующими входами второго сумматора, а вто- рых - с соответствующими входами третьего сумматора, выходы компараторов соединены со входами схемы управления, первые входы которой связаны с управляющими входами ключевых схем, вторые - с
управляющими входам.и усредняющих цепей, входы которых соединены с соответствующими выходами второго и третьего сумматоров. Устройство обладает низкой производительностью, потому что накладывает жесткие ограничения на скорость движения движущихся объектов, так как алгоритм функционирования не позволяет отфильтровать помеху, число периодов которой в интервале измерения менее двух.
Известно устройство, содержащее .весовую платформу, три путевых датчика, два датчика веса, микропроцессорное вычислительное устройство, РЭУ, устройство опознавания объекта, световое табло, пульт управления, индикатор и печатающее устройство, причем к соответствующим входам микропроцессорного устройства подсоединены выходы первого, второго и третьего путевых датчиков, выходы первого и второго датчиков веса, выход устройства опознавания объекта и первый выход пульта, а выходы микропроцессорного устройства
VI
00
ю
00
VI VJ
связаны со входами устройства опознавания объекта и пульта, второй выход пульта соединен с печатающим устройством. Устройство обладает низкой производительностью, потому что накладывает жесткие ограничения на скорость движения движущихся объектов, так как алгоритм функционирования не позволяет отфильтровывать помеху, число периодов которой в интервале измерения менее двух.
Из известных устройств наиболее близким является устройство для взвешивания движущихся объектов, содержащее весовую платформу, два путевых датчика, датчик веса, микропроцессорное вычислительное устройство (МП), ОЗУ, устройство управления счетчиком, счетчик, индикатор, два устройства сравнения и два регистра, причем, вход МП устройства соединен с выходом устройства управления счетчиком, второй вход которого к путевым датчикам, а выход - к счетчику, второй вход которого соединен с синхронизирующим выходом МП устройства, а выход подключен к выходу МП устройства и выходам устройств сравне- ния, выход МП устройства соединен с входом ОЗУ, индикатором и двумя регистрами, выходы которых подключены к вторым входам устройств сравнения соответственно, выходы которых подключены к входам уст- ройства управления счетчиком, выход второго регистра соединен также с третьим входом счетчика. Устройство обладает низкой точностью, так как динамическая составляющая помеха практически всегда присутствует в сигнале в виде нескольких переменных составляющих с различными параметрами (частота, амплитуда, фаза) из- за колебаний объекта по нескольким степеням свободы. Это приводит к большим погрешностям при синтезе дополнительного сигнала по измеренным экстремумам. Кроме того, обязательность наличия максимума и минимума помехи в-измерительном сигнале требует, чтобы его длительность была не менее одного периода колебаний помехи, что снижает быстродействие прототипа.
Цель изобретения - повышение точности взвешивания движущихся объектов путем улучшения фильтрации низкочастотной динамической помехи.
Поставленная цель достигается тем, что в устройство для взвешивания движущихся объектов, содержащее первый и второй путевые датчики, датчик веса, синхронизатор, первый счетчик, первый и второй регистры, вход которого соединен с индикатором, первым оперативным запоминающим устройством, первым, информационным входом микропроцессорного вычислительного
устройства, второй информационный вход которого соединен с первым постоянным запоминающим устройством, введены третий путевой датчик, первый и второй ключи, второй счетчик, первый и второй делители, аналоговый фильтр, аналого-цифровой преобразователь, М первых и М вторых блоков задержки, третий блок задержки, М вторых оперативных запоминающих устройств, М сумматоров, первый и второй накопители, второе постоянное запоминающее устройство, умножители, причем выход первого пу- тевого датчика соединен с входом разрешения первого ключа и установочным входом первого счетчика, выход которого связан с входом первого регистра, а счетный вход - с выходом первого ключа, вход управления которого соединен с выходом синхронизатора и первым входом первого делителя, второй вход которого связан с выходом первого регистра и цифровым входом аналогового фильтра, а выход - со входом второго ключа, выход которого соединен со счетным входом второго счетчика, входом третьего блока задержки и синхронизирующим входом аналого-цифрового преобразователя, вход которого связан с выходом аналогового фильтра, а цифровой выход - с первыми входами М сумматоров, через последовательно соединенные М первые и М вторые блоки задержки с входом первого накопителя, входом первого оперативного запоминающего устройства, вторые входы М сумматоров соединены с выходами М вторых блоков задержки, выход датчика веса связан со входом аналогового фильтра, выход третьего путевого датчика соединен с входом третьего блока задержки, выход которого соединен с входом запрета второго ключа, входом прерывания микропроцессорного вычислительного устройства, входом установки режима Чтение вторых оперативных запоминающих устройств, установочным входом второго накопителя, выход которого связан с первым входом вычитателя, а вход - с выходом умножителя, вход которого соединен со входом второго регистра, входом второго постоянного запоминающего устройства, выходами М вторых оперативных запоминающих устройств, управляющим входом второго делителя, выходом первого оперативного запоминающего устройства и с первым информационным входом микропроцессорного вычислительного устройства, выходы М сумматоров соответственно соединены с входами М вторых оперативных запоминающих устройств, адресные входы которых связаны с входом второго счетчика, выход вычитателя соединен со входом второго делителя, а второй вход - с выходом первого накопителя, установочный вход которого связан с установочным входом второго счетчика, входом установки режима Запись вторых оперативных запоминающих устройств, входом записи первого регистра, входом запрета первого ключа, входом разрешения второго ключа и выходом второго путевого датчика. Введенные блоки и связи в совокупности с известными повышают быстродействие ус- тройства за счет того, что позволяют определить все параметры существующих колебания в тренде измеренного сигнала, восстановить эти колебаний, автоматически компенсировать их и по уже очищенному сигналу путем усреднения получить вес объекта. Сущность изобретения заключается в том, что объект перемещается по измерительному участку, перед которым расположены два путевых датчика на заданном расстоянии друг от друга. По временному интервалу между сигналами этих двух датчиков определяют скорость движения объекта V, а по ней время нахождения объекта на измерительном участке, полосу среза аналогового фильтра, интервал дискретизации между отсчетами, снимаемыми с датчика веса, установленного на измерительном участке. Сигнал с датчика веса фильтруют аналоговым фильтром НЧсцельюограниче- ния полосы частот шумов и помех, оцифро- вывают с частотой дискретизации, превышающей частоту Найквиста для аналогового фильтра НЧ. Для улучшения фильтрации помех, число периодов которых на измерительном интервале менее двух, данные аппроксимируют выражением м
R(t) - + 2 Aj cos(Wj-t) +
+ 2 Bj-sin(Wj t)},(1)
где Р - истинный вес объекта;
Wj - частоты гармонических колебаний движущегося объекта;
Aj, BJ - коэффициенты, определяющиеся амплитудой и фазой колебаний с частотой Wj;
F - известная передаточная функция из- мерительного участка и датчиков веса, определяемая их конструкцией и физическими принципами реализации. Выделение постоянной составляющей сводится к определению параметров динамических составляющих: Aj, BJ, Wj.
Методика определения частот Wj, реализуемая предлагаемым устройством, приведена в литературе А.Г.Ивахненко,
Ю.П.Юрачковский. Моделирование сложных систем по экспериментальным данным. М., Р. и св., 1987 г., стр.81, по которой вначале определяются коэффициенты пропорциональности QJ, исходя из минимума значения следующего функционала
N-ММ
I Ц + ХН -Хк}2 (2) k m +1 j 1
Авторами для этого используется .процедура сингулярного разложения Дж.Фор- сайт, М.Малькольм, К.Моулер. Машинные методы математических вычислений. М. Мир, 1980.
Число параметров QJ определяется числом гармонических составляющих колебаний М, включенных для рассмотрения в модель (1). Полученные оценки используют для определения значения частот Wj в соответствии с описанной методикой: м
2 Qj cos(W-j) 1 (3) J i
Значения частот Wj подставляется в выражение (1). По базисным функциям модели (1) с конкретными значениями частот строится новая матрица плана для повторного использования процедуры сингулярного разложения для определения параметров AJ и BJ. Значения этих параметров используются для определения искомого веса Р из выражения
NN М
Р 2 Xi - 2 2 Aj-cos(Wj-ti) +
i 1 i 1 j 1
М
+ 2 Bj-sln(Wj-ti)(4) J 1
При измерении веса движущихся объектов возникает задача отделения постоянной составляющей сигнала, определяемой весом объекта от переменных составляющих, определяемых колебаниями объекта. При этом время измерений ограничено сверху физическими размерами измерительного участка и стремлением повысить производительность системы измерений веса, т.е, повысить скорость движения объекта через измерительный участок. Так, при длине платформы для поосного взвешивания железнодорожных составов 1,4 м, что ограничивается расстоянием между осями вагонов, и низшей частоте помехи 2 Гц скорость движения объекта не должна превышать 1,5 м/сек. Следует отметить также, что спектр колебаний движущихся объектов сосредоточен в областях 2...5 и 20...40 Гц в силу резонансных давлений в устройства подвески и амортизации. При таких условиях помехи могут быть описаны ограниченным числом гармонических колебаний. Е
результате сигнал с датчиков веса, установленных на измерительном участке представляетсяфункциональнойзависимостью (1).
Известно, что колебательные составляющие эффективно подавляются лишь в случае, когда в интервал измерения укладывается не менее двух периодов. В то же время резонансные частоты амортизирующих средств лежат в интервале единиц Герц. Таким образом, это требование вынуждает использовать измерительные участки значительных размеров и снижать скорость объектов по ним, т.е. ведет к удорожанию систем измерения веса и снижает их производительность.
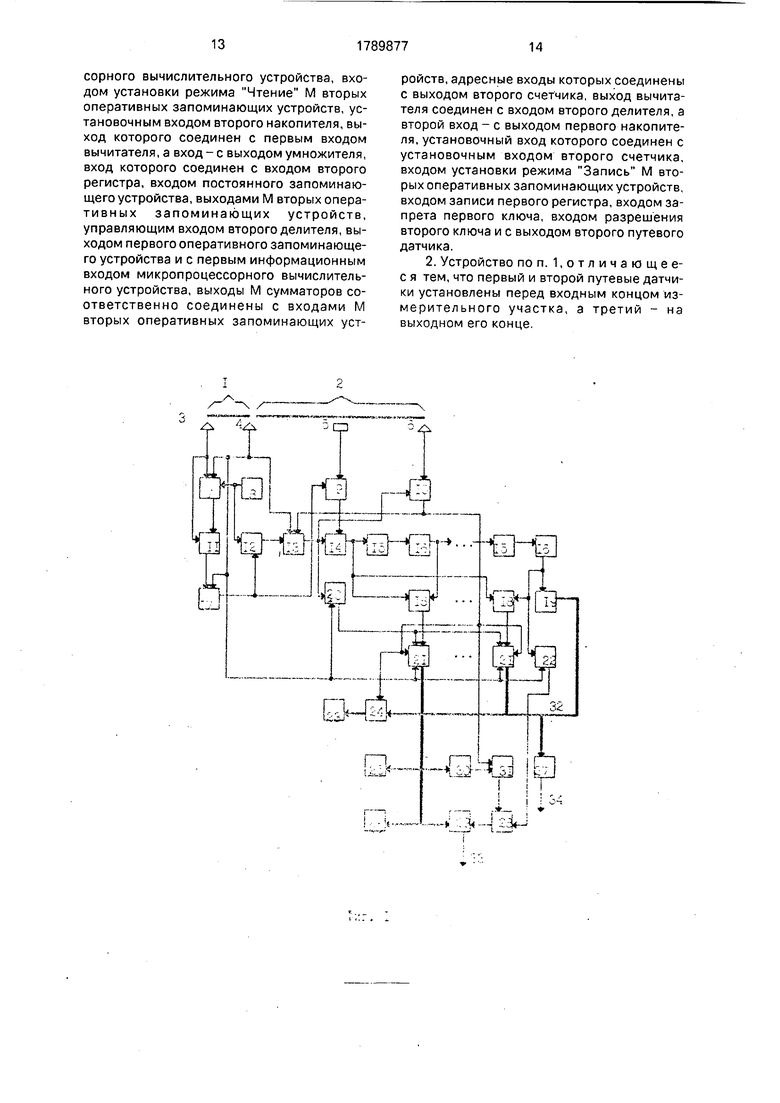
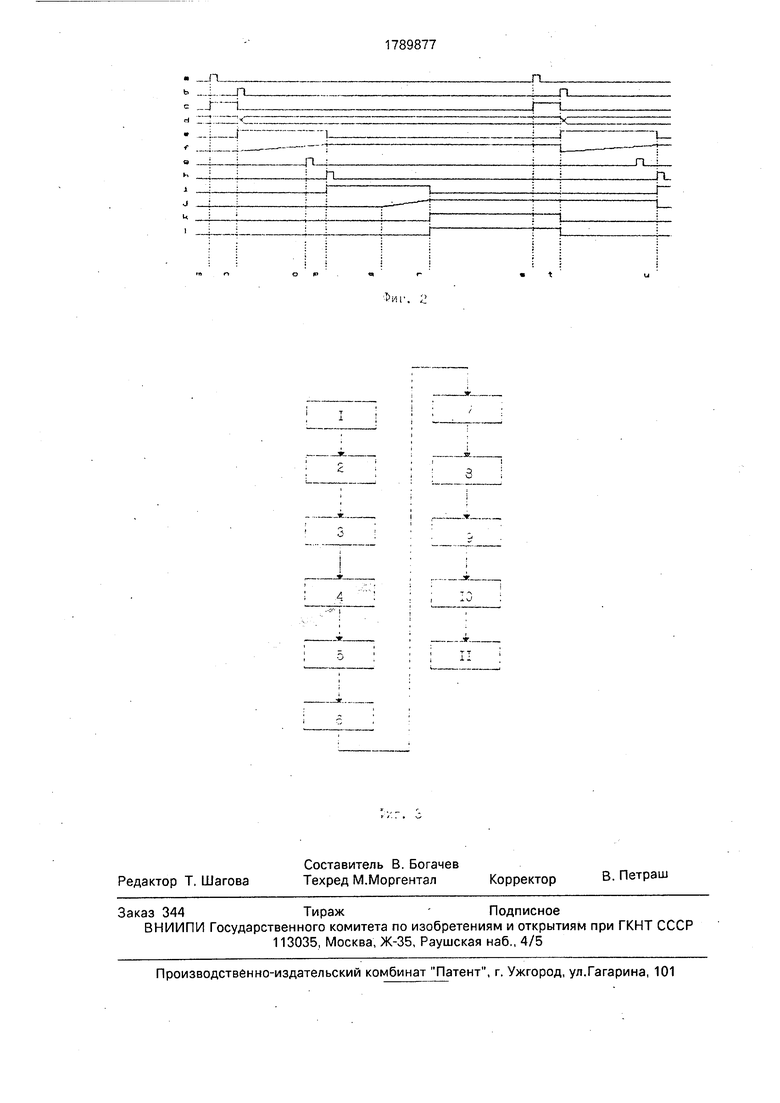
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - временная диаграмма состояний блоков устройства; на фиг. 3 - алгоритм работы микропроцессорного вычислительного устройства.
На фиг. 1 - обозначены: 1 - участок измерения скорости движения объекта, 2 - измерительный участок, 3 и 4 - первый и второй путевые датчики,. 5 - датчик веса, 6 - третий путевой датчик, 7-первый ключ, 8
- синхронизатор, 9 - аналоговый фильтр, 10
- третий блок задержки, 11 - первый счетчик, 12 - первый делитель, 13-второй ключ, 14 - аналого-цифровой преобразователь (ФЦА), 15 и 16-М первых и М вторых блоков задержки, 17 - первый регистр, 18 - М сумматоров, 19 - первое ОЗУ, 20 - второй счет- чик, 21-М вторых ОЗУ, 22 - первый накопитель, 23 - первое постоянное ЗУ. 24 - микропроцессорное вычислительное устройство (МР), 25 - второе постоянное ЗУ, 26 - индикатор, 27 - второй регистр, 28 - вычитатель, 29 - второй делитель, 30 - умножитель, 31 - второй накопитель, 32 - информационная шина, 33 - сигнал устройства Готов. Первый 3 и второй 4 путевые датчики установлены в начале и в конце участка измерения скорости движения объекта 1. Конец этого участка совпадает с началом измерительного участка 2, в конце которого расположен третий путевой датчик 6. Датчик веса 5 соединен с аналоговым фильтром 9. Выход вычитателя 28 соединен со входом второго делителя 29, а первый вход-с выходом первого накопителя 22. Установочный вход первого накопителя 22 связан вместе с установочным входом второго счетчика 20, .входом установки режима Запись вторых ОЗУ 21, входом записи первого регистра 17, входом запрета первого ключа 7 и входом разрешения второго ключа 13 с выходом второго датчика пути 4, Выход первого датчика пути 3 соединен с входом разрешения первого ключа 7
и установочным входом первого счетчика 11. Выход первого счетчика 11 связан с входом первого регистра 17, а счетный вход - выходом первого ключа 7. Вход первого
ключа 7 соединен с выходом синхронизатора 8, а также с первым входом первого делителя 12, второй вход которого связан с выходом первого регистра 17 и цифровым входом аналогового фильтра 9, а выход - со
0 входом второго ключа 13. Выход второго ключа 12 соединен со счетным входом второго счетчика 20, входом третьего блока задержки 10 и синхронизирующим входом АЦП 14, Вход 14 связан с выходом аналого5 вого фильтра 9, а выход - с первыми входами всех сумматоров 18 и через последовательно соединенные поочередно первые 15 и вторые 16 блоки задержки с входом первого накопителя 22 и входом
0 первого ОЗУ 21. Вторые входы всех сумматоров 18 соединены с выходами вторых блоков задержки 16, а выход датчика веса 5 связан со входом аналогового фильтра 9. Выход третьего путевого датчика 6 соеди5 нен с запускающим входом третьего блока задержки 10. Выход третьего блока задержки 10 соединен с входом запрета второго ключа 13, входом прерывания микропроцессорного вычислительного устройства 24,
0 входом установки режима Чтение вторых ОЗУ 21 и установочным входом второго накопителя 31. Выход второго накопителя 31 связан со вторым входом вычислителя 28. а вход - с выходом умножителя 30, информа5 ционный вход которого соединен вместе со входом второго регистра 27, входом второго постоянного ЗУ 25, выходами вторых ОЗУ 21, управляющим входом второго делителя 29 и выходом первого ОЗУ 19 через инфор0 мационную шину 32 с первым информационным входом микропроцессорного вычислительного устройства 24. Выходы сумматоров 18 соответственно соединены со входами вторых ОЗУ 21, адресные входы
5 которых связаны с выходом второго счетчика 20.
Работает устройство следующим образом.
По сигналу первого путевого датчика 3
0 (фиг. 2,а) в момент времени m при проезде объекта открывается первый ключ 7 (фиг. 2,с), а первый счетчик 11 устанавливается в начальное состояние, Первый счетчик 11 начинает счет импульсов синхронизатора 8,
5 поступающих на его вход через открытый к-люч 7, В момент прихода со второго путевого датчика 4 первый ключ 7 закрывается (фиг. 2), а информация с первого счетчика 11 переписывается в первый регистр 17 (фиг. 2. d. момент времени п). Первый делитель 12
делит частоту синхронизатора 8 на число, пропорциональное цифровому коду первого регистра 17, который обратно пропорционален скорости движения объекта, а частота на выходе первого делителя 12 будет соответственно прямо пропорциональна этой скорости, Этот же код первого регистра 17 поступает на управляемый АФ 9, изменяя его частоту среза в зависимости от скорости движения объекта и частоты дискретизации. Чем меньше частота дискретизации, тем меньше ширина полосы пропускания АФ 9. Это позволяет уменьшить число необходимых гармоник, учитываемых в сигнале, поступающем на АФ 9 с датчика веса 5. Импульс второго путевого датчика 4 устанавливает в начальное состояние второй счетчик20 и первый накопитель 22, а вторые ОЗУ 21 устанавливает в режим Запись. Этим же импульсом второго датчика пути 4 открывается второй ключ 13 (фиг. 2,е), и импульсы с первого делителя 12 начинают поступать на синхронизирующий вход АЦП 14 и счетный вход второго счетчика 20. Каждый импульс со второго ключа 13 вызывает оцифровывание выходного сигнала АФ 9 и переключение второго счетчика 20. Данные с АЦП 14 задерживаются последовательной цепью первых 15 и вторых 16 блоков задержки. Сумматоры 18 суммируют данные со входа первого блока задержки 15 и выходов вторых блоков задержки 16, формируя значения суммы XK-j + XK+J. Для первого сумматора j 1, т.е. Хк-1 + Хк+1, для второго - Хк-2 + Хк+2 и так далее до М-го сумматора, для которого j М, Х«-м + Хк+м. Эти значения записываются в соответствующие массивы вторых ОЗУ 21 по адресам, установленным вторым счетчиком 20. Одновременно измеряемые данные накапливаются в первом накопителе 22 для дальнейшего использования (фиг.2,т). Процесс длится до прихода импульса с третьего путевого датчика 6 (фиг. 2,), который вырабатывается при съезде объекта с измерительного участка 2 (фиг. 2, момент времени о). В третьем блоке задержки 10 импульс задерживается на время, соответствующее 2М импульсам на выходе второго ключа 13 для того, чтобы данные, находящиеся в цепочке первых 15 и вторых 16 блоков задержки, были занесены в первое ОЗУ 19 (фиг, 2, h, момент времени р). Задержанный импульс третьего путевого датчика 6 устанавливает вторые ОЗУ 21 в режим Чтение и второй накопитель 31 в начальное состояние (фиг. 2,j), закрывает второй ключ 13 (фиг. 2,е), а также вызывает прерывание МП 24, которое переходит к работе по программе обработки прерываний (фиг. 2,i, моменты
времени p,q,r), записанной в первое постоянное 23. Алгоритм программы приведен на фиг. 3. В результате описанной части работы устройства во вторых ОЗУ 21 сформированы массивы данных, которые рассматриваются как столбцы матрицы плана для определения методом сингулярного разложения коэффициентов пропорциональности QJ из выражения (2). Для этого
0 после выполнения начального блока обработки прерывания (блок 1, фиг. 3) программа в блоке 2 формирует матрицу сингулярных чисел, левый и правый сингулярные вектора, в соответствии с алгоритмом, подробно
5 приведенным в литературе Дж.Форсайт, М.Малькольм, К.Моулер. Машинные методы математических вычислений. М. Мир, 1980 , стр,220. Процедура сингулярного разложения позволяет определить коэффициенты QJ
0 при базисных функциях, а также значимость вклада этих функций по величине сингулярных чисел. Это дает возможность отказаться от учета незначимых составляющих (блок 3). Остальные коэффициенты определяются
5 в блоке 4. В блоке 5 по формуле (3) определяются соответствующие частоты Wj, причем вычисления тригонометрических- функций выполняются с помощью второго постоянного ЗУ 25. Полученные значения
0 частот Wj используются для разложения сигнала по базису тригонометрических функций в соответствии с (1). По этому базису формируется другая матрица плана, состоящая из столбцов каждой функции cos(Wj ti)
5 или sin(Wj ti) для всех I 1, N, (блок 6). По синтезированной матрице плана аналогично блоку 2 формируются матрица сингулярных чисел, левый и правый сингулярные вектора (блок 7). В блоке 8 определяются
0 значения коэффициентов А и Bj. В блоке 9 МП, работая совместно с умножителем 30. получает произведения: Aj cos(Wj tj) и Bj sin(Wj-tj) Произведения накапливаются во вто5 ром накопителе 31 (фиг. 2,j, моменты времени q,r). К второму моменту времени во втором накопителе содержится сумма N значений этих произведений. Вычитатель образует разность между этой суммой и сум0 мой измеренных данных, хранящейся в первом накопителе. По окончании суммирования МП в блоке 10 выдает разрешение работы второму делителю 29. который делит эту разность на N. Результат,
5 полученный со второго делителя 29, описывается выражением (4). Одновременно МП устанавливает сигнал готовности устройства Готов 34 во втором регистре 27. В блоке 11 МП выводит результат на индикатор 26 v заканчивает работу по программе до прихода следующего прерывания либо функционирует по дополнительной программе. На фиг. 2 (моменты времени s, t, u) показано начало нового цикла работы устройства.
Пример конкретного исполнения. Путевые датчики 3, 4, 6 - серийно выпускаемые промышленностью типа БВК, датчик веса 5 - могут быть любыми датчиками (тензо- метрическими, механотронными, фотоэлектрическими и т.д.). Ключи 7 и 13-выполнены на логических элементах со стробировани- ем и RS-триггером для хранения состояний на микросхемах (МС) серии К155. Сихрони- затор 8 - генератор на МС серии К555. Аналоговый фильтр 9 - управляемый фильтр с цифроаналоговым преобразователем управляющего напряжения, схема фильтра приведена в литературе Справочник по расчету и проектированию ARC-схем. п/р А. А.Ланнэ, М., Р. и св., 1984 г., стр.343, на МС серии К544УД. Блок задержки 10 - реверсивный счетчик с триггером и загрузкой дан- ных. Счетчики 11 и 20 - на МС К555. Делители 12 и 29 - на МС КР1802 ВР2. АЦП 14 - 1108ПВТ. Блоки задержки 15 и 16 - на многоразрядных регистрах типа КР555ИР23.27. Регистры 17 и 27 - МС типа КР555ИР23,27, Сумматоры 18 - МС серии 155 и 555. (ОЗУ 19 и 21 - на МС КП537РУ10
со схемами обрамления. Накопители 22 и 31 - сумматоры и регистры на МС серии К155, К555. Первое постоянное ЗУ 23 - МС к5733РФ4,6. МП 24 - на МС серии
К1801ВМ2, Второе постоянное ЗУ 25 - МС К573РФ4,6. Индикатор 26-любое устройство, отображающее информации, например, цифровая шкала на индикаторах АЛСЗЗВ. Вычитатель 28 - на МС серии К155, К555.
Умножитель 30 - МС КП1802ВР2.
Предлагаемое изобретение позволяет определить все параметры существующих колебаний в тренде измеренного сигнала, восстановить эти колебания, автоматически
компенсировать их и по уже очищенному сигналу путем усреднения получить вес объекта, Устройство допускает уменьшение размеров измерительного участка при одновременном повышении скорости движения
объекта, так как некритично к величине амплитуды динамических составляющих помех. Кроме того, не требуется наличие двух периодов колебаний наиболее низкочастотной помехи. Так при условиях, рассматриваемых в описании изобретения выше, при частоте дискретизации 500 Гц для снятия 60 отсчетов скорость движения объекта может достигать 12 м/сек против 1,4 м/сек, обеспечиваемых прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ взвешивания движущихся объектов | 1990 |
|
SU1800269A1 |
| Способ взвешивания движущихся объектов | 1990 |
|
SU1732175A1 |
| Устройство контроля аналого-цифровых преобразователей | 1988 |
|
SU1711327A1 |
| Устройство для контроля радиоэлектронных объектов | 1990 |
|
SU1714622A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ПРЕЦИЗИОННЫЙ ЧАСТОМЕР ПРОМЫШЛЕННОГО НАПРЯЖЕНИЯ | 2006 |
|
RU2333501C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА ИЗОБРАЖЕНИЯ ИНТЕРФЕРОГРАММ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2448431C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 1997 |
|
RU2116630C1 |
| Устройство для контроля и управления технологическими процессами испытаний и тренировки фотоэлектронных умножителей | 1988 |
|
SU1517041A1 |
Сущность изобретения: устройство содержит 1 участок скорости движения объекта (1), 1 измерительный участок (2), 3 путевых датчика (3, 4, 6), 1 датчик веса (5), 2 ключа (7 , 13), 1 синхронизатор (8), 1 аналоговый фильтр (6), 1 блок задержки 10, 2 счетчика
Формула изобретения 1. Устройство для взвешивания движущихся объектов, содержащее первый и второй путевые датчики, датчик веса, синхронизатор, первый счетчик, первый и второй регистры, вход которого соединен с индикатором, первым оперативным запоминающим устройством и первым информационным входом микропроцессорного вычислительного устройства, второй информационный вход которого соединен с входом первого постоянного запоминающего устройства, отличающееся тем, что, с целью повышения точности в него введены третий путевой датчик, первый и второй ключи, второй счетчик, первый и второй делители, аналоговый фильтр, аналого-цифро- вой преобразователь, М первых и М вторых блоков задержки, М вторых оперативных запоминающих устройств, М сумматоров, третий блок задержки, первый и второй накопители, второе постоянное запоминающее устройство, умножитель, вычитатель, причем выход первого путевого датчика соединен с входом первого ключа и установоч- ным входом первого счетчика, выход
которого соединен с входом первого регистра, счетный вход первого счетчика соединен с выходом первого ключа, вход управления которого соединен с выходом синхронизатора и первым входом делителя, второй вход которого соединен с выходом первого регистра и цифровым входом аналогового фильтра, а выход - с входом второго ключа, выход которого соединен со счетным входом второго счетчика, входом третьего блока задержки и синхронизирующим входом аналого-цифрового преобразователя, вход которого соединен с выходом аналогового фильтра, а цифровой выход - с первыми входами М сумматоров, через последовательно соединенные М первые и М вторые блоки задержки с входом первого накопителя, входом первого оперативного запоминающего устройства, вторые входы М сумматоров соединены с выходами М вторых блоков задержки, выход датчика веса соединен с входом аналогового фильтра, выход третьего путевого датчика соединен с входом третьего блока задержки, выход которого соединен с входом запрета второго ключа, входом прерывания микропроцессорного вычислительного устройства, входом установки режима Чтение М вторых оперативных запоминающих устройств, установочным входом второго накопителя, выход которого соединен с первым входом вычитателя, а вход-с выходом умножителя, вход которого соединен с входом второго регистра, входом постоянного запоминающего устройства, выходами М вторых оперативных запоминающих устройств, управляющим входом второго делителя, выходом первого оперативного запоминающего устройства и с первым информационным входом микропроцессорного вычислительного устройства, выходы М сумматоров соответственно соединены с входами М вторых оперативных запоминающих устройств, адресные входы которых соединены с выходом второго счетчика, выход вычитателя соединен с входом второго делителя, а второй вход-с выходом первого накопителя, установочный вход которого соединен с установочным входом второго счетчика, входом установки режима Запись М вторых оперативных запоминающих устройств, входом записи первого регистра, входом запрета первого ключа, входом разрешения второго ключа и с выходом второго путевого датчика.
. ;2
| Устройство для взвешивания движущихся объектов | 1985 |
|
SU1288506A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
