1
Изобретение относится к технической физике, в частности к геофизическому приборостроению, и может быть использовано при сейсмических исследованиях осадочной толщи на акваториях методом отражения волн.
Для интерпретации результатов сейсмических измерений необходимо знать точное положение сейсмокосы относительно судна во время приема сейсмических сигналов.
Известна система для определения положения секций морской сейсмокосы, которая включает в себя устройство, расположенное на корме судна-буксира и подсоединенное к ближнему концу косы через универсальный шарнир с двумя степенями свободы, и кронштейн, связанный с двумя сервомеханизмами, которые воспринимают перемещение указанного кронштейна, два маятниковых потенциометра, один из которых чувствителен к крену судна, второй - к его маневрам по тангажу, и установленные в косе магнитный компас и тензометры, воспринимающие продольное натяжение косы. Названные элементы отдельными проводниками из жгута косы соединены с бортовым устройством обработки информации, включающим в себя аналого-цифровые преобразователи, интерфейс, процессор и магнитный накопитель 1.
эта система позволяет регистрировать движения только ближней к судну части косы, обусловленные килевой и бор5 ТОБОЙ качкой.
Наиболее близким техническим peuiLHiiем к предлагаемому является система для контроля положения секций морской многоканальной сейсмокосы, содержащая
10 индикатор, вычислитель, генератор синхроимпульсов, генератор отметки момента излучения колебаний и в каждом канале приемник колебаний и последовательно включенные счетчик импульсов, двуузходовый вентиль и триггер с установочным i; предустановочным входами, при этом сигна. вход двухвходового венти.,1п соединен с выходом генератора синхроимпульсов, а выход счетчика импульсов подключен к входу вычислителя. Кроме того,
20 канал данной системы содержит специальный приемник ультразвуковых колебаний (трансдуктор) 2.
Недостаток известной системы - необходимость применения специальных источника колебаний и приемников (трансдукторов), каждый из которых соединен с бортовой аппаратурой парой проводов.
Целью изобретения является повышение точности и упрощение системы.
Поставленная цель достигается тем, что в систему для контроля положения секций морской многоканальной сейсмокосы, содержащую индикатор, вычислитель, генератор синхроимпульсов, генератор отметки момента излучения колебаний и в каждом канале приемник колебаний и последовательно включенные счетчик импульсов, двувходовый вентиль и триггер с установочным и предустановочным входами, при этом сигнальный вход двувходового вентиля соединен с выходом генератора синхроимпульсов, а выход счетчика импульсов подключен к входу вычислителя, введены датчик времени распространения сейсмической волны и в каждом канале между приемником колебаний и триггером последовательно включенные формирователь, детектор и устройство выделения первых вступлений прямой сейсмической волны, выход которого подключен к предустановочному входу триггера в своем канале и установочному входу триггера в следующем канале, причем установочный вход триггера в первом канале подключен к выходу генератора отметки момента излучения колебаний, а выход датчика времени распространения сейсмической волны подключен к входу вычислителя.
В данной системе в каждом канале фиксируется время вступления непосредственно прямой сейсмической волны, при этом измеряется время ее распространения от сейсмоприемника в (п-1)-й секции до сейсмоприемника, размещенного в п-й секции, полученный результат суммируется с временем распространения упругой волны от источника до сейсмоприемника в (п-1)-й секции.
Так как затухание амплитуды, проходящей между двумя соседними секциями волны, выражено в значительно меньщей степени, то абсолютная погрещность измерения времени ее распространения между этими секциями из-за вызванных указанным затуханием задержек срабатывания дискриминатора определяется разностью второго порядка. Благодаря этому достигается повышение точности измерения расстояния от источника упругих волн до каждой секции, т. е. повышается точность определения положения косы относительно буксирующего ее судна.
Повыщенная точность предложенного метода позволяет использовать для определения положения секций сейсмокосы не ультразвуковые колебания, а колебания низкочастотного диапазона. В частности, для этих измерений предлагается фиксировать вре.мя распространения непосредственно
прямой сейсмической волны. Это позволяет существенно упростить систему, поскольку исключается специальный источник колебаний, трансдукторы и уменьшается число проводов линии связи.
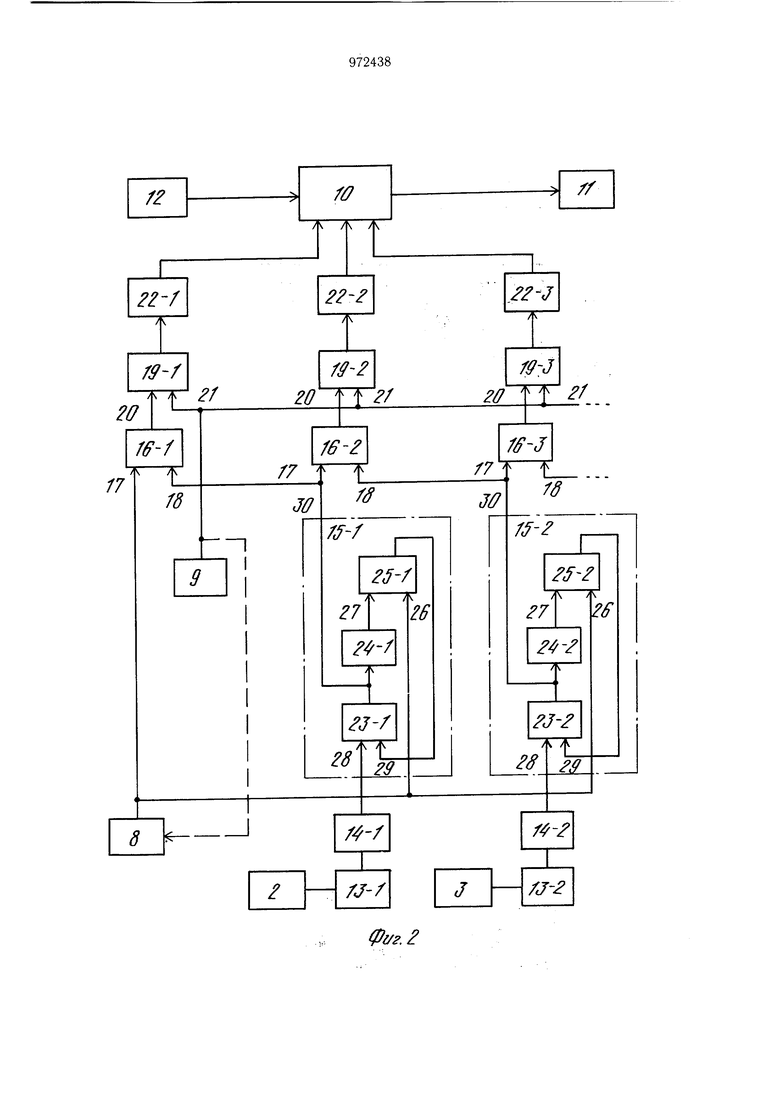
На фиг. 1 показано расположение секций морской сейсмокосы при ее буксировке; на фиг. 2 - схема бортовой части системы для контроля положения секций морской сейсмокосы; на фиг. 3 - схема датчика
0 времени распространения сейсмической волны между двумя контрольными точками. Система состоит из источника 1 упругих колебаний, п сейсмоприемников 2-6 (для упрощения чертежа п 6) и бортового устройства 7, которое содержит генератор 8
отметки момента излучения, генератор 9 синхроимпульсов, вычислитель 10, индикатор 11 и датчик 12 времени распространения прямой сейсмической волны между двумя контрольными точками.В каждом из сей1 сморегистрирующих каналов установлены формирователи 13.1 и 13.2 амплитуды принятых колебаний, детекторы 14.1 и 14.2 принятых колебаний устройства 15.1 и 15.2 выделения первых вступлений прямой волны, триггеры 16.1 -16.3 с установочными входами
5 17.1 -17.3 и предустановочными входами 18.1 -18.3, двувходовые вентили 19.1 -19.3, первые входы 20.1-20.3 которых подключены к выходам триггеров 16.1 -16.3, а вторые входы 21.1-21.3 - к выходу генератора 9, и счетчики 22.1-22.3 импульсов.
Каждое устройство 15.1 и 15.2 выделения первых вступлений прямой волны содержит выходные вентили 23.1 и 23.2, линии задержки 24,1 и 24.2 импульсов и вторые триггеры 25.1 и 25.2 с установочными 26.1 и 26.2 и предустановочными 27.1 и 27.2 входами. Установочные входы 26.1 и 26.2 триггера подключены к выходу генератора 8, а предустановочные входы 27.1
0 и 27.2 через линии задержки 24.1 и 24.2 подключены к выходам вентилей 23.1 и 23.2 Входы 28.1 и 28.2 вентилей 23.1 и 23.2 подключены к выходам детекторов 14.1 и 14.2, входы 29.1 и 29.2 - к выходам триггеров 25.1 и 25.2. Выходы 30.1 и 30.2
устройств 15.1 и 15.2 в каждом канале подключены к входам 18.1 -18.3 своего канала и к входам 17.1 -17.3 следующего канала.
. Датчик 12 времени распространения прямой сейсмической волны между двумя контрольными точками содержит счетчик 31 импульсов, двухводовый вентиль 32 и триггер 33, предустановочный вход 34 которого через усилитель 35 колебаний подключен к
5 сейсмоприемнику 36, размещенному в начале контрольного отрезка, а установочный вход 37 через второй усилитель 38 подключен к сейсмоприемнику 39, размещенному на конце контрольного отрезка.
Система работает следующим образом.
Генератор 8 формирует серию импульсов, соответствующих моменту излучения упругих колебаний. Указанные импульсы поступают на входы 26.1 и 26.2 триггеров
25.1и 25.2 и устанавливают названные триг геры в исходные (единичные) состояния. Прямая волна возбужденных сейсмических колебаний поочередно достигает сейсмоприемники 2-6. расположенные соответственно
в первой, второй и т. д. секциях косы. Принятые сейсмоприемниками колебания преобразуются ими в электрический сигнал, который по проводной линии передается на бортовое устройство.
Импульсы с входа генератора 8 поступают также на вход 17 триггера 16.1 в канале обработки информации от сейсмоприемника первой секции и устанавливают его в единичное состояние. Триггер 16.1 своим выходом открывает вентиль 19.1 и пропускает на счетчик 22.1 синхроимпульсы с генератора 9. Формирователь 13.1 и детектор 14.1 преобразуют поступающие электрические колебания в последовательность прямоугольных импульсов. Последние поступают в устройство 15.1 на вход 28 вентиля 23.1. На второй вход 29 вентиля 23.1 поступает разрешающий (единичный) сигнал с выхода триггера 25.1. Вентиль 23.1 пропускает первый импульс из последовательности прямоугольных импульсов, который поступает через линию 24.1 задержки на вход 27 триггера 25.1 и переводит последний в нулевое состояние. Триггер 25.1 своим выходом запирает вентиль 23.1 и не пропускает на выход 30 устройства 15.1 следующие прямоугольные импульсы до прихода очередного импульса с генератора 8. Тем самым из последовательности прямоугольных импульсов вырезается первый импульс.
Импульс с выхода 30 устройства 15.1 поступает на вход 18 триггера 16.1 в первом канале и переводит последний в нулевое состояние. Триггер 16.1 запирает своим выходом вентиль 19.1 и прекращает поступление синхроимпульсов в счетчик 22.1, в котором фиксируется интервал времени, соответствующий времени прохождения прямой волны от источника 1 до сейсмоприемника 2. Одновременно импульс с выхода 30 устройства 15.1 поступает на вход 17 триггера 16.2 во втором канале и переводит последний в единичное состояние. Триггер
16.2открывает вентиль 19.2 и пропускает
на счетчик 22.2 синхроимпульсы с генератора 9. Счетчик 22.2 измеряет интервал времени прохождения прямой волной от сейсмоприемника 2 до сейсмоприемника 3.
Электрический сигнал с сейсмоприемника 3 аналогичным образом преобразуется в одиночный импульс, который переводит триггер 16.2 в нулевое состояние, а триггер 16.3 в единичное. Работа устройства в остальном протекает аналогично. Полученные коды временных интервалов поступают в вычислитель 10, куда одновременно поступают данные с задатчика 12. Вычислитель 10 полученные данные обрабатывает и выдает их на индикатор 11 для отображения. С приходом следующего импульса возбуждения работа устройства повторяется.
Скорость распространения упругих колебаний зависит от солености, температуры воды и других факторов. Зная время распространения колебаний между двумя контрольными точками, можно определить точное расстояние между двумя сейсмоприемниками.
Таким образом, данная система позволяет повысить точность определения положения секций сейсмокосы относительно судна при буксировке, причем контролируется положение каждого сейсмоприемника косы и существенно упрощается измерительная система за счет исключения дополнительного источника колебаний, специальных приемников акустических колебаний (трансдукторов), линий их связи с бортовым вычислителем и т. п.
Формула изобретения
Система для контроля положения секций морской многоканальной сейсмокосы, содержащая индикатор, вычислитель, генератор синхроимпульсов, генератор отметки момента излучения колебаний и в каждом канале приемник колебаний и последовательно включенные счетчик импульсов, двувходовый вентиль и триггер с установочным и предустановочными входами, при этом сигнальный вход двувходового вентиля соединен с вы.ходом генератора синхроимпульсов, а выход счетчика импульсов подключен к входу вычислителя, отличающаяся тем, что, с целью повыщения точности и упрощения системы, в нее введены датчик времени распространения сейсмической волны и в каждом канале между приемником колебаний и триггером последовательно включенные фор.мирователь, детектор и устройство выделения первых вступлений прямой сейсмической волны, выход которого подключен к предустановочному входу триггера в своем канале и установочному входу триггера в следующем канале, причем установочный вход триггера в первом канале подключен к выходу генератора отметки момента излучения колебаний, а выход датчика времени распространения сейсмической волны подключен к входу вычислителя.
Источники информации, принятые во вни.мание при экспертизе 1. Патент США № 4068208, кл. 340-7, опублик. 1977.
2. Патент США № 3840845, к.п. 340-7, опублик. 1974 (прототип).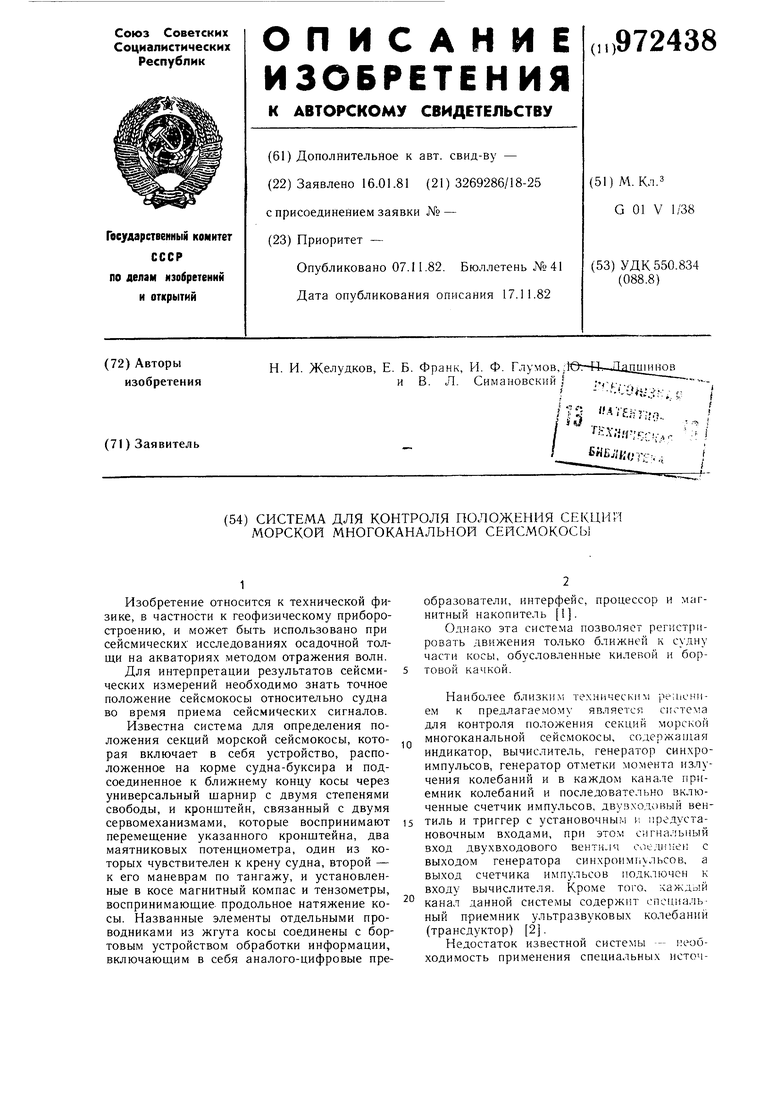
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МНОГОВОЛНОВОЙ СЕЙСМОРАЗВЕДКИ | 1990 |
|
SU1813297A3 |
| Многоканальное цифровое устройство для морских сейсмических исследований | 1980 |
|
SU972431A1 |
| Индуктивный сейсмоприемник для сейсмической морской косы | 1977 |
|
SU894641A1 |
| Процессор быстрого преобразования Фурье | 1985 |
|
SU1254506A1 |
| Система для управления морскими сейсмическими исследованиями | 1986 |
|
SU1376052A1 |
| Цифровая телеметрическая система для морских сейсмических исследований | 1982 |
|
SU1037317A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ СЕЙСМИЧЕСКОЙ ИНФОРМАЦИИ В МОРСКОЙ СЕЙСМОРАЗВЕДКЕ | 1992 |
|
RU2085970C1 |
| СИСТЕМА ДЛЯ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2008 |
|
RU2392643C2 |
| Электроразведочная станция | 1981 |
|
SU1004937A1 |
| МОРСКОЕ СЕЙСМОПРИЕМНОЕ УСТРОЙСТВО | 1998 |
|
RU2137157C1 |

1Й
01/г. J
