со
Од
о сд (О
Изобратение относится к технической физике, в частности к геофизическому приборостроению, и может быть использовано при морских сейсмичес ских исследованиях с помощью буксируемых приемных устройств, а именно аналоговых и цифровых сейсмометрических кос с пьезоэлектрическим гидрофоном и датчиками глубины погружения.д
Цель изобретения - повышение качества сейсмометрических данных путем минимизации уровня буксировочных аумов при буксировке группы М пьезо- кос.15
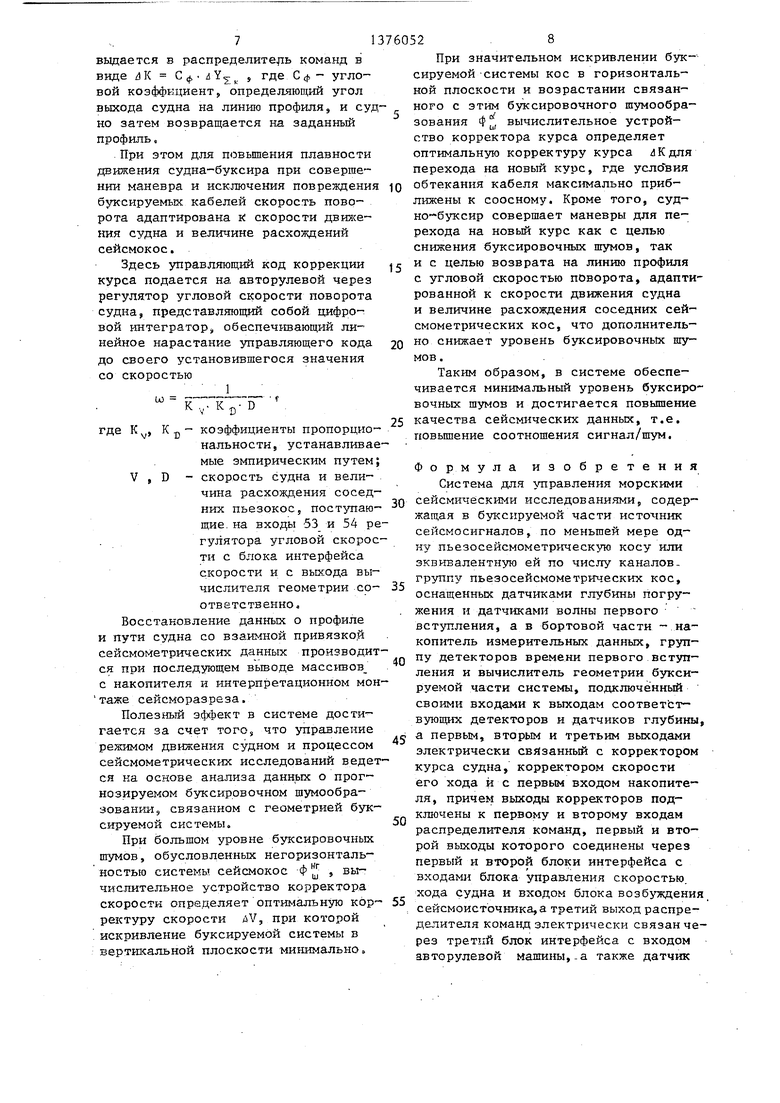
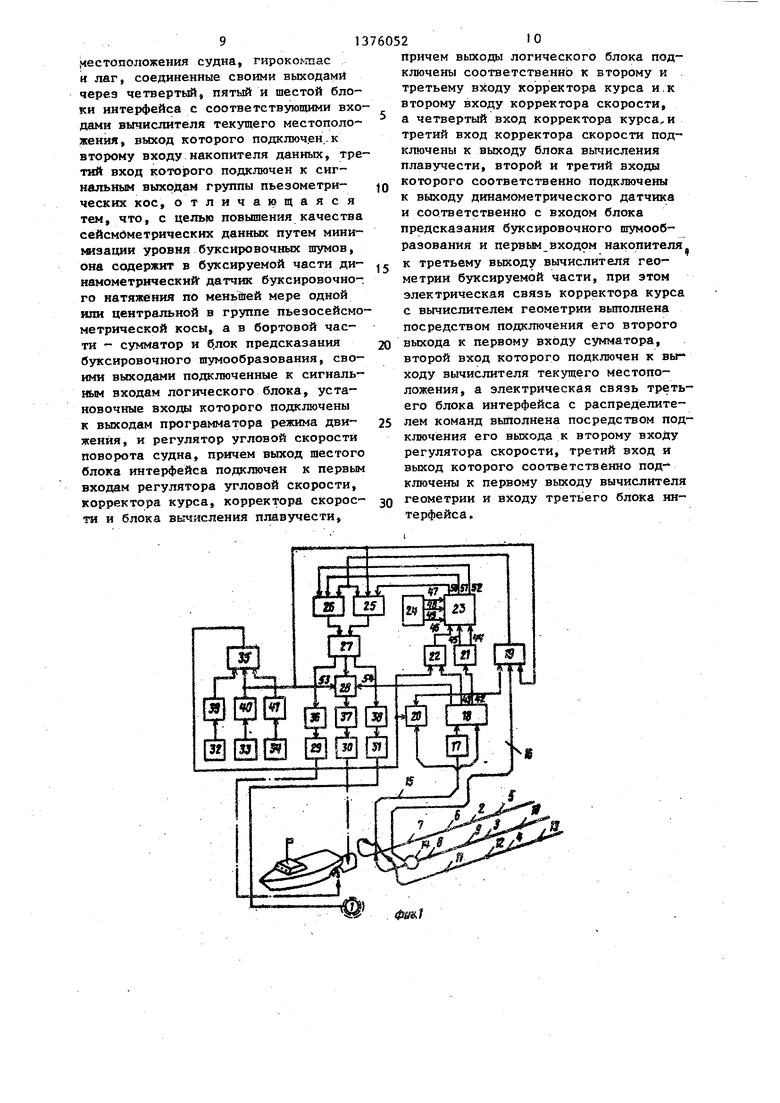
На фиг.1 изображена функциональ- ная схема системы; на фиг.2 - диаграмма геометрических соотношений для буксируемой системы.
Система содержит в буксируемой 20 части сейсмоисточник 1 упругих волн давления, а также группу () сейсмометрических пьезокос 2-4, состоящих из отдельных идентичных секций, границы которых условно обозначены 25 положением глубинных датчиков 5-13 типа приемников гидростатического давления и гидрофонных пьезоэлектрических датчиков волны первого вступления. В датчики 5 - 13 входят из- 30 вестные электроннь е узлы первичного прео.браяованйя (усиления) и временного уплотнения преобразованных сигналов, Парвая секдйя центральной сей- CMOKOCfc оснащена динамометрическим .з датчиком 14 напряжения s вьшолненньгм, например, на основе пьезоэлектрического шш пьезорезйстивного прибора с интерфейсом оцифровки, Информацион- поток с датчиков 5 13 по сбор- 40 ному Ka6ejao 15 постут1ае;т в бортовую часть 16 системы. Бортовая часть системы содержит группу временньгх детекторов 17 первых вступлен1$й типа уси- Л15телей-ограничителей, вычислитель дз 18 геометрии буксируемых пьезокос 2 - 4, вычислитель 9 плав:/чести центральной буксируемой косы в группеj накопитель 20 сейсмических данных, дополненных данными о положении сейс- Q мокос и даикьми о текущем местополо- кении судка, а также блок 21 предсказания буксировочного шумообразйва- ния, сумматор 22, логический блок 23,
да судна, авторулевую машину 30j блок 31 управления моментом возбуждения сейсмоисточника;, гирокомпас 32, лаг 33, датчик 34 текущего местоположения судна, вычислитель 35 текущего местоположения судна.
Для ввода сигналов в блок 29 управления скоростью хода, в блок 31 возбуждения сейсмоисточника и авторулевую машину 30 используются пер- вый 36, третий 37 и второй 38 блоки интерфейса. Для ввода сигналов гирокомпаса 32J лага 33 и датчики 34 мес тоположения судна используют четвертый 39, пятый 40 и шестой 41 блоки интерфейса.
Вычислитель 18 геометрии, блок 21 предсказания буксировочного шумо- образования5вычислитель 19 плавучести сумматор 22 могут быть выполнены,например, в виде мини-ЭВМ или специализированного микропроцессорного устройства,г
Корректопы скорости и курса представляют собой микропроцессорные уст ройства, запрограммирован1Л1е на вы- - числение оптимальных величин корректуры скорости и курсаS используя уравнения стацконарпой кснфигурацик буксируемого кабеля одпиз из численных методов например матодом Рунге- Кутта Логический блок 23 вьшолнен в виде регкстров ввода и сравнения кодов двоич1л,п чисел f а пporpa fмaтop 24 режима в тище регистров хракания кодов с внешней клавиатурой для вво да значений допустимого отклонения буксируемой CKCTe;.Gi от линии профиля .дУдр„ , а также предельных уровней .
бЗГКСИрОВОЧКЬК rayiv OB Ф шй с-Распределитель 27 кома1Щ выполнен Б виде двухвходового трехнаправлан- кого цифрового коАГмутатора с временным разделенийм каналов
Блоки 39 - 41 гш герфейса V d- рокомпаса,. лага н дгтчш.а 7 екуд .-.го местоположения (, фг зовой радионавигацкончой системы) соотват ственко лредставг яют собой праобра- 3 сват ели угол - код,, кодируюиие уг- лозое положение, репитеров клн деко- метров,
Злокн 36 и 37 кктерфейса преобрапрограм «1атор 24 режима движения, кор- зовакия цифровой пнформацни в аналоректор 25 скорости, корректор 26 кур са, распределитель 27 команд, регулятор 28 угловой скорости поворота суд- ад, блок 29 управления скоростью хоговую для ксполнитепькьк устройств блока упразпенкя скоростью кода к авторулевой машины П1эедставлг;к т собой цифроаыалоговый (реобразоратели.
да судна, авторулевую машину 30j бло 31 управления моментом возбуждения сейсмоисточника;, гирокомпас 32, лаг 33, датчик 34 текущего местоположения судна, вычислитель 35 текущего местоположения судна.
Для ввода сигналов в блок 29 управления скоростью хода, в блок 31 возбуждения сейсмоисточника и авторулевую машину 30 используются пер- вый 36, третий 37 и второй 38 блоки интерфейса. Для ввода сигналов гирокомпаса 32J лага 33 и датчики 34 местоположения судна используют четвертый 39, пятый 40 и шестой 41 блоки интерфейса.
Вычислитель 18 геометрии, блок 21 предсказания буксировочного шумо- образования5вычислитель 19 плавучести сумматор 22 могут быть выполнены,например, в виде мини-ЭВМ или специализированного микропроцессорного устройства,г
Корректопы скорости и курса представляют собой микропроцессорные устройства, запрограммирован1Л1е на вы- числение оптимальных величин корректуры скорости и курсаS используя уравнения стацконарпой кснфигурацик буксируемого кабеля одпиз из численных методов например матодом Рунге- Кутта Логический блок 23 вьшолнен в виде регкстров ввода и сравнения кодов двоич1л,п чисел f а пporpa fмaтop 24 режима в тище регистров хракания кодов с внешней клавиатурой для вво да значений допустимого отклонения буксируемой CKCTe;.Gi от линии профиля .дУдр„ , а также предельных уровней .
бЗГКСИрОВОЧКЬК rayiv OB Ф шй с-Распределитель 27 кома1Щ выполнен Б виде двухвходового трехнаправлан- кого цифрового коАГмутатора с временным разделенийм каналов
Блоки 39 - 41 гш герфейса V d- рокомпаса,. лага н дгтчш.а 7 екуд .-.го местоположения (, фг зовой радионавигацкончой системы) соотват ственко лредставг яют собой праобра- 3 сват ели угол - код,, кодируюиие уг- лозое положение, репитеров клн деко- метров,
Злокн 36 и 37 кктерфейса преобраговую для ксполнитепькьк устройств блока упразпенкя скоростью кода к авторулевой машины П1эедставлг;к т собой цифроаыалоговый (реобразоратели.
Блок 38 интерфейса представляет собой управляеь1ый делитель частоты,
Вычислитель 35 текущего положения судна выполнен, например, на базе мини-ЭВМ ЕС 101 О или эквивалентного ей по функциям Ъ1икропрограммного устройства для совместной обработки данных гирокомпаса, для определения счислимых координат судна и радио- навигационной системы в качестве элементов обсервации. Накопитель 20 данных сейсмометрии, геометрии буксируемой части системы и текущего местоположения судна вьшолнен, как и в известной системе, в виде устройства усиления, кодирования, уплотнения и сбора на магнитном носителе выборок сейсмосигнала в цифровой форме, снабженного заполненными данными о текущем местоположении судна и цифровыми данными о геометрии буксируемой системы в момент приема. Известен также вариант выполнения накопителя 20 в виде циф- ровой сейсмостанции с накопителем данн{ к о геометрии и местоположении судна на общем магнитном накопителе.
Система работает следующим образом.
Буксируемая часть системы в реальных условиях сейсмометрических исследований может попадать в области локальных изменений температуры и солености морской воды, слойных течений или же в условиях, когда необходимо маневрирование. В э-гих случаях пространственное положение косы в горизонтальной и вертикальной плоскостях таково, что возникает не / только касательная, но и ортогональная составляющая буксировочного водного давления на секции косы, в ито порождается эквивалентное.псевдозвз новое избыточное давление, восприни
JQ 5 20 25
30
.Q 45
35
маемое гидрофонами как низкочастотные сейсмосигналы, а в действительности - буксировочные шумы. Уровень этих шумов различен в зависимости от скорости хода, а его прямой анализ в реальном времени при большой пропускной способности (большой канальности буксируемой части) вообще трудно выполним. Поэтому в систему (фиг.1) f введен блок 21 предсказания буксировочного шумообразования, действующий не на основе данных о псевдозвуковом давлении, а о пространственньк эволю- циях кос, порождающих такое давление и буксировочный щум. Для его сниже- ния система путем коррекции скорости хода судна по данным о глубине погру жения секции и вычисленной плавучести кос определяет оптимальную скорость движения судна и путем коррекции судна по данньм о пространственном расположении секции и вычисленном среднем угле oткJl oнeния системы буксируемых кос относительно линии движения определяет оптимальный курс, при котором система буксируемых кос располагается вдоль линии движения судна, т.е. условия обтекания системы кос водным потоком максимально приближе ны к случаю соосной буксировки и шу- мообразование минимально.
Детекторы 17 первых вступлений фиксируют время t распространения прямой волны от источника 1 до i-ro сейсмоприемника с помощью измерителей временных интервалов в каждом канале. I . .
Эти результаты и данные о глубине погружения секций косы используются вычислителем 18 геометрии кос для определения конфигурации кос в пространстве посредством решения систе- мы уравнений


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической стабилизации судна с буксируемой сейсмопьезокосой на заданной траектории | 1978 |
|
SU744484A1 |
| НАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2121133C1 |
| СИСТЕМА И СПОСОБ 3D ИССЛЕДОВАНИЯ МОРСКОГО ДНА ДЛЯ ИНЖЕНЕРНЫХ ИЗЫСКАНИЙ | 2015 |
|
RU2608301C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА С ИСПОЛЬЗОВАНИЕМ БУКСИРУЕМЫХ КОМПОНЕНТОВ, НАХОДЯЩИХСЯ НИЖЕ ПОВЕРХНОСТИ ВОДЫ | 2015 |
|
RU2672044C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2010 |
|
RU2487374C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2013 |
|
RU2570428C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ ПОДВОДНОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2016 |
|
RU2621638C1 |
| СИСТЕМА ДЛЯ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2008 |
|
RU2392643C2 |

Изобретение относится к геофизическому приборостроению и может быть использовано при морских сейсмических исследованиях с помощью буксируемых приемных устройств-. Цель изобретения - улучшение качества сейсмометрических данных путем минимизации уровня буксировочных шумов при буксировке группы из М пьезокос. Система содержит в бортовой части блок предсказания буксировочного шумообра- зования, блок вычисления плавучести, сумматор, логический блок, программатор режима и регулятор угловой скорости поворота судна. Режим управления по курсу судна и скорости выбираются с учетом минимизации уровня буксировочных шумов. 2 ИЛ. с б (Л
RK. Vxt, +Yl, +
1 Vex,,-x.,,,r-b (У..- YK,)- (z
t
ki
V
c
где Х-щ ,Y к,- ,Z , ,X ,.,,Ym-i s j., - трехмерные координаты i и (i-1) секций К сейсмокосы; 1 - расстояние между соседними секциями;
V - скорость распространения сейсмической волны.
t- Kt
У.
- ZM-,)
Кроме того, для центральной косы вычисляются угол наклона и угол . отклонения о( Г(Фиг.2):
Л; arcs.in
2, - Z,-.,
Y ; - Y i-t
e(. arctg - - х-Г
л i - л ;.,
D , (Х,„- Х,„) +, (Y,,- Ч,„Г а,„- Z,,) ; . D,, (Хз„- Х,„) + (Y,,- Y,,y + ( Z,,rВычисленные координаты с(- , /ь, секг
ций центральной косы с выхода 42 вычислителя геометрии поступают в вычислитель плав гчести косы, в котором по известшлм уравнениям стационарной конфигуращш взвешенной в жид- кости нити вычисляется плавучесть ь) косы и эти же данные поступают в блок предсказания шумообразования, опре- деляющий факторы шума, обусловленные
негоризонтальнолтью сейсмокосы щ и отклонением косы от линии движения судна .
ш
, .. ,
1
п
Фщ Ii XT sin off 1 1
где Ij, I,j - весовые коэффициенты,
зависящие от скорости п движения судна и конструкции косы.
Информация
д у.
ср. к
с выхода 43 вычислителя геометрии подается в сумматор, который вычисляет суммарное отклонение буксируемой части от ли- НИИ профиля с учетом сноса судна-буксира YC
aY. ДУ, - Y,p.,.
Логический блок сравнивает вычис- ленные факторы шума Ф й на сигнальных входах 44 - 46 с предельно допустимыми величинами, задаваемыми с помощью программатора режима по установочным входам 47 - 49, и выдает управляющие сигналы
С1, еслиФ - Фш Аол
С2, аслиф - ФШАОГ /О
СЗ, еслиФ (
л.
X. Лоп- О на выхода 51-52 блока 2,
Управляющие сигналы С1 - СЗ поступают в KOppeKTOjfti скорости и курса судна. Вычислительное устройство корректора скорости по управляющему сигналу С1 по данным о скорости судна и с учетом плавучести ш определяет оптимальнзлю скорость движения судна
расстояние между концами соседних сейсмокос
решением уравнений стационарной конфигурации кабеля, при которой суммарное шумообразованке, обусловленное негоризонтальностью расположения сейсмического кабеля и скоростью движения
где
+ Ф; min,
ф .- В v
5
0
5
п
.- г
0
5
Код коррекции скорости -V подается через распределитель команд, осуществляющий поочередное прохождение управляющих сигналов в блок уп- - равления, скоростью движения судна V и в блок 31 управления источником через соответствующие блоки интерфейса для нреобразования дифровой информации в аналоговую.
Следящий привод блока 29 управления скоростью хода обеспечивает изменение скорости движения судна изменением шага винта или частоты вращения главного двигателя
После коррекции скорости судна по сигналу С2 вычислительное устройство корректора курса с учетом скорости движения судна и плавучести косы для различных значений корректор курса ЛК путем решения систем уравнений пространственной конфигурации для центральной косы с различными начальными условиями в точке крепления ее к судну
с(/ /}К; о
где /Ьд- угол наклона косы в вертикальной плоскости, выбирает оптимальную корректуру курса, при котором буксируемая часть наименьшим образом отклоняется от линии движения судна, т.е. когда ф min Судно на данном участке переходит на нозьт близкий профш гь ввиду невозможности получения качественных результатов на заданном профиле,
В накопителе сейсмических данных регистрируется новый скорректирован- ньш курс.
в случае значительной величины параллельного сноса буксируемой части по сигналу СЗ корректора курса дК
выдается в распределите ть команд в виде ЛК Сф.лУ J где С ф - угловой коэффициент, определяющий угол выхода судна на линию профиля, и судно затем возвращается на заданный профиль,
, При этом для повышения плавности движения судна-буксира при совершении маневра и исключения повреждени буксируемых кабелей скорость поворота адаптирована к скорости движения судна и величине расхождений сейсмокос,
Здесь управляющий код коррекции курса подается на. авторулевой через регулятор угловой скорости поворота судна, представляющий собой цифровой интегратор, обеспечивающий линейное нарастание управляющего кода до своего установившегося значения со скоростью
1
LO
К .„- К
в
D
где К, К jj - коэффициенты пропорциональности, устанавливаемые эмпирическим путем; V , D скорость судна и величина расхождения соседних пьезокос, поступающие, на входы 53 и 54 регулятора угловой скорости с блока интерфейса скорости и с выхода вычислителя геометрии соответственно а
Восстановление данных о профиле и пути судна со взаимной привязкой сейсмометрических данных производится при последующем вьюоде масс1тов с накопителя и интерпретационном мон- таже сейсморазреза.
Полезный зф(Ьект в системе достигается за счет того, что управление режимом движения судном и процессом сейсмометрических исследований ведется на основе анализа данньтх о прогнозируемом буксировочном шумообра- зованиИэ связанном с геометрией буксируемо и сие темы.
При большом уровне буксировочных шумов, обусловленных негоризонтальностью системы сейсмокос -ф , вы- чис.1штельное устройство корректора скорости определяет оптимальную кор ректуру скорости AV, при которой искривление буксируемой системы в вертикальной плоскости ми шмально.
При значительном искривлении буксируемой системы кос в горизонтальной плоскости и возрастании связанного с этим буксировочного шумообра- зования ф вычислительное устройство корректора курса определяет оптимальную корректуру курса зКдля перехода на новый курс, где усло вия
обтекания кабеля максимально приближены к соосному. Кроме того, судно-буксир совершает маневры для перехода на новый курс как с целью снижения буксировочных шумов, так
г и с целью возврата на линию профиля с угловой скоростью поворота, адаптированной к скорости движения судна и величине расхождения соседних сейсмометрических кос, что дополнитель-
0 но снижает уровень буксировочных шумов .
Таким образом, в системе обеспечивается минимальный уровень буксировочных шумов и достигается повышение
5 качества сейсмических данных, т.е. повьш1ение соотношения сигнал/шум.
Формула изобретения Система для управления морскими
0 сейсмическими исследованиями, содержащая в буксируемой части источник сейсмосигналов, по меньшей мере одну пьезосейсмометрическую косу или эквивалентную ей по числу каналов группу пьезосейсмометрических кос, оснащенньк датчиками глубины погру- . жения и датчиками волны первого
вступления, а в бортовой части - накопитель измерительных данных, груп0 ПУ детекторов времени первого вступления и вычислитель геометрии буксируемой части системы, подключенный своими входами к выходам соответ ст- вующих детекторов и датчиков глубины,
5 а первым, вторым и третьим выходами электрически связанный с корректором курса судна, корректором скорости его хода и с первым входом накопителя, причем выходы корректоров подключены к первому и второму входам
5
0
5
распределителя команд, первый и второй выходы которого соединены через первый и второй блоки интерфейса с входами блока управления скоростью. хода судна и входом блока возбуждения, сейсмоисточника,а третий выход распределителя команд электрически связан через третий блок интерфейса с входом авторулевой машины,.а также датчик
:У
| Патент США | |||
| 4481611, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| Патент США № 3525070, КЛ | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
