Ю О1
Изобретение относится к электро- технике, а именно к электродвигате- лям с дискретным перемещением, и может быть использовано в электромеханических системах с вращательным и :поступательным движением,
; Целью изобретения является расширение функциональных возможностей путем обеспечения поступательного перемен1;ения.
На фиг о 1 показан шаговый электродвигатель, продольный разрез; на фиг. 2 - электродвигатель с четырехI фазной обмоткой, поперечное сечение;
на фиг о 3 - то же, с двухфазной об1 моткой о
; Шаговьй электродвигатель содержит корпус 1, внутри которого размещены ярмо 2 статора, два пакета 3 стато: ра, обмотки 4 управленияэ постоянный магнит 55 немагнитную втулку 65 два
25
35
40
агнитопровода 7 ротора с зубцами 8, ьЕ одной вал-9,, немагнитную втулку 10, щлиндрический магнитопровод 11,
Пакеты 3 статора, смещенные в аксиальном направле1даи5 имеют зубцы, смещенные относительно друг друга на четверть зубцового деленйЯз ш опиаются на ярмо 2 статорао Кольцевой 30 остоянньй магнит 5 имеет форку полого цилиндра, намагничен аксиально и естко закреплен на статоре с помощью немагнитной втулки 6. Цнлинд- ршшскт магнитопровод 11 размещен с зазором между мап-штопроводами 7 ротора и выходны г валом 9. На внешней поверхностк цилиндрического маг- ннтопровода 11 и на внутренней поверхности магнитопроводов ротора выполнена винтовая резьба с одинаковым шагом и ходомс Немагнитная втулка 10 объединяет магнитопроводы 7 ротора Б жесткий ротор. Цилиндрический маг- нктопровод 11 имеет возможность поступательного перемещения с помощью направляющих.
Основная часть магнитного потока постоянного магнита 5 замыкается по пути; постоянный магнит 5 магнитопровод 7 ротора - зазор между резьбами - цилиндрический магии- топровод 11 - и далее по аналогичному пути до постоянного магнита 5 Часть его потока проходит по пути; постоянньй магнит 5 - магнитопро- вод 7 ротора зазор между его зуб- цаг-ш пакета 3 и зубцами пакета 3 статора - ярмо 2 статора - и далее
20
д5
50
55
25
35
40
30
по -аналогичному пути до постоянного магнита 5.,
На фиг, 2 корпус 1 и ярмо 2 не показаны. Пакет 3 статора имеет зубчатые выступы 12, на которых размещены фазы А, В, С, D обмотки 4, причем зубцы соответствующих выступов смещены на.четверть зубцового шага
10 яруг относительно друга. При подаче импульса на фазу А увеличивается магнитньй поток соответствующих выступов и уменьшается поток остальных выступов, на которых размещены фа15. зы В, С, DO В результате ротор занимает положение, при котором зубцы ротора противолежат зубцам выст 5; 1ов с фазой А,
При подаче импульса на фазу В
20 увеличивается поток выступов, на которых она размещена, и ослабляется ПОТОК остальных выступов Ротор поворачивается на угол, соответствующий четверти зубцового деления. При этом его зубцы устанавливаются против зубцов выступа с фазой В, Затем подается импульс на фазу Си т,д.
Таким образом, при подаче управ- дякщих импульсов в порядке A-B-C-D- A-B-C-L А происходит вращение ротора в положительном направлении, т,ео против часовой стрелки Для вращения ротора в обратном направлении следует подавать импульсы в порядке A-D-C-B-A-D-C-B-A,
Для фиксации ротора в некотором положении необходимо длительно пропускать ток По соответствующей фазе.
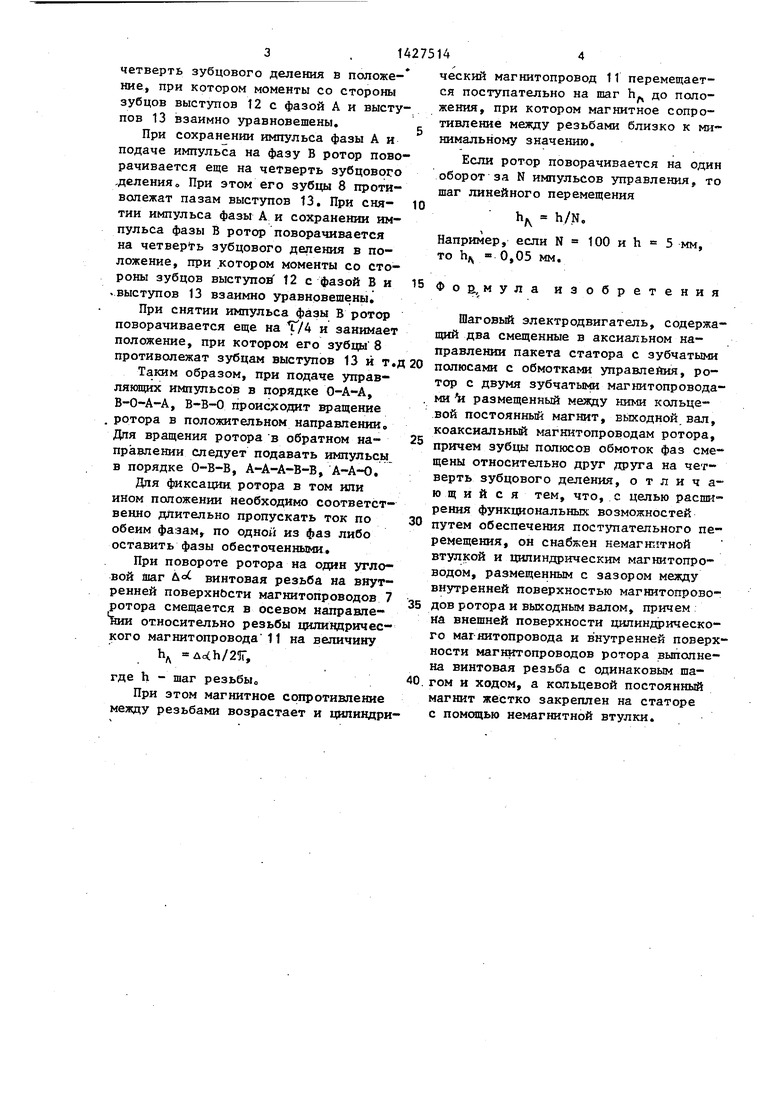
На фиг, 3 корпус 1 и ярмо 2 не показаны. Пакет 3 статора имеет зубчатые выступы 12, на которых размещены фазы А,В обмотки 4 и зубчатые выступы 13 без обмоток Между зубцами соседних выступов с фазами А и В
5 имеется сдвиг на величину f (на фиг,3 f T/4, t - зубцовое деление) Между зубцами выступов 13 и зубцами выступов 12 имеется сдвиг на (Т-)/2 (на фиг, 3 - на ЗТ /8), Зубцы сосед- них выступов 12с фазой А сдвинуты друг относительно друга на Т/2, то же имеет место для зубцов соседних выступов 12с фазой В, Зубцы всех выступов 13 выполнены без сдвига относительно друг друга. При обесточенных фазах ротор занимает положение, при котором его зубцы 8 протт волежат зубцам выступов 13, При подаче импульса на фазу А ротор поворачивается на
0
5
четверть зубцового деления в положение, при котором моменты со стороны зубцов выступов 12 с фазой А и выступов 13 взаимно уравновешены.
При сохранении импульса фазы А и подаче импульса на фазу В ротор поворачивается еще на четверть зубцового деленияо При этом его зубцы 8 противолежат пазам выступов 13, При сня- ю тии импульса фазы А и сохранении импульса фазы В ротор поворачивается на четверть зубцового деления в положение, при котором моменты со стороны зубцов выступов 12 с фазой В и 15 выступов 13 взаимно уравновешены.
При снятии импульса фазы В ротор поворачивается еще на /4 и занимает положение, при котором его зубцы 8 противолежат зубцам выступов 13 и т,д 20
Таким образом, при подаче управляющих импульсов в порядке 0-А-А, В-О-А-А, В-В-0 происходит вращение ротора в положительном направлении« Для вращения ротора в обратном на- 25 правлении следует подавать импульсы в порядке 0-В-В, А-А-А-В-В, А-А-0,
Для фиксации ротора в том иди ином положении необходимо соответственно длительно пропускать ток по 30 обеим фазам, по одной из фаз либо оставить фазы обесточенными.
При повороте ротора на один угловой шаг Л винтовая резьба на внутренней поверхнЬсти магнитопроводов 7 -д ротора смещается в осевом направлении относительно резьбы цилиндрического магнитопровода 11 на величину
h Дс(Ь/21Г,
где h - шаг резьбы
При зтом магнитное сопротивление между резьбами возрастает и цилиндрический магнитопровод 11 перемещается поступательно на шаг h до положения, при котором магнитное сопротивление между резьбами близко к ми ннмальному значению.
Если ротор поворачивается на один оборот за N импульсов управления, то шаг линейного перемещения
h h/N.
Например, если М 100иН 5 мм, то Ц 0,05 мм.
Фов, мула изобретения
Шаговьй электродвигатель, содержащий два смещенные в аксиальном направлении пакета статора с зубчатыми полюсами с обмотками управлейия, ротор с зубчатыми магнитопровода- ми к размещенный между ними кольцевой постоянный магнит, вьнодной вал, коаксиальный магнитопроводам ротора, причем зубцы полюсов обмоток фаз смещены относительно друг друга на четверть зубцового деления, отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения поступательного перемещения, он снабжен немагш5тной втулкой и цилиндрическим магнитопро- водом, размещенным с зазором между внутренней поверхностью магнитопроводов ротора и выходным валом, причем на внешней поверхности цилиндаическо- го магнитопровода и внутренней поверхности магнитопроводов ротора выполнена винтовая резьба с одинаковым шагом и ходом, а кольцевой постоянный магнит жестко закреплен на статоре с помощью немагнитной втулки.
Ц :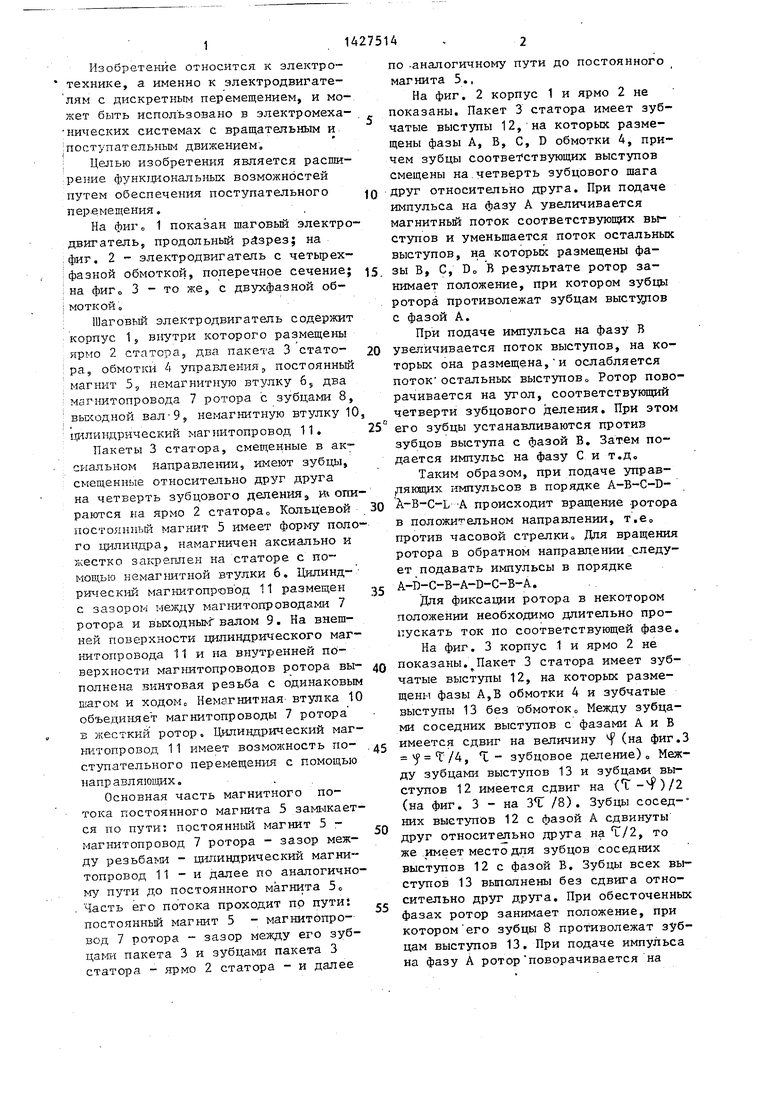
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электродвигатель | 1986 |
|
SU1495948A1 |
| Шаговый электродвигатель | 1987 |
|
SU1647793A1 |
| Асинхронный редукторный электродвигатель | 1986 |
|
SU1753548A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321144C1 |
| Шаговый электродвигатель | 1985 |
|
SU1399862A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2015 |
|
RU2596145C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437200C1 |
| Шаговый электродвигатель | 1987 |
|
SU1826109A1 |
Изобретение относится к электротехнике, к электродвигателям с дискретным перемещением, и может быть использовано в электромеханических системах с вращательным и поступательным движением. Цель состоит в расширении функциональных возможностей путем обеспечения поступательного перемещения. Устройство содержит корпус 1, внутри которого разме щены два пакета 3 статора с обмотками 4 управления и ротор с двумя каг- нитопроводами 7. Кольцевой постоянный магнит 5 вьиолнен в виде полого циливдра, намагниченного аксиально и жестко закр апленного на статоре немагнитной втулкой 6. Цилиндрический магнитопровод 11 размещен с зазором между магнитопроводамй 7 ротора и выходным валом 9 и имеет на внешней поверхности винтовую резьбу, шаг торой равен шагу резьбы, выполненной ка внутренней поверхности магнитопро- водов 7 ротора. При подаче управляющих импульсов на обмотку 4 статора происходит вращение ротора и одновре - менное перемещение цилиндрического .магнитопровода. 3 ило С (
f/
tt
| Линейный шаговый электродвигатель | 1979 |
|
SU807458A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Реверсивный шаговый электродвигатель | 1977 |
|
SU746829A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
