1
Изобретение относится к технике бурения, в частности к устройствам для контроля усилий в различных точках колонны.
Известен забойный регистратор осевой нагрузки на долото, предназначенный для контроля усилий в трубах, содержащий корпус регистратора, установленный в бурильной трубе на базовых опорах. Труба является упругим ю элементом регистратора. Нижняя опора приварена, а верхняя съемная опора зафиксирована тремя коническими штифтами. При создании осевой нагрузки на долото колонной бурильных труб усилие 15 сжатия передается с бурильной трубы на три конических штифта верхней опоры, далее на шток, который давит на рычаги и перемещает перо на величину, пропорциональную осевой нагрузке f1J.
Наиболее близко к изобретению устройство, содержащее упругий элемент в качестве которого используется участок бурильной трубы, цилиндрическую втулку, закрепленную внутри упругого элемента с помощью фик.сирующих элементов. Устройство имеет полость для контейнеров с электронной аппаратурой и лубрикатор. При деформации упругого элемента, т.е. участка трубы, создается его смещение, которое передается на цилиндрическую втулку и деформирует ее. Эта деформация измеряется преобразователями перемещения 2.
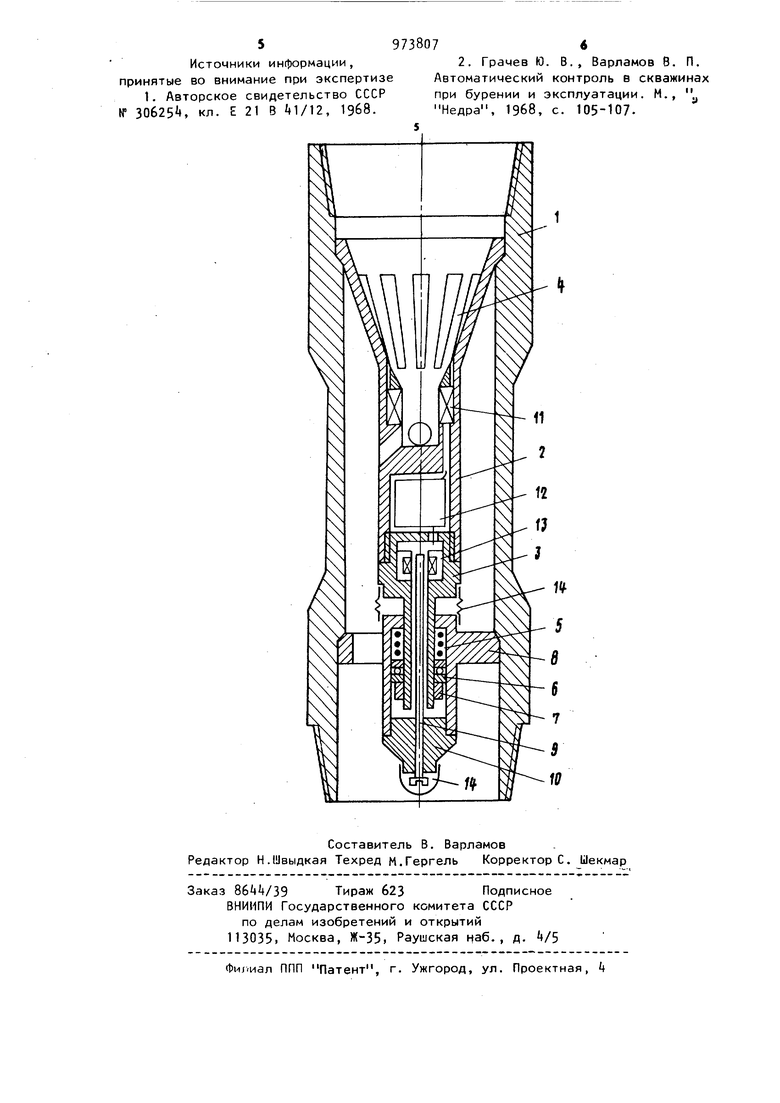
Недостатком перечисленных устройств является погрешность,связанная с наличием люфтов в местах крепления съемной опоры или цилиндрической втулки к упругому элементу с помощью фиксирующих элементов. При вибрациях и ударных нагрузках общая масса глубинного устройства создает люфты, величина которых соизмерима с величиной деформации упругого элемента или участка трубы. 397 Фиксирующие штифты под воздействием ударов и вибраций перемещаются, нарушая жесткость фиксации и создавая люфт, ведущий к неоднозначности положения преобразователя перемещени и тем самым ухудшая точность измерения усилий, причем величина люфта соизмерима с рабочим перемещением втулки. Кроме этого, отсутствует возможность регулировки начального зазора И установки нуля в индуктивном преобразователе после монтажа всего уст ройства, Цель изобретения - пЬвышение точности измерения путем устранения люфтов. Поставленная цель достигается тем что корпус снабжен трубчатым хвостовиком, пружиной, подшипником и гай кой, причем корпус соединен с нижней базовой опорой через сжатую пружину, упорный подшипник и гайку, при этом статор индуктивного Преобразователя размещен в трубчатом хвосто вике, а якорь преобразователя укреплен в нижней базовой опоре. На чертеже изображено устройство для измерения усилий в колонне труб. Устройство включает упругий элемент 1, корпус 2 с трубчатым хвостовиком 3 и конусной перфорированной корзиной k. Хвостовик 3 через пружину 5. упорный подшипник 6 и гайку 7 соединен с нижней опорой 8. Яко 9 индуктивного преобразователя перемещения размещен в трубчатом хвостовике и для обеспечения возможности регулирования и установки нуля ин дуктивного преобразователя перемещения закреплен в крышке 10 нижней опоры 8 с помощью резьбового соединения. Крышка 10 закреплена в нижней опо ре 8. В корпусе установлены также муфта индуктивного соединителя 11 с электронной сборкой 12. Статор индук тивного преобразователя перемещения 13 размещен в трубчатом хвостовике. Устройство имеет лубрикаторы И. 8 упругом элементе 1 с помощью га ки 7, сжатой пружины 3 и упорного подшипника 6 корпус 2 с трубчатым хвостовиком 3 и перфорированной корЗИНОЙ k растянут между верхней и нижней базовыми опорами для выборки люфтов, причем сила натяжения пру 4 жины выбирается, исходя из условия , где F - сила натяжения пружины;m - масса измерительного узла; а - максимальное ускорение вибрации. Устройство работает следующим образом. Под действием осевого усилия создается деформация упругого элемента 1, которая передается через корзину Ц, корпус 2 и трубчатый хвостовик 3 на статор 13 и якорь 9 индуктивного преобразователя. Якорь 9, связанный с нижней опорой упругого элемента, перемещается относительно статора 13 индуктивного преобразователя перемещения , закрепленного неподвижно по отношению к верхней опоре упругого элемента. Индуктивный датчик включен в контур генератора расположенного в контейнере с электронной сборкой 12. Полученный сигнал через муфту индуктивного соединителя 11 поступает в линию связи. Таким образом, данное устройство повышает точность измерения осевого усилия, так как данная конструкция позволяет ликвидировать люфт измерительно узла. Вибрации с ускорением менее 10 g не сказываются на точности измерений, поскольку выполняется условие Fi ma. Кроме этого, устройство позволяет производить установку и регулировку положения якоря индуктивного датчика перемещения после монтажа корпуса в упругом элементе. Формула изобретения Устройство для измерения усилий в колонне труб, содержащее упругий элемент с верхней и нижней базовыми опорами, между которыми укреплен корпус с индуктивным преобразователем перемещения и электронной аппаратурой,отличающееся тем, что, с целью повышения точности измерения путем устранения люфтов, корпус снабжен трубчатым хвостовиком, пружиной, упорным подшипником и гайкой, причем корпус соединен с нижней базовой опорой через пружину, упорный подшипник и гайку, при этом статор индуктивного преобразователя размещен в трубчатом хвостовике, а якорь преобразователя укреплен в нижней базовой опоре.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения радиальных усилий в колонне бурильных труб | 1982 |
|
SU1025876A1 |
| ОСЦИЛЛЯТОР БУРИЛЬНОЙ КОЛОННЫ | 2023 |
|
RU2820910C1 |
| ОСЦИЛЛЯТОР ДЛЯ БУРИЛЬНОЙ КОЛОННЫ | 2016 |
|
RU2645198C1 |
| ОСЦИЛЛЯТОР ДЛЯ БУРИЛЬНОЙ КОЛОННЫ | 2019 |
|
RU2732322C1 |
| ОСЦИЛЛЯТОР БУРИЛЬНОЙ КОЛОННЫ | 2021 |
|
RU2768784C1 |
| ГИДРАВЛИЧЕСКИЙ ЗАБОЙНЫЙ ДВИГАТЕЛЬ | 2014 |
|
RU2586124C2 |
| ОСЦИЛЛЯТОР БУРИЛЬНОЙ КОЛОННЫ | 2020 |
|
RU2750144C1 |
| ШПИНДЕЛЬНАЯ МАСЛОНАПОЛНЕННАЯ СЕКЦИЯ ГИДРАВЛИЧЕСКОГО ЗАБОЙНОГО ДВИГАТЕЛЯ | 2010 |
|
RU2457308C2 |
| Датчик давления | 1979 |
|
SU815268A1 |
| КЕРНООТБОРНЫЙ СНАРЯД | 2012 |
|
RU2509867C1 |
