(54) ДАТЧИК ДАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик давления | 1978 |
|
SU885845A1 |
| Устройство для контроля качества сварного шва при роликовой сварке | 1959 |
|
SU130233A1 |
| Датчик давления | 1990 |
|
SU1778565A1 |
| Устройство для измерения усилий в колонне труб | 1980 |
|
SU973807A1 |
| Электромагнитный уровнемер | 1990 |
|
SU1793248A1 |
| Устройство управления давлением сжатого воздуха с приводом от линейного актуатора | 2021 |
|
RU2767568C1 |
| Гидростатический плотномер | 1979 |
|
SU823975A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2004 |
|
RU2266517C1 |
| Регулирующий клапан для криогенных сред | 1982 |
|
SU1071858A1 |
| Регулятор давления | 1976 |
|
SU593194A1 |
1
Изобретение относится к средствам для намерения давлений в нефтяной и газовых скважинах.
Известен датчик давления, чувствительный элемент которого выпалнен в виде снльфона с индуктивным датчиком перемещения flj. ,
Известен такжц датчик д авления, содержоиций размещенные в корпусе сильфоны и связанный с ними индуктивный преобразователь перемещения в эИектрический сигнал.
енльфоны сообщаются между собой передаточной ферромагнитной жидкость Рабочий сильфон выполнен из нагни тсА«ягкого материала и расположен электромагнитной катушки преобразователя перемещения рабочего снльфона в электрический сигнал 12).
Недостатками датчика является его низкая чувствительность и значительная температурная погрешность
Цель изобретения - повышение чув-t ствительности компенсгидии температурной погрешности.
Поставленная цель достигается там, что электромагнитная катушка индуктивного преобразователя перемещения в электрический сигнгш закреплена на свободном нижнем конце одного из сильфонов, а якорь преобразователя жестко связан со свободным нижннм концом другого снльфона. При .этом корпус датчика и якорь выполнены из материалов, отноиенне коэффициентов линейного расширения которых равно обратному отношению их длин.
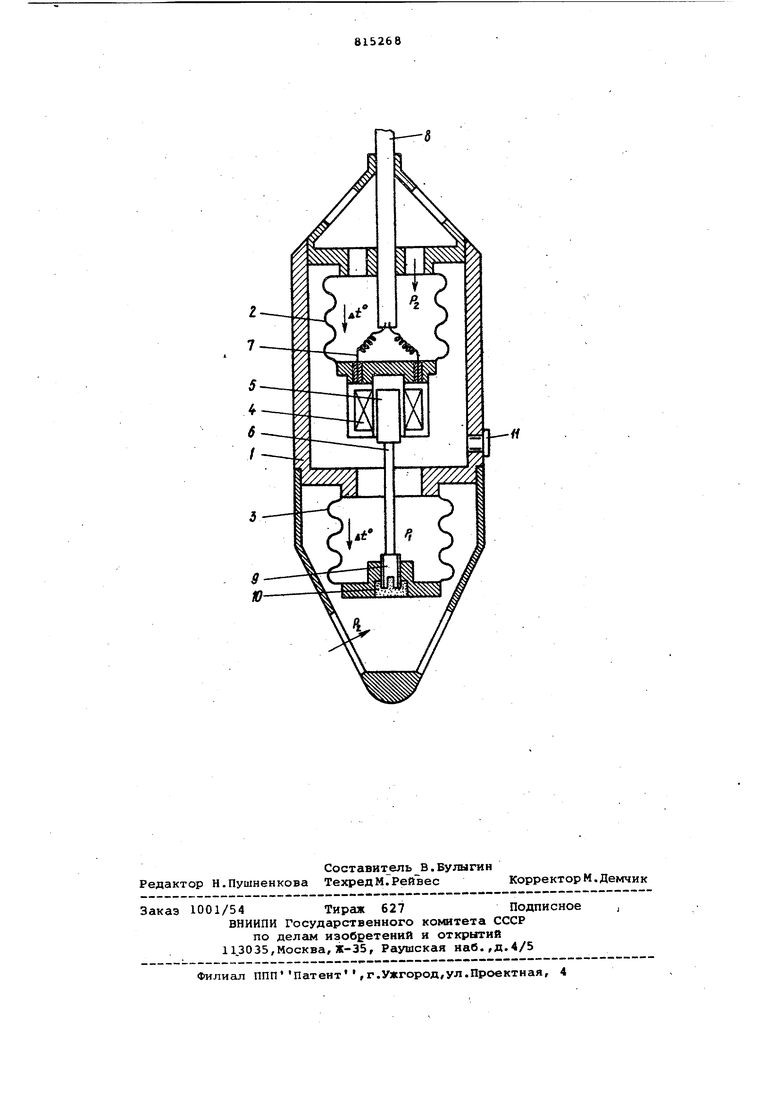
На чертеже представлен предлага0емый датчик давления,продольное сечение.
Датчик содержит коргГус 1, на котором верхними концами закреплены два одинаковых снльфона 2 и 3. На нижнем
5 конце верхнего сильфона закреплена электромагнитная катушка 4 индуктивного преобразователя. Якорь 5 npfeo6разователя с помощью штока 6 закреплен на нижнем свободном конце нижне0го сильфона. Через герметичные вводы 7 к электромагнитной катушке присоединены жилы кабеля 8. С помощью резьбового соединения 9, уп5лотненного компаундом 10, регулируется положение якоря по отнсяденню к электромагнитной катушке. В корпусе имеется также резьбовая пробка 11.
Датчик давления работает следуюOщим образом. В исходном состоянии пробка 11 ввернута в корпус 1 и уплотнена. Давление воздуха Р- внутри корпуса равно атмосферному. При опускании датчика на кабеле в скважину давлен Р снаружи датчика увеличивается и воспринимается сильфонами 2 и 3, причем сильфов.2 растягивается, а сильфон 3 сжимается, что приводит к перемещению навстречу друг другу катушки 4 и якоря 5. Пропорционально этому перемещению в катушке 4 изменяется- электрический СИГНсШ. Датчик давления может .бытьисполь зован и для измерения разности давле ний внутри трубной колонны и за ней Для этого датчик должен быть стационарно установлен внутри специального переводника, смонтированного в колонне на необходимой глубине. При этом открывается резьбовая пробка 11, внутренняя полость датчика запол няется диэлектрической жидкостью и трубкой соединяется через отверстие в специальном переводнике с затрубным пространством. При давлении Р в затрубном пространстве внутри датчика давление также Р-,, внутритрубное давление Р действует снаружи датчика. Сильфоны датчика воспринимают результирующее давление которое с помощью индуктивного преобразователя преобразуется в электрический сигнал. Компенсация температурной погреш ности в предлагаемом датчике осуществляется следующим образом. При возрастании температуры увели чивается длина сильфонов, корпуса и штока. Для одинаковых сильфонов величины их температурной деформации равны между собой, и поэтому не вызывают изменения положения якоря относительно катушки. Следовательно погрешность вызывается только разностью изменений корпуса и штока под действием температуры. При посто янной температуре имеем к. U ( л где Рц - длина корпуса, РШ - длина штока, Sfl- длина сердечника якоря. Перемещение якоря от температуры Е,(1 ы ш-ьье.ис1д- г), гдесСь па температурные коэффициенты линейного расширения корпуса и штока соответственно. Условие компенсации температурной пограяиости 3,jEi ,. Следовательно, компенсация температурной погрешности достигается путем выбора длии корпуса и штока таким образом, что их отношение обратно пропорциоиально отнсмдению соответствующих температурных коэффициентов линейного расширения. Чувствительность датчика давления возрастает за счет того, что при измерении 9ДИН из сильфонов датчика работает на растяжение, а другой на сжатие, что обеспечивает перемещение электромагнитной катушки и якоря индуктивного преобразователя навстречу друг другу. Формула изобретения 1.Датчик давления, содержащий размещенные в корпусе сильфоны и связанный с ними индуктивный преобразователь перемещения в электрический сигнал, отличающийся тем, что, с целью повышения чувствительности, электромагнитная катушка преобразователя закреплена на свободном нижнем конце одного из сильфонов, якорь преобразователя жестко связан со свободным нижним концом другого сильфона. 2.Датчик ПОП.1, отличающийся тем, что корпус и якорь выполнены из материалов, отношейие коэффициентов линейного расширения которых обратно пропорционально отношению их длин. Источники информации, . принятые во внимание при экспертизе 1.Авторское свидетельство СССР 526797, кл. G 01 L 9/10, 1975. 2.Авторское свидетельство СССР 580310, кл. Е 21 В 47/06, 1976.
