Изобретение относится к приборо- строению, а именно к механизмам для преобразования вращательного движения в томное поступательное перемещение.
Известен механизм для точных поступательных перемещений, содержащий размещенные в корпусе дифсЬеренциальний винт и охватывающие его расположенные коаксиально и подпружиненные три резьбовые втулки, внешняя из которы;с зафиксирована от осевых перемещений, а средняя и внутренняя vcTaновлены с возможностью осевых перемещений 1 J.
Недостатком известного механизма является то, что при грубой настройке дифференциального винта невозможно получить только поступательное перемещение, что ограничивает функциональные позиожности механизма при его использовании для точного перемещения объектов, требующих очень точной ориентации в пространстве во всем диа пазоне рабочего хода, например, при .
перемещении обкладок образцовых конденсаторов, сеток, ижал, зеркал, линз и оспетителей при юстировке оптических приборов.
Цель изобретения - повышение точности установки винта.
Указанная цель достигается тем, что механизм для точных поступательных перемещений, содержащий размещенные в. корпусе дифференциальный винт и охватывающие его расположенные коаксиально подпруминенные в осевом направлении три резьбовые втулки, внешняя из которых зафиксирована от осевых перемещений, а средняя и внутренняя установлены с возможностью осе вых перемещений, снабжен 1УТИ(том, жестко связанным с дифференциальным винтом, в корпусе и средней втулке выполнены пазы, в которых расположен штифт, а внутре.нняя и внешняя втулки установлены с возможностью вращения .
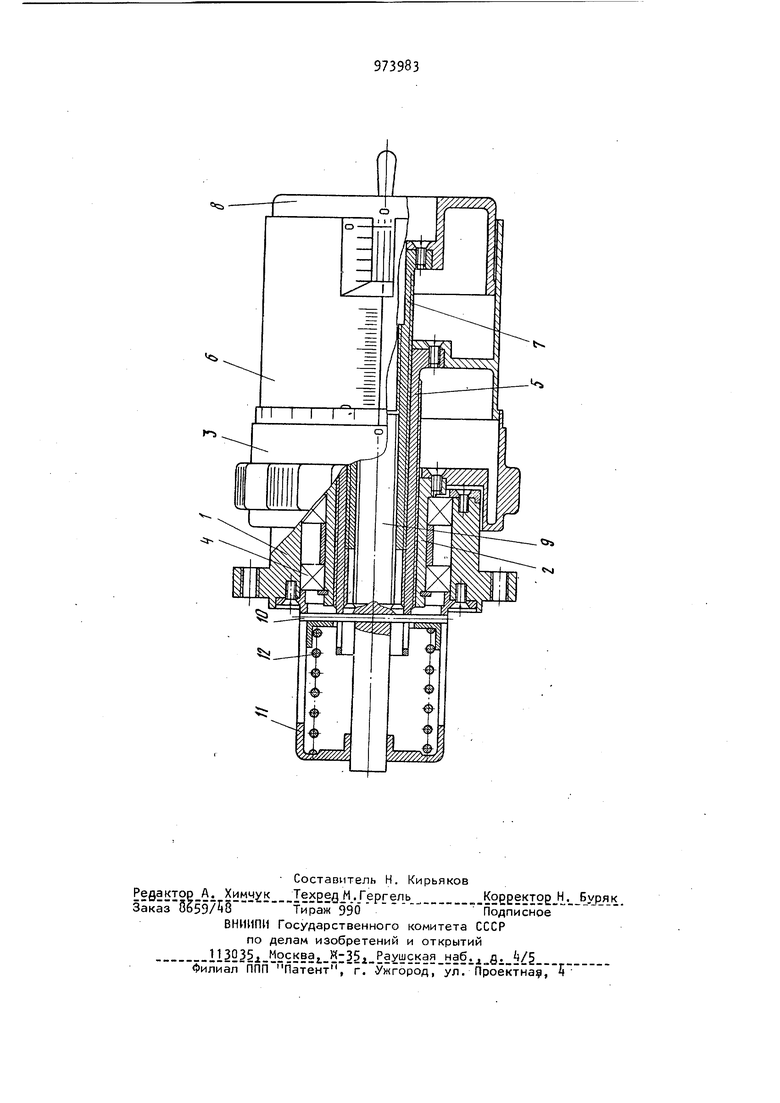
Hn чертеже схематически изображен; механизм для точных поступательных перемещений.
Механизм содержит корпус 1, внешнюю резьбовую втулку 2 с ручным приводом и циферблатом 3, подшипники k, среднюю резьбовую отулку 5 с циферблатом 6, образующую с внешней резьбовой втулкой 2 первую винтовую пару внутреннюю резьбовую втулку 7 с ручным приводом и циферблатом 8, образующую совместно со средней резьбовой втулкой 5 вторую винтовую пару, дифференциальный винт 9 образующий совместно с внутренней резьбовой втулкой 7 третью винтовую пару, штифт 10,жестко связанный с диффepeн циальнымвинтом 9, крышку 11, жестко связанную с корпусом 1 и пружину 12.
Механизм для точных поступательных перемещений работает следующим образом.
При вращении внешней резьбовой втулки 2, установленной в корпусе 1 на подшипниках , средняя втулка 5, связанная с корпусом через штифт 10 совместно с втулкой 7 и винтом 9 перемещается поступательно в осевом направлении, т.е. осуществляется грубое перемещение второй и третьей винтовых пар на величину
Yd
X.
- зГо V
где Х - абсолютное поступательное перемещение второй и третьей винтовых пар в осевом направ лении;
У - угол поворота резьбовой втулки 2 относительно корпуса;
t - шаг резьбовых втулок первой винтовой пары.
Определение перемещения конца винта 9 при грубой настройке производится по шкалам циферблатов 6 и 3, расположенных относительно друг друга коаксиально и связанных соответственно с резьбовыми втулками 5 и 2 .
При вращении внутренней резьбовой втулки 7, являющейся одновременно подвижным звеном второй и третьей винтовых пар, винт 9, связанный с корпусом через штифт 10 перемещается поступательно в осевом направлении на величину пропорциональную разности шагов второй и третьей винтовых пар.
т.е. осуществляется точное перемещение на величину
(Ч- tj,
i-J
где X - абсолютное поступательное перемещение винта; У - угол поворота внутренней
резьбовой втулки относительно корпуса; t - шаг резьбовых втулок второй
винтовой пары; t - шаг резьбовой втулки и винта
третьей винтовой пары. При значениях шагов t мало отличающихся друг от друга можно получить большое придаточное отношение, что гюзволяет винту 9 осуществлять точное поступательное микроперемещение.
Люфты и осевые зазоры у винтовых пар механизма выбираются при помощи пружины 12, подпружинивающей через штифт 10 подвижнь1е звенья винтовых пар к крышке П, жестко связанной с корпусом 1.
Таким образом, грубое и точное перемещение аинта 9 предлагаемого механизма осуществля ется только поступатeльt o, что очень важно при применении механизма для точного перемещения объектов, требующих строгой ориентации 3 пространстве на всем диапазоне перемещений ( грубых и точных).
Формула изобретения
Механизм для точных поступательных перемещений, содержащий размещенные в корпусе дифференциальный винт и охвтывающие его расположенные коаксиальМо подпружиненные в осевом направлении три резьбовые втулки, внешняя из которых зафиксирована от осевых перемещений, а средняя и внутренняя установлены с возможностью осевых перемещений, отличающийся тем, что, с целью повышения точности установки винта, механизм снабжен-штифтом, жестко связанным с дифференциальным винтом, в корпусе и средней втулке выполнены продольные пазы, в которых расположен штифт, а внутренняя и внешняя втулки установлены с возможностью вращения.
Источники информации, принятые во внимание при экспертизе
1. Артоболевский И.И. Механизмы в современной технике, Н., Наука, 1971, т. II, с. 970, Фиг. 2253(1).
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОВАЯ ПАРА ДЛЯ ЭКСЦЕНТРИКОВОЙ ПЕРЕДАЧИ ВИНТ-ГАЙКА | 2018 |
|
RU2695742C1 |
| ДОМКРАТ ВИНТОВОЙ ТЕЛЕСКОПИЧЕСКИЙ | 2016 |
|
RU2652364C1 |
| МАНОМЕТР С УЗЛОМ СИГНАЛИЗАЦИИ | 2006 |
|
RU2344392C2 |
| ГРЕБНОЙ ВИНТ РЕГУЛИРУЕМОГО ШАГА | 2002 |
|
RU2236986C2 |
| Способ расчёта параметров работы в средствах индивидуальной защиты органов дыхания и устройство для его реализации (варианты) | 2017 |
|
RU2674278C1 |
| Координатный механизм | 1988 |
|
SU1737390A1 |
| ГИДРОДОМКРАТ С ФУНКЦИЕЙ ВИНТОВОЙ ОПОРЫ | 2014 |
|
RU2562677C1 |
| Устройство для юстировки оптических элементов | 1989 |
|
SU1674041A1 |
| МЕХАНИЗМ ВВОДА УГЛОВ ПРИЦЕЛИВАНИЯ И ВЫВЕРКИ ПРИЦЕЛА | 2001 |
|
RU2201574C1 |
| Дисковые ножницы | 1972 |
|
SU466638A3 |