(54) УСТРОЙСТЮ ДЛЯ СОЗДАНИЯ УДАРНОЙ НАГРУЗКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для создания ударнойНАгРузКи | 1979 |
|
SU832385A1 |
| Устройство для создания ударной нагрузки | 1983 |
|
SU1112248A1 |
| ПОВОРОТНО-УДАРНЫЙ МЕХАНИЗМ Б.Н.СТИХАНОВСКОГО (ВАРИАНТЫ) | 1995 |
|
RU2095234C1 |
| Устройство для создания ударной нагрузки | 1976 |
|
SU636497A1 |
| Устройство для создания в почве поперечных акустических волн | 1982 |
|
SU1144630A3 |
| Механическая кирка для разработки мерзлых и прочных грунтов | 1976 |
|
SU617544A1 |
| Газовый клапан загрузочного устройства доменной печи | 1978 |
|
SU740835A1 |
| УСТРОЙСТВО ДЛЯ СБОРКИ И РАЗБОРКИ КЛИНОВОГО СОЕДИНЕНИЯ ОТСЕКА ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2604553C2 |
| УДАРНО-ВРАЩАТЕЛЬНЫЙ МЕХАНИЗМ | 1992 |
|
RU2062691C1 |
| Полуавтомат для обработки роторов микроэлектродвигателей | 1960 |
|
SU140906A1 |
1
Изобретение относится к удариым механизмам центробежного действия и может быть использовано для испытания изделий и материалов ударными нагрузками, а также в ударных инструментах.
По осиовному авт. св. N 832385 известно устройство для создания ударной нагрузки, содержащее корпус, установленный внутри корпуса ротор с приводом его вращения и рабочий j орган, шарнирно установленный на роторе боек, подпружиненный фиксатор бойка, механизм управления фиксатором, включающий две направляющие и привод юс поворота, механизм переключения фиксатора, включающий установлен- ,j ный на оси кулачок, с одной стороны которого выполнен выступ в виде двухстороннего клина, с другой размещен ролик, установленный с возможностью взаимодействия с направляющими при их повороте, фнксатор бойка вы- 20 полнен в виде пальца с кольцевой проточкой, взаимодействующего с клином кулачка, а боек выполнен с вытупом .входящим в кольцевую проточку кольца 1.
Недостатком устройства является то, что соударение бойка с рабочим органом происходит при произвольном положении бойка относительно ротора, т. е. с различной скоростью, тем самым не обеспечивается оптимальный режим работы устройства.
Цель изобретения - обеспечение оптимальиого режима работы за счет соударения бойка с рабочим органом в момент достижения бойком максимальной скорости.
Поставленная цель достигается тем, нто устрюйство для создания ударной нагрузки снаб- . жено основанием, установленным в корпусе с возможностью поворота вокруг оси вращения ротора, и фиксатором положения основания, при этом направляющие с приводом их поворота размещены на основании.
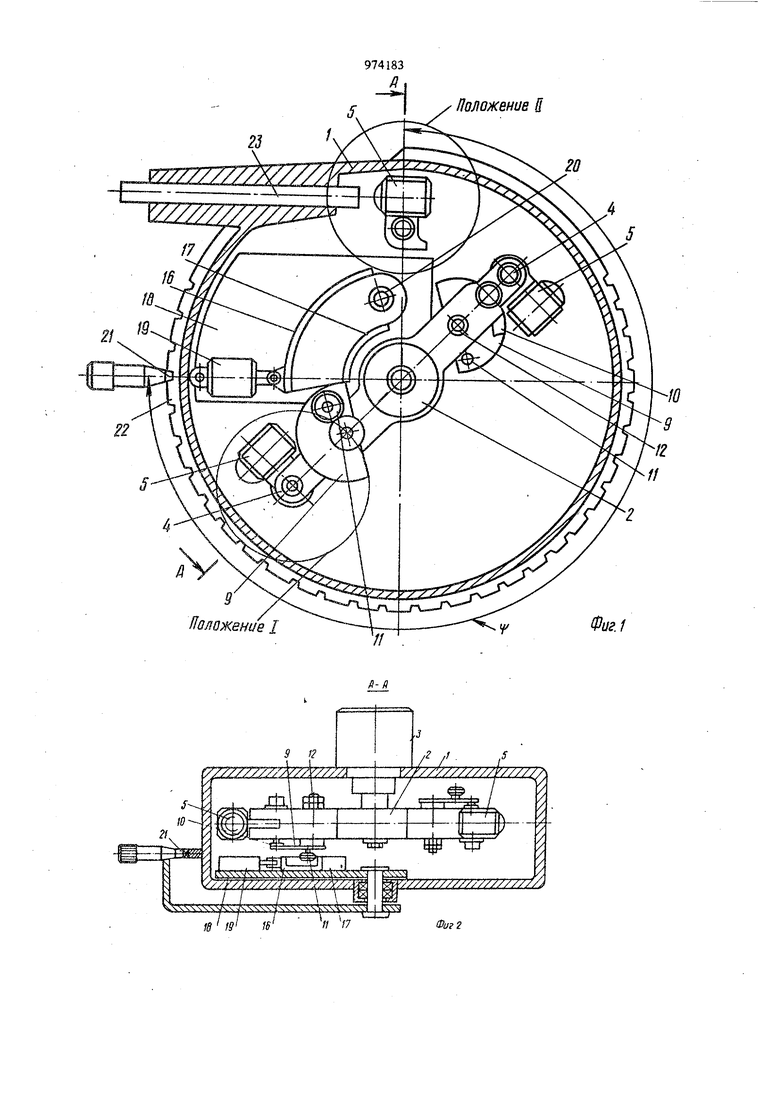
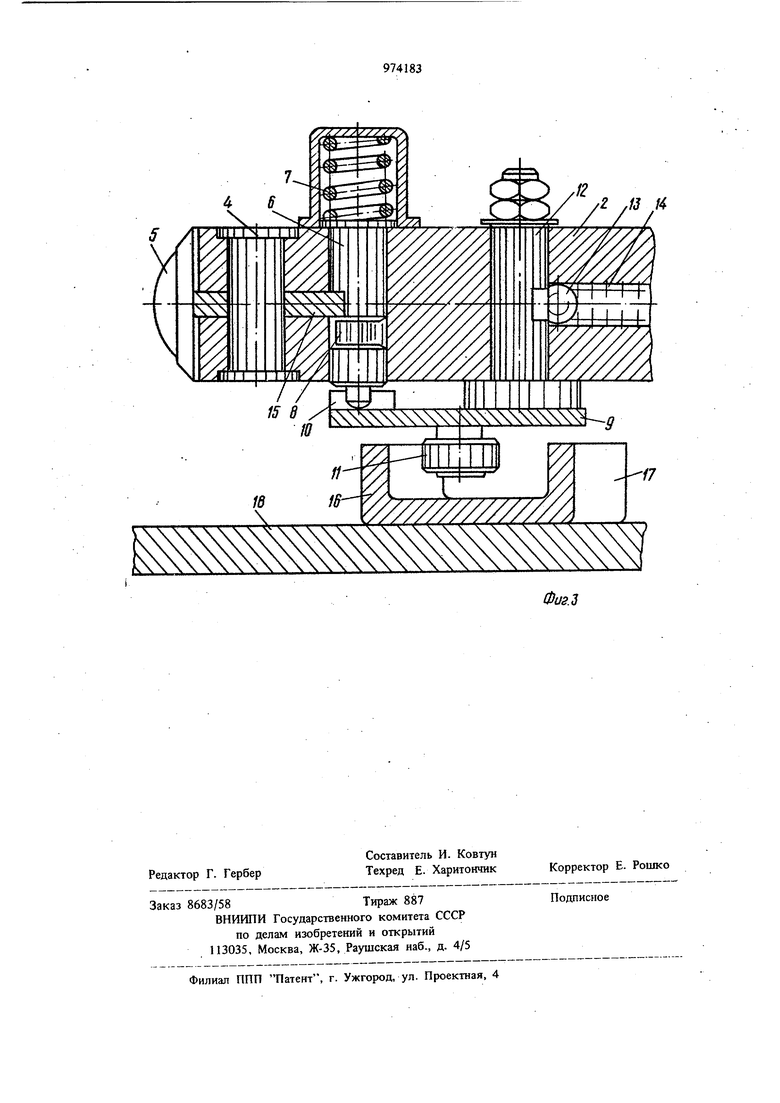
Регулируя положение основания с направляющими относительно рабочего органа при различных скоростях вращения ротора: и массе бойка, получают соударение бойка с рабочим органом при максимальной скорости бойка. На фиг. 1 изобраясено устройство, вад сверху, на фиг. 2 - разрез А-А на фиг. I; на фиг. 3 механизм переключения фиксатора. Устройство содержит корпус 1, в котором размеодеи ротор 2 с приводом 3. На роторе 2 посредством оси 4 шарнирно установлен боек 5. На роторе 2 расположен ноднружинелный фиксатор бойка 5, выполненный в виде пальца 6 и пр окины 7. Палец 6 имеет кольцевую нроточку 8 и установлен с возможностью осевого перемоидения параллельно оси вала ротора 2. Н роторе 2 расположен также механизм переключения фиксатора, включающий кулачок 9, на торцовой повер.чности которого выполнен выступ П виде двухстороннего клина 10, а с прот воположной сторо1ш кулачка 9 установлен ролик П. Кулпюк 9 закреплён на оси 12 поворота и Езаимодействует с ней через шарик 13 с пружиной 14 для фиксации кулачка 9 в крайних положениях. При этом палец б фиксатора взаимодейству ет с клином 10 кулачка 9 с возможностью осевого перемещения фиксатора, причем в одно из крайних положений фиксатора боек 5 удерживается в нефабочем положении посредством имеющегося у него выступа 15. В предаагдамом устройстве имеется также механизм управления фиксатором бойка 5, содержащий жестко связанные между собой направляющие 16 и 17, взаимодействующие с роликом 11 и шарнирно установленные на основании 18, а также привод 19 поворота направляющих 16 и 17 вокруг оси 20. Основание 18 установлено с возможностью поворота вокруг оси вращения ротора 2 и снабжено фикс 1тором 2 его ПОЛОЖСЕШЯ и лимбом 22. Рабочий орган 23 жестко закреплен в корпусе Кроме Того, устройство может 6)Tii снабже ю дополгштельным бойком, фиксатором бойка и механизмом переключения фиксатора, размещенными на диаметрально противоположной стороне ротора и зеркально по отношению к первым, и допелнитеиь п 1м механизмом управления, размещенным зеркально и на противоположной стороне корпуса по отношению к первому. Устройство работает следующим образом. На роторе 2 размещают боек 5 для воспро изведения определенной .цпктелыюсти удара и по лкмбу 22 с помощыо фиксатора 21 повора чивают основание 18 в требуемое положение. При разгоне ротора 2 приводом 3 выступ 15 бойка 5 находатся в контакте с пальцем 6 фиксатора, удерживая боек 5 в нерабочем положении, когда он проходит мимо рабочего органа 23 (положение 1 фиг. 1). Ролик П при этом проходит меж;ду направляющими 16 и 1 не задевая их. При достюкении заданной скоро ти вращения ротора 2 включается привод 19 механизма управлеггая, который поворач1шает 9 4 направляющие 16 и 17 вокруг оси 20, так, что ролик 11 входит во взаимодействие с одной из них, например направляющей 16. При наезде ролика 11 на направляющую 16 кулачок 9 поворачиваетея вокруг оси 12 и клин 10 кулачка воздействует на палец 6 фиксатора бойка 5, который осуществляет осевое перемещение в положение, когда кольцевая проточка 8 располагается напротив выступа 15 бойка 5. При этом получая возмоясность перемещения под действием , центробежной силы инерции, боек 5 поворачивается вокруг оси 4, занимает рабочее положение и производит удар по рабочему орга ну 23 (положение П фиг. 1). В зтом положеним выступ 15 расположен в кольцевой проточке 8 пальца 6, пружина 7 сжата, а кулачок 9 после поворота фиксируется в крайнем положении пружиной 14. После удара боек 5 отскакивает от рабочего органа 23 и приходит в нерабочее положение (положение Г фиг. 1). При этом выступ 15 выходит из кольцевой проточки 8 фиксатора бойка 5, палец 6 которого под действием пружины 7 перемещается вниз, перекрывая проход выступа 15 и таким образом вновь удерживая боек 5 в нерабочем положении. Ролик 11 , находясь на кулачке 9, который установлен в крайнем положении, свободно проходит между направляющими 16 и 17. После того, как ротор 2 снова наберет необходимую скорость, обратным ходом привода 19 направляющие 16 и 17 переводят в прежнее положение. При этом другая направляющая 17 вступает во взаимодействие с роликом 11, поворачивая к лачок 9, который другой стороной клина 10 осуществляет осевое перемещение пальца 6, устанавливая кoльцeв o проточку 8 напротив выступа 15 и позволяя бойку 5 выйти в рабочее положение. Боек 5 вновь производит удар по рабочему органу 23 и возвращается в исходное положение, где выступ 15 выходит из кольцевой проточки 8, и под действием пружины 7 палец 6 фиксирует боек 5 .в нерабочем положении. Устройство может работать, создавая ударную нагрузку на два рабочих органа 23 путем попеременного включения привода 19 первого и второго механизмов управления. Основание 18 фиксируется в положении, при котором обеспечивается оптимальный режим работы устройства, т.е. соударение бойка 5 с рабочим органом 23 в момент достижения бойком 5 максимальной скорости. При зтом положение основания 18 по отнощению к рабочему органу 23 должно удовлетворять соотнощен цогде ф - угол между торцовой плоскостью направлятощих и рабочим органом; „ ЗА„ динамический параметр устройства; MR Эд - момент инерции бойка отиосигельно оси подвеса; М - масса бойка; R -радиус ротора; г - расстояние .от оси подвеса бойка до его центра масс; М -угол поворота бойка. Приведенное выше равенство выведено из соображения, что во время поворота ротор 2 на угол V боек должен повернуться из пол жения 1 на фиг. 1 О в положении II на фиг. I . Таким образом, установочный угол V зависит от динамического параметр D устройства, определяемого геометрическо, массовыми характеристиками бойка. Предлагаемое устройство позволяет регулировать положение направляющих с приводом 3 по отношению к рабочему органу, что обеспечивает возможность получения соударения бойка с рабочим органом в момент наибольшей скорости бойка, т. е. обеспечивает оптимальный режим работы устройства. Фор м у да изобретения Устройство дли создания ударной нагрузки по авт. св. N 832385, отличающееся тем, что, с целью обеспечения оптимального режима работы за счет соударения бойка . с рабочим органом в момент достижения бойком максимальной скорости, оно снабжено основанием. установленным в корпусе с возможностью поворота вокруг оси вращения ротора и фиксатором положения основания, при зтом направляющие с приводом их поворота размещены на основании. Источники информации, принятые во BHKMaiffle экспертизе 1. Авторское свидетельство CCQ И 832385, кл. G 01 М 7/00, 1979 (прототип). /1влвжетв I Положение §
/J 14
16
