(5) ЭЛЕВАТОР ПОЛУАВТОМАТИЧЕСКИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Элеватор полуавтоматический для бурильных труб | 1985 |
|
SU1305298A1 |
| Элеватор | 1984 |
|
SU1208172A1 |
| ПОЛУАВТОМАТИЧЕСКИЙ ЭЛЕВАТОР12 | 1972 |
|
SU419616A1 |
| ПОЛУАВТОМАТИЧЕСКИЙ ЭЛЕВАТОР | 1967 |
|
SU194699A1 |
| Буровая установка | 1982 |
|
SU1046467A1 |
| Элеватор | 1987 |
|
SU1460185A1 |
| Полуавтоматический элеватор | 1983 |
|
SU1266957A1 |
| Элеватор | 1973 |
|
SU607945A1 |
| Полуавтоматический элеватор для бурильных труб | 1983 |
|
SU1090843A1 |
| Полуавтоматический элеватор | 1971 |
|
SU717276A1 |
Изобретение относится к бурению скважин, а именно к устройствам для спуско-подъемных операций с гладкоствольными бурильными трубами.
Известен полуавтоматический 5леватор, который содержит серьгу, корпус с захватными элементами, копир, подпружиненные створки и механизм управления захватными элементами СП,
.Недостатком его является невозможность работы с гладкоствольными бурильными трубами.
Наиболее близким техническим решением к предлагаемому является элеватор полуавтоматический, включающий серьгу, корпус с захватными элементами, копир, подпружиненные Творкй;. и механизм управления захватными элементами Г2,
Недостатком указанного устройства является то, что он не обеспечивает надежный захват и удержание гладкоствольных бурильных труб, что
не позволяет ускорить процесс спускоподъемных операций.
Целью изобретения является повышение надежности работы,элеватора за счет сокращения количества звеньев механизма управления захватными элементами.
Указанная цель достигается тем, что элеватор снабжен, шарнирно сое10диненными с серьгой направляющими, а корпус выполнен из двух, взаимодействующих между собой частей: неподвижной - жестко соединенной с направляющими и подвижной - подпру15жиненной относительно неподвижной части корпуса и установленной с возможностыб перемещения вдоль направляющих, причем последние установлены с возможностью взаимодействия с
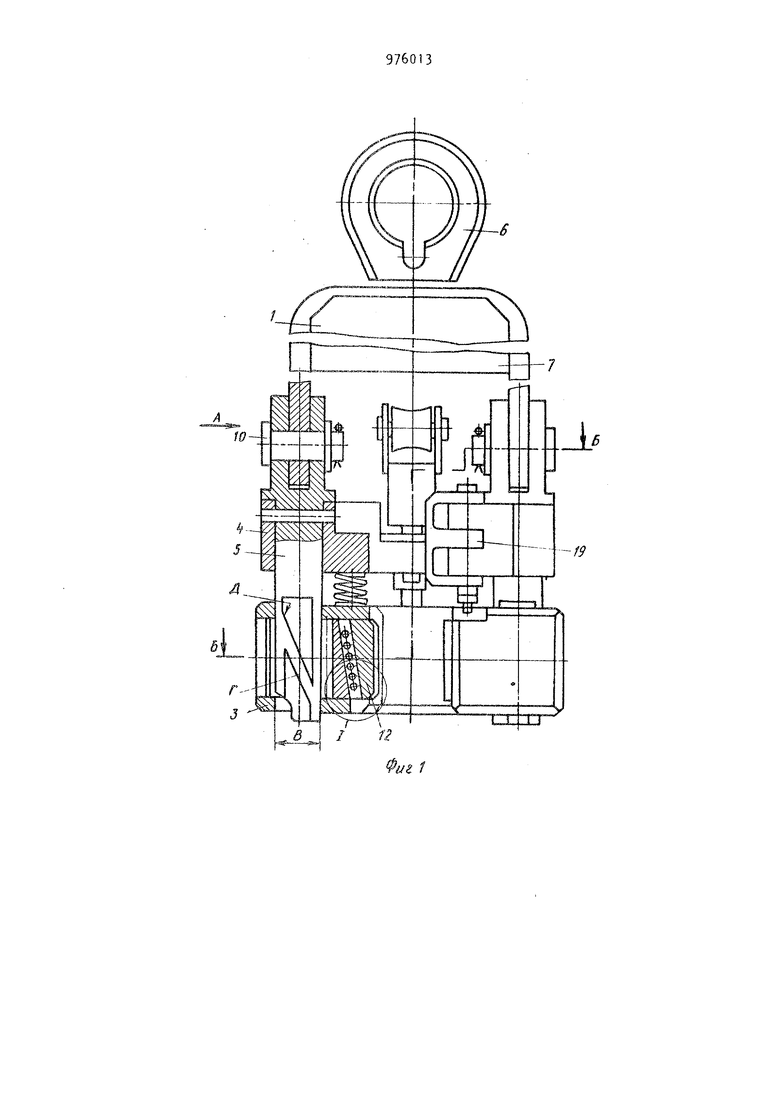
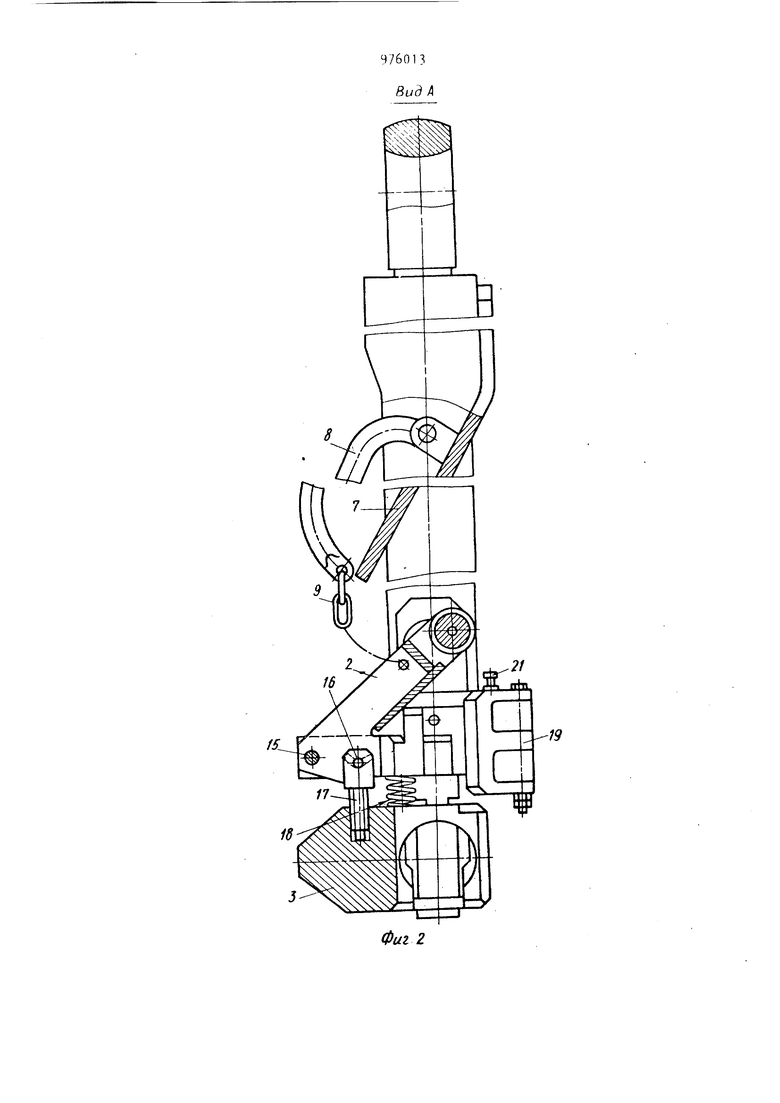
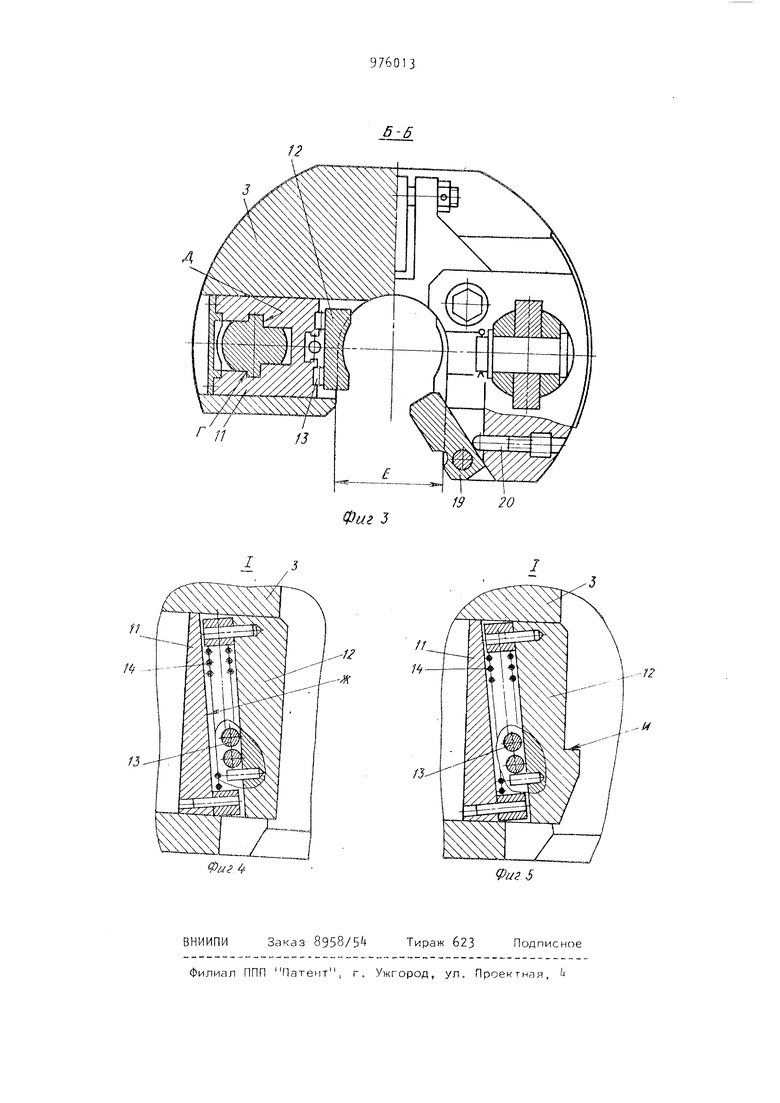
20 захватными элементами, а подвижная и неподвижная части корпуса шарнирно соединены с копиром,установленным в неподвижной части. Такое выполнение устройства значительно сокращает качество звеньев в механизме управления захватными элементами, что повышает надежность захвата и удержания гладкоствольных бурильных труб и устройства в целом На фиг, 1 изображен элеватор, об щий вид; на фи. 2 вид А на фиг. на фиг. 3 разрез Б-Б на фиг, 1; на фиг f - узел I на фиг, 1 ; на фиг. 5 вариант исполнения узла I на фиг, 1, Элеватор состоит из серьги 1, копира 2 корпуса, включающего подвижную 3 и неподвижную i направляющие 5 н деталей захватного и запорного узлов. Серьга 1 с рым-болтом 6 служит д подвешивания зяезатора к талевой системе бурозой установки. Серьга включает отражатель 7, с которым ша мирно соединена рукоятка 8, К друго му концу рукоятки присоединена цель 95 соединяющая рукоятку с копиром 2 Серьга с помош.ью осей 10 шзрнирно соедиыена с напрааляюшими 5 в верхне час и которых крепится неподвижная час гь -корпуса Н -;;кние концы направл Ц1И 5 пропуиемы чсрез отверстия В в подвижн(зй части 3 наклонными пло сгтями Г и Д связаны с захватными злемснгзми 11, размещенными в под части 3; которые совместно с пла1иками 12 при г ереьшщении подвижной части 3 по направляющим 5 под действием наклонных плоскостей Г и Д имеют возможность перемеи атьс в пазах корпуса, обесг1е1-1ивая подвод ОТВОД; плашек 12 к бурильной свече Корпус имеет фронтальную прорезь Е для ввода и вь1вода бурильной свечи. Захватные элементы I1 имеют накл ные плоскости Ж, а плашки 12 оснаи ены роликами 13, обеспечивающими перекатывание по плоскостям Ж, Плашки 1 2 имеют пруи( 1 - , i I л а Ц t а т о bs т ь выполнена в дв вариантах, Для обспечения захвата трубы за ее наружный диаметр, ли1,1ен1ный уступов и проточек; рабо- ая поверхность плашки выполняется параллельно оси центрального проходного отверстия корпуса элеватора, Для обеспечения захвата трубы по торец замка или под торец кольцевой проточки на замке (ниппеле; гплашка выполняется с опор(-(ым буртом И; раочая поверхность которого располагается перпендикулярно оси централього проходного остверстия корпуса леватора, а высота этого бурта менье высоты кольцеовй проточки. Копир 2 осью 15 шарнирно соединен неподвижной частью f корпуса, а осью 16 с тягой 17, которая жестко посредством резьбового соединения закреплена на подвижной части 3. Подвижная часть 3 подпружинена относительно неподвижной части 4 пружиной 18. Запорный узел расположен по обе стороны фронтальной прорези Е в неподвижной части k корпуса и представляет собой поворотные створки 19 которые под действием подпружиненного толкателя 20 частично перекрывают фронтальную прорезь Е и не позволяют бурильной свече отсоединиться от элеватора. В открытом положении створки удерживаются болтом 21. Полуавтоматический элеватор ботает следующим образом. При повороте копира 2 вокруг оси 15 против часовой стрелки происходит осевое перемещение тяги 17 с подвижной частью 3 корпуса вверх по направляющим 5. Захватные элементы 11 с плашками 12 под действием наклонной плоскости Г радиально перемещаются от оси элеватора (освобождают трубу). Под действием пружин 13 и веса корпуса копир 2 стремится опуститься и занять крайнее нижнее положение, при этом захватные элементы 11 под действием наклонной плоскости Д перемещаются радиально к оси элеватора (происходит захват трубы i ; а копир 2 занимает нижнее исходное riojiowci kie. Под действием силы трения, возникаюа1ей между поверхностями захватываемой трубы и плашками 12, последние, перекатываясь на роликах 13, опускаются по наклого-юй плоскости Ж захватных элементов 11 и как клин зажимают трубу. При перемещении подвижной части 3 вверх по направляющим 5 захватные элементы 1 1 гюр, д вием наклонных плоскост(й Г и водятся от бурильной трубы, о ки 12 под действием пружин i нимаются в исход -1се положение подъемом бурильной колонны из жины толкатель 19 утапливают неподвижной части корпуса и в таком -|Олто,м 21 , обе-:положении фиксируют
59
печивая постоянно открытой фронтальную прорезь Е. Копир 2 поворачивают против часовой стрелки. Вместе с ним через тягу 17 поднимается подвижная часть 3 по направляющим 5 и захватные элементы 11 вместе с плашками 12 перемещаются радиально от оси элеватора. Корпус элеватора свободно надевают центральным отверстием на верхний конец бурильной трубы, После этого копир 2 освобождают; подвижная часть 3 под действием усилий пружин 18 и собственного веса опускается, плашки 12 с захватными элементами 11 под действием наклонных плос костей Г и Д перемещаются радиально к оси элеватора и прижимаются к бурильной трубе. При подъеме элеватора плашки 12, опускаясь по наклонной плоскости Ж, заклинят бурильную трубу в элеваторе и колонна труб будет подниматься,
При установке отвинченной бурильной свечи на подсвечник элеватор, опускаяс-ь вниз, несколько приподнимет подвижную часть 3, усилие прижатия плашек 12 ослабевает, и элеватор будет опускаться вния. Верхний конец бурильной свечи нажмет на копир 2 и повернет его nputviB часовой стрелки, При этом подвижная часть 3 поднимется и плашки 12 с захватными элементами 11 радиально переместятся от оси элеватора, освобождая бурильную свечу. При дальнейшем опускании элеватора верхний конец бурильной трубы, коснется отражателя и отсоединится от бурильной свечи.
Перед опускан Ием колонны бурильных труб в скважину ослабляют б5лт 21 и створки 19.ПОД действиём подпружиненного толкателя 20 выходят из паза и перекрывают часть фронтальной прорези Е неподвижной части k корпуса элеватора. Копир 2 поворачивают против часовой стрелки, и корпус через фронтальную прорезь Е заводят на бурильную свечу, стоящую на подсвечнике. При этом створки 19 упираясь в трубу, поворачиваются и убираются в пазы, пропуская бурильную трубу внутрь корпуса элеватора, после чего створки 19 под действием подпружиненных толкателей 20 повернутся и перекроют фронтальную прорезь Е в неподвижной части 4, В таком положении производят подъем элеватора по бурильной свече. Когда элеВ;атор достигнет верхнего торца бу3 .6
рильной свечи, копир 2 под действием усилий пружин 18 и веса корпуса, постойнно прижимаясь к поверхности трубы, поворачивается по часовой стрелке, подвижная часть 3 корпуса опускается по направляющим 5 г и плашки 12 с захватными элементами 11 под действием плоскостей Г и Д перемещаются к оси элеватора и упираются в бурильную трубу. За счет возникновения силы трения между трубой и плашками последние несколько перемещаются вниз по наклонной плоскости Ж захватных элементов 11, заклинивают трубу и бурильная свеча поднимается вместе с элеватором.
Благодаря тому, что значительно сокращается количество звеньев в механизме управления захватными элементами, повышается надежность захвата и удержания гладкоствольных бурильных труб и устройства в целом.
Формула изобретения
Элеватор полуавтоматический, включающий серьгу, корпус с захватными элементами, копир, подпружиненные створки и механизм управления захватными элементами,о тличающийс я тем, что , с целью повышения надежности работы элеватора за счет сокращения количества звеньев механизма управления захватными элементами,он снабжен шарнирно соединенными с серьгой.направляющими,а корпус выполнен из двух взаимодействующих между собой частей: неподвижной -жестко соединенной с направляющими и подвиж ной - подпружиненной относительно неподвижной части корпуса и установленной с возможностью перемещения вдоль направляющих, причем последние установлены с возможностью взаимодействия с захватными элементами, а подвижная и неподвижная части корпуса шарнирно соединены с копиром, установленным в неподвижной части.
Источники информации, принятые во внимание при экспертизе
