(5) УСТРОЙСТВО для ИЗМЕРЕНИЯ ВЕЛИЧИНЫ И СКОРОСТИ ПЕРЕМЕЩЕНИЙ И ОБЪЕКТА Изобретение относится к измеритель ной технике, в частности к оптической интерферометрии, и может быть использовано для дистанционного бесконтактного измерения величины и скорости малых перемещений различных объектов. Известно устройство для измерения скорости перемещения объектов, содержащее двухлучевой интерферометр, источник когерентного излучения, преобразователь модулирующих сигналов, диафрагму и фотоприемник на выходе ин-, терферометра, соединенн е последовательно блок выделения частотно-модули ровдннбго сигнала vi фильtp нижних частот, включенные между фотоприемником и преобразователем модулирующих сигналов 13. Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для измерения величины и скорости перемещения объекта, содержащее источник когерентного излучения, двухлучевой интерферометр с опорной и измерительной ветвью, с оптическим блоком фокусировки луча на объект в измерительной ветви и отражателем в опорной ветви, модулятор, связанный с отражателем, диафрагму и фотоприемник, установленные последовательно на выходе двухлучевого интерферометра, блок формирования модулирующих сигналов, первый выход которого подключен к модулятору, фильтр нижних частот, первый полосовой фильтр и два генератора электрических сигналов. В устройстве источник когерентного излучения неуправляем 2. Недостатком известного устройства является то, что оно не обеспечивает достаточно высокой точности измерения параметров движения диффузно рассеивающих объектов при наличии помех, так как воздействие мешающих факторов таких, как вибрация, турбулентное движение воздуха
на трассе распространения измерительного луча, нестабильность углового положения луча на выходе источника когерентного излучения и др., приводит к перемещению луча на поверхности объекта. При этом в связи с тем, что распределение интенсивности в плоскости чувствительной площадки фотоприемника является результатом интерференции диафрагированных на элементарных отражателях диффузнр рассеивающей поверхности лучей мeждJ собой и с опорным пучком, электрический сигнал промежуточной частоты в блоке выделения фазомодулированных сигналов оказывается промодулированным низкочастотной помехой, представляющей собой случайный процесс. Глубина модуляции полезного ,сигнала помехой возрастает с увеличе- 2о нием длины измерительной ветви интерферометраЦелью изобретения является повышение точности измерения перемещения диффузно рассеивающих объектов при наличии помех о Поста(вленная цель достигается тем, что устройство для измерения величины и скорости перемещенияобъекта, содержащее источник когерентного излучения, двухлучевой интерферометр с опорной и измерительной ветвями-, с оптическим блоком фокусировки луча на объект в измерительной ветви и отража телем в опорной ветви, модулятор, свя занный с отражателем, диафрагму и фотоприемник, установленные последовательно на выходе двухлучевого интерферометра, блок формирования модулирующих сигналов, первый выход которого подключен к модулятору, фильтр ниж них частот, первый полосовой фильтр и два генератора электрических сигналов, снабжено двухкоординатным дефектором оптического излучения, соединенными последовательно блоком выделения сигналов промежуточной частоты, соединенным с фотоприемником, блоком детектирования, вторым полосовым филь тром, и двумя каналами управления, каждый из которых состоит из соединен ных по 1ледовательно балансного детектора, блока формирования управляющего напряжения и сумматора, в каждом из каналоЕ управления вторые входы сумма торов подключены к соответствующим ге нераторам электрических сигналов и ат рым входам балансных детекторов, выхо ды сумматоров соединены с соответству
щими входами двухкоординатного дефлек тора, а балансные детекторы - с соответствующими полосовыми фильтрами, вхо ды последних соединены между собой и с
первым входом блока детектирования, второй его выход является первым выходом устройства, а третий соединен с фильтром нижних частот и является вторым выходом устройства, источник когерентного излучения выполнен управляемым, а выход фильтра нижних частот соединен с управляющим входом последнего,второй выход блока формирования модулирующих импульсов соединен с вторым
входом блока детектирования
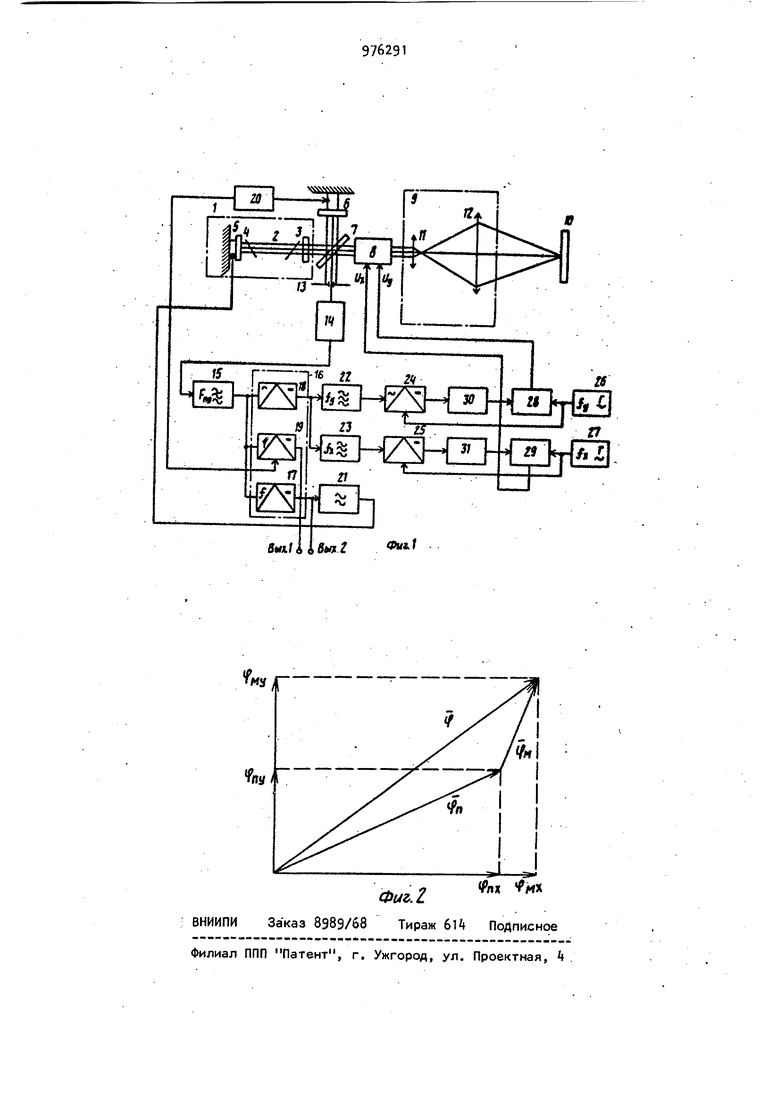
На фиго 1 представлена блок-схема устройства для измерения величины и скорости перемещения объектов,- на фиг о 2 - векторная диаграмма переме щения зоны облучения на поверхности объекта, параметры движения которого измеряютсЯо Устройство для измерения величины и скорости перемещения объектов со- , ержит управляемый по частоте источник 1 когерентного излучения, состоящий из лазерного активного вещества 2 и зеркал 3 и 4 резонатора. Зеркало резонатора установлено на пьезокерамическом элементе 5о (В данном примере выполнения для управления частотой источника когерентного излучения используется пьезокерамический привод одного из зеркал резонатора. В устройстве могут использоваться источники когерентного излучения, частота которых изменяется каким-либо другим образом, например путем изменения оптической длины резонатора с помощью электрооптических кристаллов или за счет использования эффекта Зеемана и ,). По ходу выходного луча источника когерентного излучения установлен двухлучевой интерферометр, состоящий из оптически связанных отражателя и связанного с ним модулятора б, полупрозрачного зеркала 7, установленного в опорной ветви интерферометра, двухкоординатного дефлектора 8, установленного в измерительной ветви интерферометра, оптического блока 9 фокусировки луча на объект 10, состоящего из короткофокусной 11 и длиннофокусной 12 компонент, диафрагмы 13 и фотоприемника 14, установленных на интерферометра. К выходу фотоприемника 1 подключен блок 15 выделения сигналов промежуточной частоты.
выход которого соединен с блоком 16 детектирования, состоящим из частотного 17, амплитудного 18 и фазового 19 детекторов. Входы этих детекторов соединены между собой и являются одним из входов блока 1б детектирования, другим входом которого является вход опорного напряжения фазового детектора 19, к которому подключен один из выходов блока 20 формирования модулирующих сигналов. Второй выход блока 20 формирования модулирующих сигналов подключен к модулятору 6. Выход частотного детектора 17 через фильтр 21 нижних частот подключен к управляющему входу источника 1 когерентного излучения. .К выходу амплитудного детектора 18 подключены два полосовых фильтра 22 и 23, выходы которых соединены с сигнальными входами соответствующих балансных детекторов 2k и 25, Опорные входы балансных детекторов 2k и 25 подключены к выходам соответствующих генераторов 26 и. 27 электрических сигналов. Выходы генераторов 26 и 27 одновременно подключены к соответствующим входам сумматоров 28 и 29, к другим входам которых подключены выходы соответствующйх блоков 30 и 31 формирования управляющих напряжений, входы которых соединены с выходами балансных детекторов 2k и 25. Выходы сумматоров 28 и 29 соединены с соответствующими входами двухкоординатного дефлектора.
Устройство для измерения величины и скорости перемещения объекта работает следующим образом.
Выходной луч источника 1 когерентного излучения с помощью полупрозрачного зеркала 7 делится на два луча, которые направляются в опорную и измерительную ветви интерферометра В опорной ветви луч падает на отражат тель модулятора 6, с помснцью которого направляется через полупрозрачное .зеркало 7 на диафрагму 13. В измерительной ветви интерферометра луч проходит через дефлектор 8, с помощью которого осуществляется отклонение оптической оси луча по углу в двух взаимно перпендикулярных направлениях. Величина углового отклонения оптической оси пропорциональна напряжению, поступающему на электрические входы дефлектора 8, С выхода дефлектора 8 луч направляется в оптический блок 9 для фокусировки измерительного луча на
объект 10. Оптический блок 9 представляет собой телескопическую систему, короткофокусная 11 и длиннофокусная
12компоненты которой фокусируют излучение на поверхности объекта 10. Часть рассеянного этой поверхностью излучения попадает обратно в оптический блок 9 и через дефлектор 8 и полупрозрачное зеркало 7 направляется на диафрагму 13о В плоскости диафрагмы
13осуществляется, таким образом, сложение опорного и измерительного лучей. В результате этого образуется интерференционная картина, полосы которой перемещаются в плоскости диафрагмы 13 в соответствии с изменениями разности хода интерферирующих лучей а Это приводит к тому, что излучение, прошедшее через диафрагму
13 на чувствительную площадку фотоприемника 14, модулируется по интенсивности, В соответствии с принципом работы двухлучевого интерферометра электрическое напряжение на выходе фотоприемника It связано с изменениями разности хода интерферирующих лучей следующим соотношением
UCtl Mt)oos(iJi ), (1)
где A(t) - амплитудный множитель, зависимость которого от времени t определяется флуктуациями интенсивности измерительного лучя; u(t) - разность хода интерферирующих Лучей; Л - длина волны излучения ис
точника 1-.
Разность хода интерферирующих лучей л() содержит некоторую постоянную составляющую лЕЬ, определяемую начальной разностью оптических длин путей опорного и измерительного лучей и переменные составляю(цие uB|sn(t) и лЕи()« которые определяются-действием отражателя с модулятором 6 и перемещениями поверхности объекта 10 соответственно. Кроме того, величина uB(t) содержит также, как правило, помеховую составляющую uEp(t), определяемую воздействием вибраций на объект 10 и оптические элементы интерферометра, турбулентным движением воздуха, изменениями температуры, влажности и давления, изценениями разности хода интерферирующих лучей, возникающими в результате действия flectjneKtopa 8, и другими мешающими факто0ами,,. На модулятор 6 подается напряжение от блока 20 формирования модули рующих сигналов,, ft соответствии с известным принципом синтеза в лазер ном интерферометре фазомодулированной (ФМ) поднесущей путем двухчастотной модуляции разности фаз интерфеоирующих лучей блок 20 формирования модулирукйцих сигналов вырабатывает напряжение, представляющее собой сумму двух гармонических напряжений с определенным образом выбранными амплитудами, частотами и начальными фазами В предлагаемом устройстве для измерения величины и скорости перемещения объектов напряжение, подаваемое на модулятор 6 определяется выражением Ult) - UjSiniiOot , (2) Где и,, и U2 амплитуды гармонических составляющих, uJ j:2Jlfo - частота, Значения 1Ц и IJn выбраны в соответствии с известными условиями полумения на выходе полосового фильтра 15. М сигнала, для напряжения которого справедливо соотиошечие Г ле,(-Ь) U()cosluJot 2J( (5) где B(t) - амплитудный множитель, о личаюьцийся от A(t) на по стоянный множитель, равный коэффициенту передач полосового фиЛьтра 15 Ae(t)aef,U) с выхода полосового фильтра ,15 М сигнал вида (З) поступает на вход блока 16 детектирования, в котором осуществляется частотное, амплитудное и фазовое детектирование этого сй гнала. На выходе частотного детек тора 17 при этом имеет место электрический сигнал, содержащий состав ляющу1о, величина которой пропорциональна скорости перемещения объекта 10, т.е. )3 Одновременно на выходе частотного детектора 17 содержится составляюща сигнала, величина Которой пропорцио нал ь на AZnw: 1 Зта составляющая является помехой. Для устранения влияния помехи на результаты измерений сигнал с выхода частотного детектора 17 поступает на фильтр 21 нижних частот, который пропускает только помеху, С выхода этого фильтра электрическое напряжение пропорциональное отклонению частоты поднесущей под действием помехи, подается на пьезокерамический элемент 5, управляющий частотой излучения источника 1 о Полярность этого напряжения выбирается такой, чтобы изменения частоты излучения были противоположны изменениям частоты поднесущей на выходе фильтра 15, имеющим место в результате действия помех Таким образом, в устройстве осуществляется автоматическая подстройка частоты (АПЧ) источника 1 когерентного излучения, чем обеспечивается подавление помех на выходе частотного и фазового детекторов 17 и 19 и, следовательно, повышение точности измеренийВ устройстве возможно также использование фазовой автоматической подстройки частоты (ФАПЧ) источника когерентного излучения 1, которая обеспечивает большую степень подавления помех ло сравнению с АПЧ„ С этой целью напряжение с выхода фазового детектора 19 должно быть подано через дополнительный фильтр нижних частот на управляющий вход источника 1 когерентного излучения В результате действия систем АПЧ и ФАПЧ на выходе частотного и фазового детекторов 17 и 19 выделяются неискаженные помехами, модулирующими разность фаз интерферирующих лучей, электрические сигналы, пропорциональные измеряемым параметрам движения объекта 10 Тое. скорости и величине перемещения соответственно о В связи с тем, что флуктуации пространственного положения оптической оси измерительной ветви интерферометра приводят к перемещению зоны облучения на поверхности объекта 10, которая является диффузно рассеивающей, имеет место модуляции рассеянного объектом 10 излучения по интенсивности. Это приводит к модуляции помехой амплитуды электрического сигнала на выходе полосового фильтра 15с Глубина этой модуляции определяется величиной отклонения оптической оси измерительного луча от среднего по9ложения. При этом модулирующая функ ция (помеха; не зависит от направле имя этого отклонения. Для устранения влияния данных помех на точност измерений в устройстве применена сие тема автоматический стабилизации положения зоны облучения на поверхности объекта 1П, которая работает следующим образом. На каждый из входов дефлектора 8 оптического излучения от генераторов 26 и 27 через сумматоры 28 и 29 соответственно подаются напряжения с различными частотами ио,( и ии . Под действием этих напряжений происходит сканирование положения зон облучения на поверхности объекта 10 по двум взаимно перпендикулярным осям X и у. (На фиг. 2 представлено расположение векторов -f п и м перемещения зоны облучения на поверхности объекта 10 под действием дестабилизирующих факторов и сигналов сканирования соответственно). Из векторной диаграммы (фиг. 2) следует, что составляющие смещения зоны облучения по каждой из осей х и у /x и Ч:У определяются выражениями y где пх П:У составляющие смещения зоны облучения, под действием дестабилизи, рующих факторов по ося X и у соответственно Чму и ivvv,- составляющие смещения зоны облучения под дей ствием сигналов сканирования по осям X и у соответственно. Так как величина вектора полного перемещения зоны облучения под действием дестабилизирующих факторов и сигналов сканирования определяются выражением . . . 1/ (ifi и.2И/2 , (6) то в огибающей B(t) сигнала на выходе фильтра 15 присутствуют балансно модулированные помехой составляющие с частотами ЫхИ uj . При этом сигнал с частотой Юх балансно модулирован составляюи;ей сигнал с , .„, частотой uJvj-ЧПУ соответственно. Оги бающая B(t) выделяется амплитудным детектором 18, с выхода которого си нал поступает на входы фильтров 22 и 110 23. настроенных на частоты си,, и u) соответственно. С выходов каждого из фильтров 22 и 23 сигналы поступают на балансные детекторы 2 и 25, на опорные входы которых одновременно подаются сигналы от соответствующих генераторов 2Ь и 27, На выходе балансных детекторов 24 и 25, таким образом, выделяются сигналы, величина которых пропорциональна отклонению положения зоны облучения на поверхности объекта 10 по каждой из осей X и у. Эти сигналы поступают в блоки 30 и 31 формирования управляющих напряжений соответственно, с помощью которых формируются требуемые динамические характеристики системы стабилизации положения зоны облучения. В состав этих блоков могут входить интеграторы, дифференцирующие каскады, инерционные звенья, нормирующие усилители и т„д. Конкретный состав блоков 30 и 31 зависит от типа используемого дефлектора, требуемой точности стабилизации положения зон облучения и характера дестабилизирующих воздействий о Управляющие напряжения с выхода блоков 30 и 31 подаются на соответствующие входы сумматоров 28 и 29, в которых осуществляется сложение этих напряжений с выходными напряжениями генераторов 26 и 27 соответственно о С выходов сумматоров 28 и 29 управляющие напряжения поступают на входы дефлектора 8 для управления положением оптической оси измерительного луча, а следовательно, и положением зон облучения на поверхности объекта 10, Полярность включения управляЮ1Чих напряжений выбрана такой, чтобы обеспечивалась автоматическая компенсация отклонений полонения зон облучения, происходящих под действием дестабилизирующих факторов. В результате этого устраняется модуляция интенсивности измерительного луча помехой, и, соответственно, повышается точность измерений величины и скорости перемещения диффузно рассеивающих объектов при наличии помех. Таким образом, в предлагаемом устройстве осуществляется автоматическая стабилизация положения зоны облучения на поверхность объекта. Так как при этом фазовые соотношения парциальных лучей, рассеянных элементар ными отражателями поверхности объекта и приходящих в плоскость диафрагмы, остаются постоянными (или изменяются незначительно), то флуктуации интенсивности падающегона фотоприемник излучения, обусловленные воздействием дестабилизирующих фактороЕ), существенно уменьшаются. Следовательно, глубина амилитудной моду ляции помехой ФМ сигнала на выходе фильтра также снижается и а широком диапазоне дестабилизирующих.воздействий, приводящих к флуктуациям углового положения оптической оси измерительного луча и, как следствие, к флуктуациям положения зоны облучения на поверхности объекта, не при водит к появлению ошибок измерения, Этим обеспечивается повышение точности измерения величины и скорости перемещения диффузно рассеивающих S объектов при наличии помех. Кроме то го, использование в устройстве автоматической подстройки частоты источника 1 излучения обеспечивает подавление помех, модулирующая разность фаз интерферирующих лучей, в более широк(эм диапазоне уровней, чем в случаз применения автоподстройки частоты генератора электрических сигналов в блоке формирования модулирующих сигналов Технические преимущества известного устройства обеспечивают возмож ность измерения параметров движения диффузно рассеивающих объектов при увеличенной в 15-20 раз и болеедли не опорной и измерительной ветвей .интерферометра при наличии помех, а экономические позволяют осуществлят измерения в труднодоступных местах и зонах действия вредных для операторов и измерительной установки фак торов. Формула изобретения Устройство для измерения величины и скорости перемещений объекта, содержащее источник когерентного из лучения, двухлучевой интерферометр с опорной и измерительной ветвями, с оптическим блоком фокусировки луча на объект в измерительной ветви и отражателем в опорной ветви, моду лятор, связанный с отражателем, ди112афрагму и фотоприемник, установленные последовательно на выходе двухлучеаого интерферометра, блок формирования модулирующих сигналов, первый выход которого подключен к модулятору, фильтр нижних частот, первый полосовой )ильтр и два генератора электрических сигналов, отличающееся тем, что, с целью повышения точности измерения перемещения диффузно рассеивающих объектов при наличии помех, оно снабжено двухкоординатным дефлектором оптического излучения, установленным а измерительной ветви двухлучевого интерферометра, соединенными последовательно блоком выделения сигналов промежуточной частоты, соединенным с фотоприемником, блоком детектирования, вторым полюсовым фильтром, и двумя каналами управления, каждый из которых состоит из соединённых последовательно балансного детектора, блока, формирования управляющего напряжения и сумматора, в каждом из каналов управления вторые входы сумматоров подключены к соответствующим генераторам электрических сигналов и вторым входам балансных детекторов, выходы сумматоровсоединены с соответствующими входами двухкоординатного дефлектора, а балансные детекторы - с соответствующими полосовыми фильтрами, входы последних соединены между собой и с первыми выходами блока детектировым выходом устройства, а.третий соединен с фильтром нижних частот и является вторым выходом устройства, источник когерентного излучения выполнен управляемым, а выход фильтра ниж- : них частот соединен с управляющим входом последнего, второй выход блока формирования модулирующих импульсов соединен с вторым входом блока детектирования „ Источники информации, принятые во внимание при экспертизе 1 о Авторское свидетельство СССР по. заявке М° .2706964/18-28, кл. П 01 В 9/02, 1979о 2а Авторское свидетельство СССР по заявке № , кл. G 01 В Л/00, (прототип).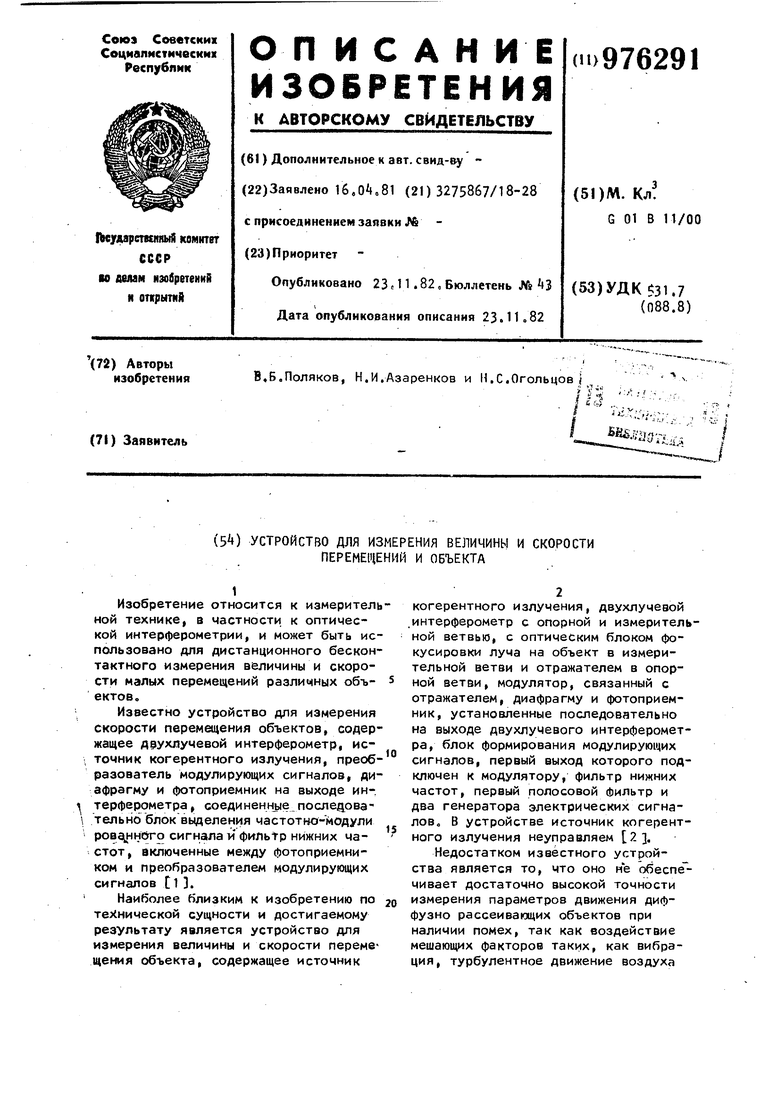
| название | год | авторы | номер документа |
|---|---|---|---|
| ОРБИТАЛЬНЫЙ ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 2024 |
|
RU2839265C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1989 |
|
SU1619847A1 |
| Оптико-электронное устройство для измерения линейных перемещений | 1987 |
|
SU1441198A1 |
| Устройство для измерения скорости | 1977 |
|
SU1034497A1 |
| СПОСОБ КОНТРОЛЯ ОПТИЧЕСКОГО ВЗАИМОДЕЙСТВИЯ С ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2188389C2 |
| Устройство для измерения фазовых сдвигов излучения ик-диапазона | 1974 |
|
SU506755A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ КАПИЛЛЯРНОГО КРОВОТОКА | 2002 |
|
RU2231286C1 |
| ИНТЕРФЕРОМЕТРИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2005 |
|
RU2307318C1 |
| Устройство для бесконтактного дистанционного измерения параметров ультразвуковых колебаний | 1988 |
|
SU1516968A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2015 |
|
RU2601530C1 |