(5 ) ДАТЧИК ПОЛОЖЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 1991 |
|
RU2006088C1 |
| Датчик положения | 1979 |
|
SU859797A1 |
| ДАТЧИК ПАРАМЕТРОВ ВРАЩЕНИЯ | 1997 |
|
RU2121692C1 |
| ДАТЧИК ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ | 2013 |
|
RU2552124C1 |
| Датчик для систем зажигания двигателей внутреннего сгорания | 1980 |
|
SU875114A1 |
| ДАТЧИК МАГНИТНОГО ПОЛЯ | 1998 |
|
RU2153648C2 |
| Магнитоупругий датчик усилия | 1980 |
|
SU909595A1 |
| УСТРОЙСТВО ЭКСПРЕСС-КОНТРОЛЯ МАГНИТНЫХ ХАРАКТЕРИСТИК ЛИСТОВОЙ ЭЛЕКТРОТЕХНИЧЕСКОЙ СТАЛИ | 2014 |
|
RU2551639C1 |
| Многоустойчивый накопительный элемент | 1975 |
|
SU533985A2 |
| СПОСОБ ЦИФРОВОГО БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОГО ТОКА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2176799C1 |
1
Изобретение относится к электроизмерительной технике и может быть использовано для определения положения и скорости механически вращающегося объекта.
Известен генераторный датчик поло жения и скорости перемещения для электронных систем зажигания двигателей внутреннего сгорания, состоящий из магнитопровода с неподви хной ю катушкой, источника магнитодвижущей силы и ферромагнитного коммутатора 1.
Недостатком датчиков является низкое значение генерируемого сигнала 15 при малой скорости перемещения ферромагнитного коммутатора.
Известен датчик положения, содержащий магнитопровод с измерительной 20 обмоткой и элементом с прямоугольной петлей гистерезиса (ППГ), источник магнитодвижущей силы и ферромагнитный коммутатор 2j.
Однако в известном датчике источник магнитодвижущей силы связан с ферромагнитным коммутаторбм, т.е. с механически движущимся объектом, что снижает надежность датчика и ограничивает область его применения.
Цель изобретения - повышение надежности датчика.
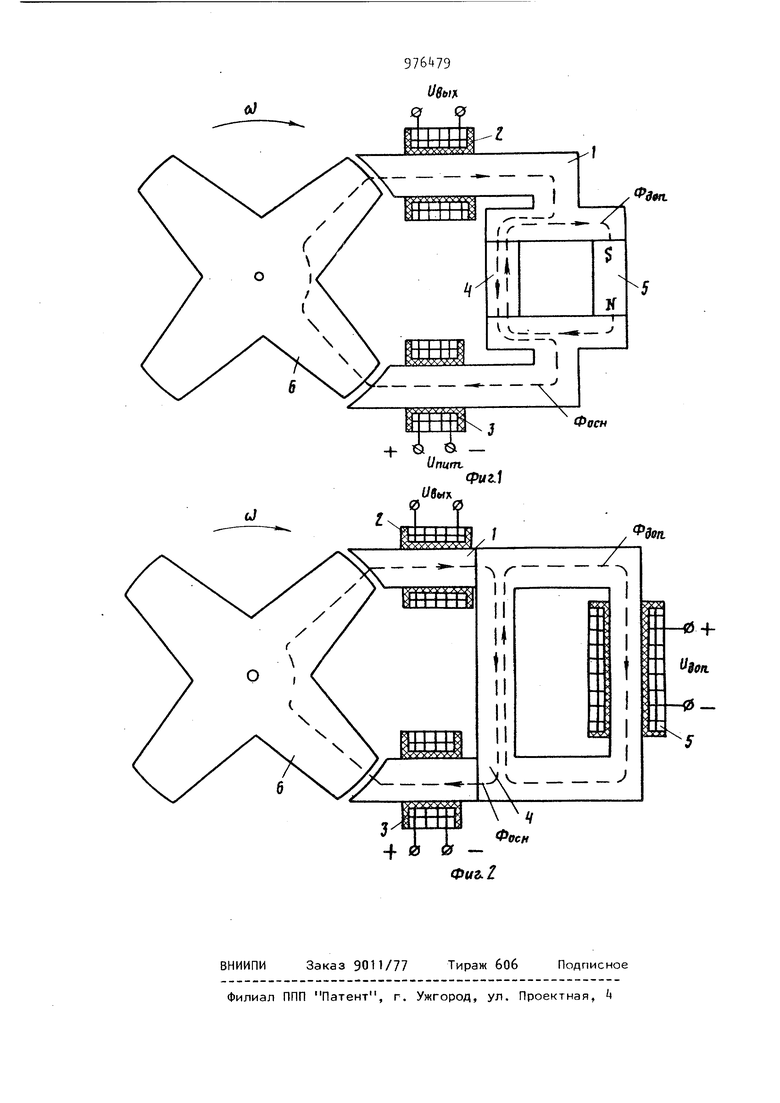
Цель достигается тем, что датчик положения, содержащий магнитопровод с измерительной обмоткой и элементом с прямоугольной петлей гистерезиса, ферромагнитный коммутатор и источник магнитодвижущей силы, снабжен дополнительным источником магнитодвижущей силы, магнитопровод выполнен разветвленным, при этом дополнительный источник магнитодвижущей силы расположен на одной ветви магнитопровода, другой ветвью которого является элемент с прямоугольной петлей гистерезиса, а основной источник магнитодвижущей силы расположен на неразветвленной части магнитопровода Поскольку основной источник магнитодвижущей силы связан с неподвижным магнитопроводом и не подвергается динамическим нагрузкам, на дежность датчика повышается. Кроме того, в качестве ферромагнитного коммутатора могут быть использованы движущиеся элементы машин (зубчатые колеса, рейки с выступами и т.д.). На фиг. 1 изображена конструкция Датчика положения, в которой в качестве дополнительного источника маг нитодвижущей силы используется постоянный магнит; на фиг, 2 - вариант конструкции датчика, в которой дополнительным источником магнитодвижущей силы является катушка с током Индуктивный датчик положения содержит магнитопровод 1 с установленными на нем измерительной катушкой 2 и основным источником 3 магнитодвихчущей силы, элемент 4 с ППГ. Параллельно элементу 4 включен дополнительный источник 5 магнитодвижущей силы, который представляет собой либо постоянный магнит, либо катушку с током. Магнитопровод замыкается фа ромагнитным коммутатором 6. Устройство работает Следующим образом. При разомкнутом магнитопроводе 1 элемент t, выполненный из материала со скачкообразной намагниченностью, находится в насыщении. По нему протекает магнитный поток, создаваемый дополнительным источником магнитодви.ущей силы 5. Магнитный поток от основного источника 3 магнитодвижущей силы через элемент + не проходит и сигнал на выходе измерительной катушки 2 отсутствует. При вращении ферромагнитного ко мутатора 6 замыкается магнитопровод и по нему начинает проходить магнитный поток от основного источника 3 магнитодвижущей силы, превышающий по величине поток от дополнительного источника 5 магнитодвижущей силы, причем магнитный поток, вызываемый основным источником 3. в элементе А направлен встречно магнитному потоку от дополнительного источника 5, поэтому в элементе Ц с ППГ перемагничи вается в противоположное состояние, при этом в измерительной катушке 2 наводится ЭДС. Момент срабатывания характеризует поломение ферромагнитного коммутатора 6, а частота импульсов несет информацию о скорости вращения . При дальнейшем движении ферромагнитного коммутатора 6 магнитопровод 1 размьжается, а элемент А под действием дополнительного источника магнитодвижущей силы 5 перемагничивается в исходное состояние. В этом случае в катушке 2 электродвижущая сила- не наводится и сигнал на выходе катушки отсутствует. В дальнейшем процесс повторяется. Предлагаемый датчик положения позволит повысить надежность автоматических систем за счет того, что источник магнитодвижущей силы расположен на неподвижном магнитопроводе, а в катушке наводится электродвижущая сила не знакопеременным, а пульсирующим потоком, что способствует повышению точности измерений. Кроме того, функциональные возможности датчика и область его применения расширяются, так как в качестве ферромагнитного коммутатора могут быть использованы движущие элементы машин (зубчатые колеса, рейки с выступами и т.д.). Формула изобретения Датчик положения, содержащий магнитопровод с измерительной обмоткой и элементом с прямоугольной петлей гистерезиса, ферромагнитный коммутатор и источник магнитодвижущей силы, отличающийся тем, что, с целью повышения надежности, он снабжен дополнительным источником магнитодвижущей силы, магнитопровод выполнен разветвленным, при этом дополнительный источник магнитодвижущей силы расположен на одной ветви магнитопровода, другой ветвью которого является элемент с прямоугольной петлей гистерезиса, а основной источник магнитодвижущей силы расположен на неразветвленной части магнитопровода. Источники информации, принятые во внимание при экспертизе 1. Глезер Г.Н,, Опарин И.Мо Автомобильные электронные системы зажигания. М., Машиностроение, 1977, с. k6, 2. Авторское свидетельство СССР № 8751U, кл. F 02 Р 3/00, 1980.
Ф(/а/
