(54) ДАТЧИК ПОЛОЖЕНИЯ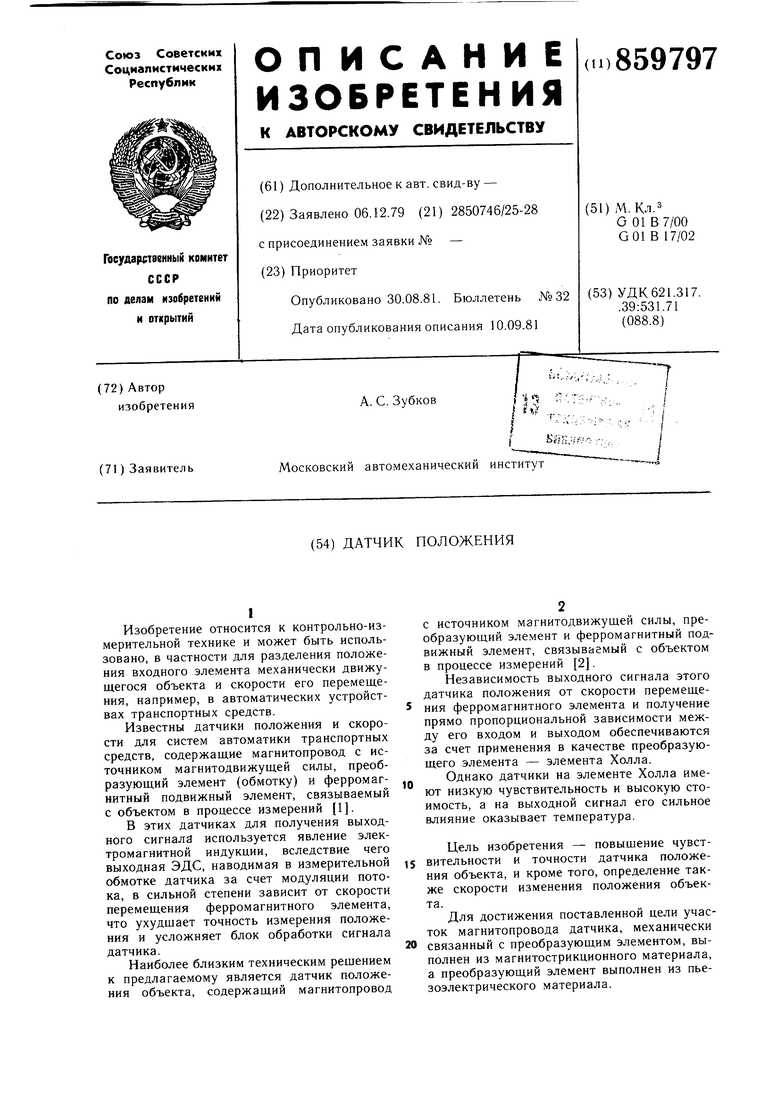

| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик положения и скорости | 1980 |
|
SU964535A2 |
| Датчик положения | 1980 |
|
SU976479A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОЙ МАГНИТНОЙ ПРОНИЦАЕМОСТИ ФЕРРОМАГНИТНЫХ ДЕТАЛЕЙ | 2015 |
|
RU2592727C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ МАГНИТОСТРИКЦИОННЫМ УРОВНЕМЕРОМ И МАГНИТОСТРИКЦИОННЫЙ УРОВНЕМЕР | 2003 |
|
RU2222786C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ ПО СЕТЯМ ЭЛЕКТРОПИТАНИЯ | 2020 |
|
RU2749963C1 |
| СПОСОБ РАЗМАГНИЧИВАНИЯ РЕЛЬСОВОГО ИЗОЛИРУЮЩЕГО СТЫКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2511738C2 |
| Способ калибровки ультразвуковых приборов | 1977 |
|
SU627325A1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ФАЗОМОМЕНТНЫХ ХАРАКТЕРИСТИК ВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 1997 |
|
RU2129709C1 |
| Способ контроля механических свойств металлопроката, изготовленного из ферромагнитных металлических сплавов и устройство для его осуществления | 2023 |
|
RU2807964C1 |
| Датчик угловых перемещений | 1985 |
|
SU1244487A1 |
1
Изобретение относится к контрольно-измерительной технике и может быть использовано, в частности для разделения положения входного элемента механически движущегося объекта и скорости его перемещения, например, в автоматических устройствах транспортных средств.
Известны датчики положения и скорости для систем автоматики транспортных средств, содержащие магнитопровод с источником магнитодвижущей силы, преобразующий элемент (обмотку) и ферромагнитный подвижный элемент, связываемый с объектом в процессе измерений 1.
В этих датчиках для получения выходного сигнала используется явление электромагнитной индукции, вследствие чего выходная ЭДС, наводимая в измерительной обмотке датчика за счет модуляции потока, в сильной степени зависит от скорости перемещения ферромагнитного элемента, что ухудщает точность измерения положения и усложняет блок обработки сигнала датчика.
Наиболее близким техническим решением к предлагаемому является датчик положения объекта, содержащий магнитопровод
С источником магнитодвижущей силы, преобразующий элемент и ферромагнитный подвижный элемент, связываемый с объектом в процессе измерений 2.
Независимость выходного сигнала этого датчика положения от скорости перемещения ферромагнитного элемента и получение прямо пропорциональной зависимости между его входом и выходом обеспечиваются за счет применения в качестве преобразующего элемента - элемента Холла.
Однако датчики на элементе Холла име10ют низкую чувствительность и высокую стоимость, а на выходной сигнал его сильное влияние оказывает температура.
Цель изобретения - повыщение чувствительности и точности датчика положе15ния объекта, и кроме того, определение также скорости изменения положения объекта.
Для достижения поставленной цели участок магнитопровода датчика, механически
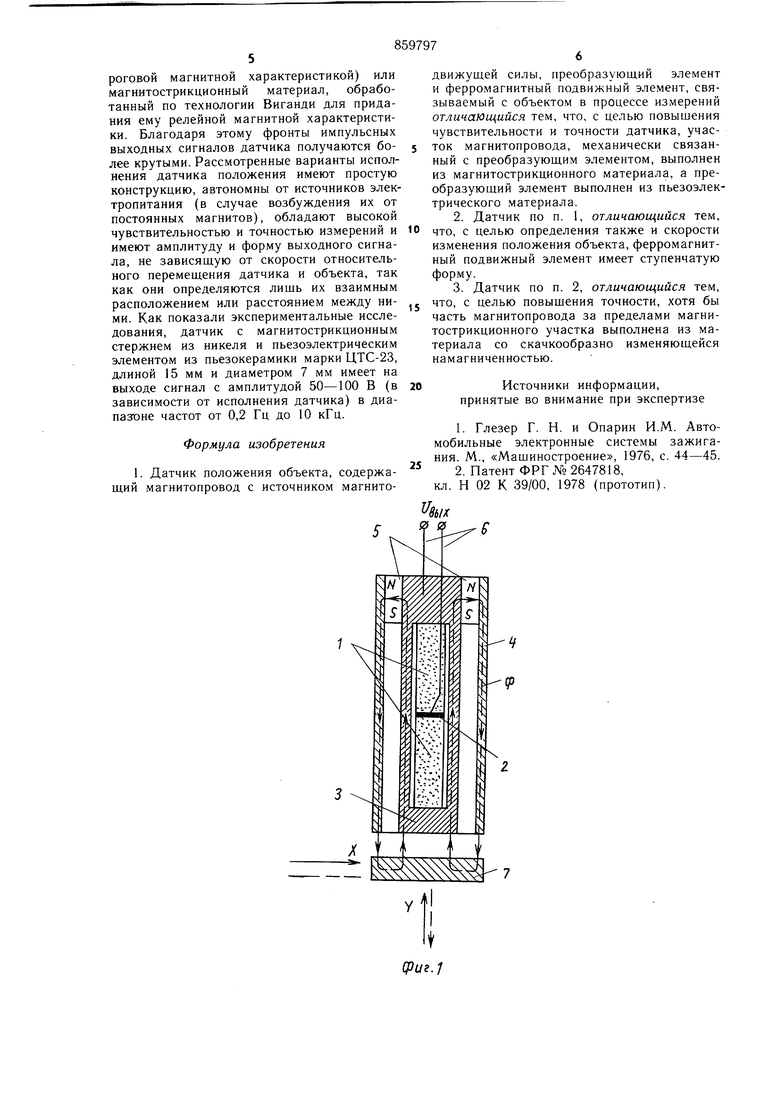
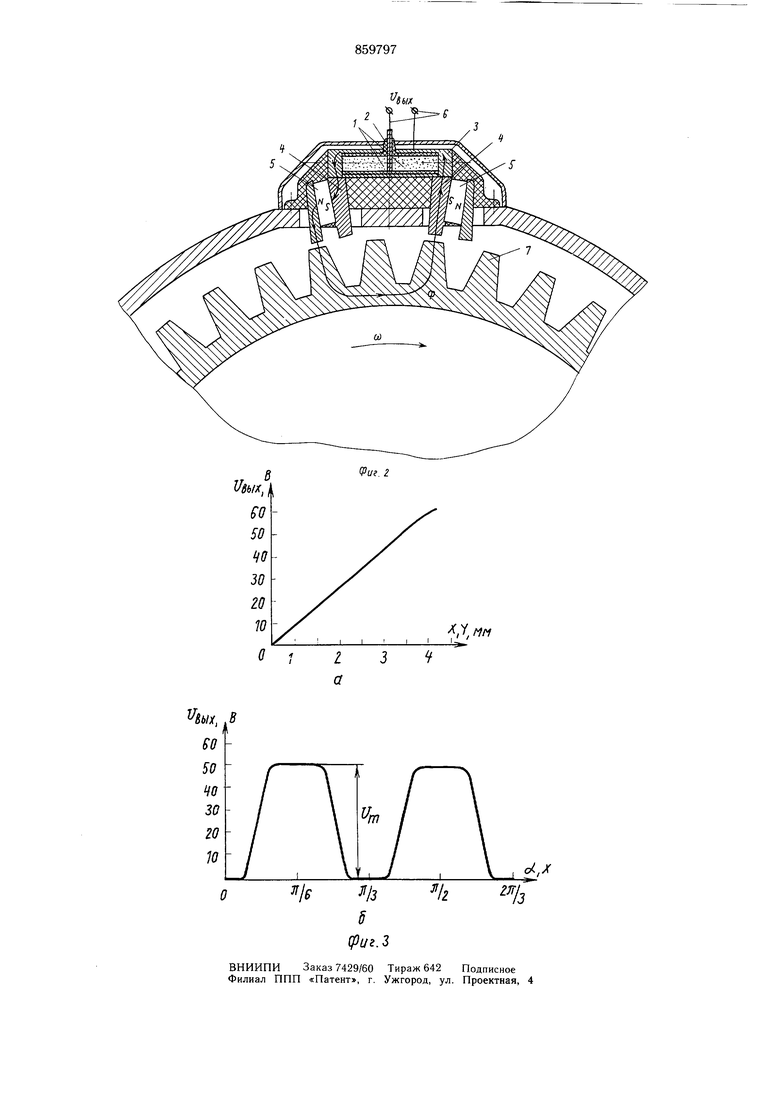
20 связанный с преобразующим элементом, выполнен из магнитострикционного материала, а преобразующий элемент выполнен из пьезоэлектрического материала. Ферромагнитный подвижный элемент имеет ступенчатую форму. Часть магнитопровода за пределами магнитострикционного участка выполнена из материала со скачкообразно изменяющейся намагниченностью. На фиг. 1 изображен датчик положения с возбуждением от постоянных магнитов, разрез; на фиг. 2 - датчик положения с ферромагнитным подвижным элементом ступенчатой формы, обеспечивающим определение также и скорости изменения положения объекта; на фиг. 3 - выходные характеристики датчика: а) выходная характеристика датчика при определении положения объекта, т. е. измерении расстояния до объекта; б) типичная форма выходного напряжения датчика в диапазоне частот от 0,2 Гц до 10 кГц, при определении скорости изменения положения объекта. Датчик положения содержит два пьезоэлемента 1 цилиндрической формы, соединенных торцами через прокладку 2 механически последовательно, а электрически- параллельно. Другими торцами пьезоэлементы 1 упираются в магнитострикционный участок 3, выполненный из материала с отрицательной магнитострикцией, например ИЗ никеля, магнитопровода 4. В магнитопровод 4 датчика включен источник 5 магнитодвижущей силы, например постоянный магнит, намагниченный в радиальном направлении. Он может иметь, например, кольцевую форму (фиг. 1) или форму призмы (фиг. 2). Хотя бы часть магнитопровода 4 за пределами магнитострикционного участка 3 может быть выполнена из материала со скачкообразной намагниченностью. Выходной сигнал датчика снимается с выводов 6, один из которых соединен с прокладкой 2,а другой с магнитострикционным участком 3.Ферромагнитный подвижный элемент 7, связываемый с контролируемым объектом в процессе измерений, обеспечивает модуляцию магнитного потока в магнитострикционным участке 3 магнитопровода. Элемент 7 может перемещаться в горизонтальном и вертикальном направлении относительно датчика положения, а при определении им скорости изменения положения объекта он должен иметь ступенчатую форму с чередующимися выступами и впадинами (фиг. 2) Датчик положения работает следующим образом. При определении положения движущегося объекта (расстояния до объекта), ферромагнитный элемент 7, связываемый с объектом измерений, движется относительно датчика в направлении оси Y или X. За счет изменения сопротивления магнитной цепи изменяется величина магнитного потока в магнитострикционном участке 3 магнитопровода 4. Это приводит к тому, что геометрические размеры магнитострикционного участка 3 изменяются. Таким образом. при сжатии механически связанных с этим участком пьозоэлементов 1 на их обкладках (торцах) наводится электрический заряд , обнаруживаемый как разность потенциалов на выводах 6 датчика. Величина этого заряда прямо пропорциональна перемещению элемента 7. По величине этого заряда и судят о положении контролируемого объекта относительно датчика. После уменьщения магнитного потока в участке 3 (при удалении ферромагнитного элемента 7) величина сигнала на выходе датчика снижается практически до нуля. Выходная характеристика датчика (фиг. За) линейная. При измерении скорости изменения положения объекта или частоты вращения вращающегося объекта ферромагнитный подвижный элемент 7 должен иметь ступенчатую форму и может быть выполнен, например в виде рейки или зубчатого колеса. По количеству импульсов на выходе датчика в единицу времени судят о скорости изменения положения объекта. В предложенном варианте (фиг. 2) исполнения датчика положения магнитное поле в магнитострикционном участке 3 обеспечено знакопеременным. Это связано с тем. что из-за потоков рассеяния и остаточной намагниченности магнитопровода 4 датчика, поле на его участке 3 не может уменьщиться до нуля при однополярном его намагничивании. Это приводит к уменьщению амплитуды переменной составляющей потока и, как следствие, к снижению уровня выходного напряжения датчика. Поскольку магнитострикционный эффект является четным эффектом, т. е. полярность выходного сигнала датчика на выходах 6 не меняется, то обеспечив знакопеременное поле на участке 3, можно, с одной стороны, увеличить уровень выходного сигнала (т. е. чувствительность) , а с другой - увеличить частоту выходного сигнала (т. е. точность измерений). Выходной сигнал датчика в этом случае импульсный (фиг. 36), амплитуда импульсов несет информацию о расстоянии до подвижного элемента 7 (величине зазора между ними), а частота - о скорости перемещения подвижного элемента. В ряде случаев в качестве источника магнитодвижущей силы могут быть использованы не постоянные магниты, а обмотка с током, которая в этом случае наматывается, например, на магнитострикционный участок 3 магнитопровода датчика. С целью повышения точности измерения скорости и расположения объекта в пространстве магнитопровод 4 датчика может быть выполнен хотя бы частично из материала со скачкообразно изменяющейся намагниченностью. Таким материалом может быть ферромагнетик с прямоугольной петлей гистерезиса элемент Виганда (материал с пороговой магнитной характеристикой) или магнитострикционный материал, обработанный по технологии Виганди для придания ему релейной магнитной характеристики. Благодаря этому фронты импульсных выходных сигналов датчика получаются более крутыми. Рассмотренные варианты исполнения датчика положения имеют простую конструкцию, автономны от источников электропитания (в случае возбуждения их от постоянных магнитов), обладают высокой чувствительностью и точностью измерений и имеют амплитуду и форму выходного сигнала, не зависящую от скорости относительного перемещения датчика и объекта, так как они определяются лищь их взаимным расположением или расстоянием между ними. Как показали экспериментальные исследования, датчик с магнитострикционным стержнем из никеля и пьезоэлектрическим элементом из пьезокерамики марки ЦТС-23, длиной 15 мм и диаметром 7 мм имеет на выходе сигнал с амплитудой 50-100 В (в зависимости от исполнения датчика) в диапазоне частот от 0,2 Гц до 10 кГц. Формула изобретения 1. Датчик положения объекта, содержащий магнитопровод с источником магнитодвижущей силы, преобразующий элемент и ферромагнитный подвижный элемент, связываемый с объектом в процессе измерений отличающийся тем, что, с целью повышения чувствительности и точности датчика, участок магнитопровода, механически связанный с преобразующим элементом, выполнен из магнитострикционного материала, а преобразующий элемент выполнен из пьезоэлектрического материала.
В
%
W/,
i I
fO 50 40 30 20 W
(Риг. 2
,yw
