(5) ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ ЖИДКОСТИ
Изобретение относится к машиностроению и может быть использовано в сиетемах управления.
В современных машинах широко применяются комбинированные системы управления , которые состоят из силового гидравлического контура и управляющего электрического. Для сопряжения этих контуров используются преобразо- Q ватели рода сигналов. К наиболее распространенным относятся преобразователи давления жидкости в перемещение, которое может непосредственнослужить входным сигналом устройств управления 5 либо преобразоваться в электрический сигнал с помощью различных элементов индикации.
Широко известны преобразователи дискретного действия реле давления. 20 Они содержат привод в виде золотника, поршня или диафрагмы и элемент индикации перемещения привода в виде электрических контактов L 1 1. В ПЕРЕМЕЩЕНИЕ
Однако такие преобразователи имеют большие габариты и недостаточную надежность, что обусловлено нaличиeN механического взаимодействия между приводом и элементом индикации, а также склонностью золотников и поршней к заклиниванию.
Надежность преобразователей повышается при использовании в приводе сильфонов.
Известное устройство содержит привод в виде сильфона, подключенного к источнику давления воздуха, рычаг, одно из плеч которого размещено против сильфона и механически связано с его жестким центром, BO3BpatHoe устройство в виде второго сильфона, связанное со вторым плечом рычага, и пневматический элемент индикации типа соплозаслонка, в котором заслонкой служит средняя часть рычага.
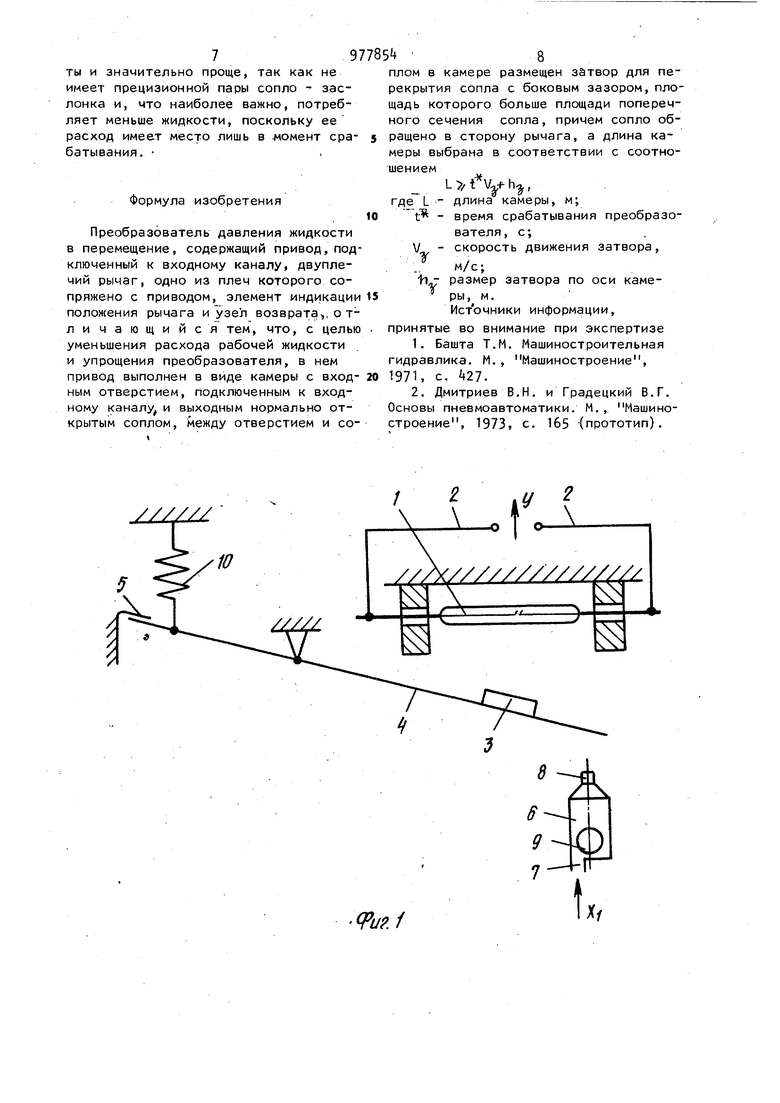
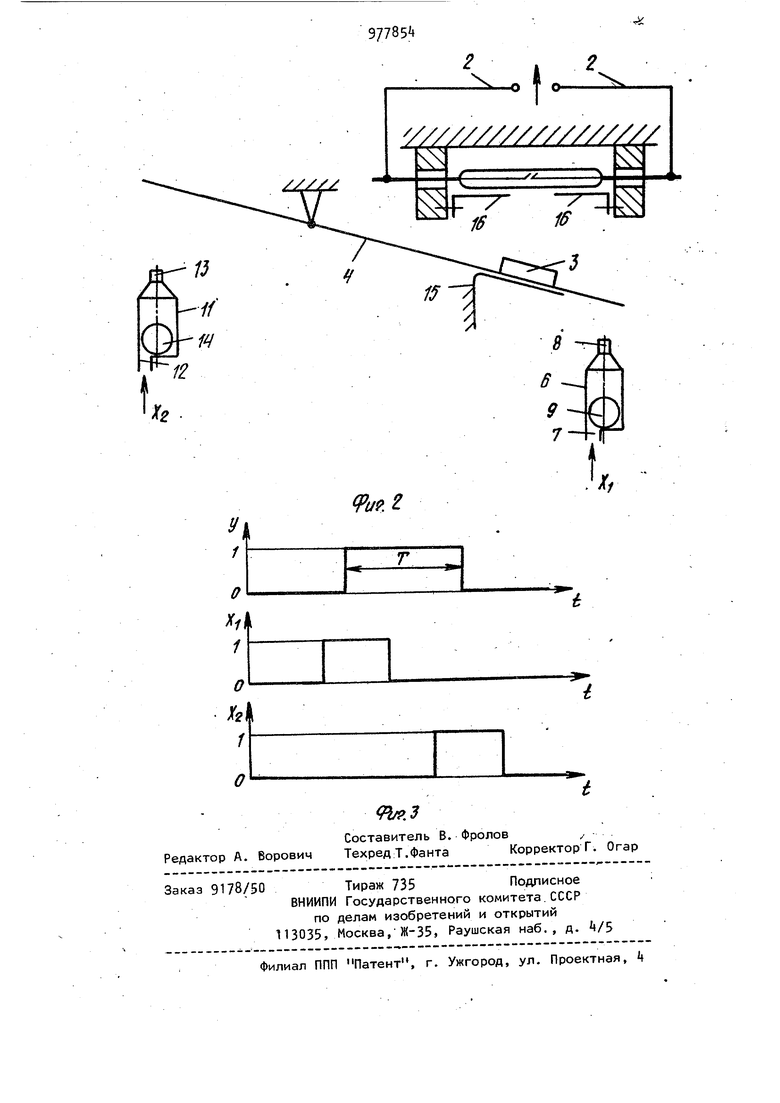
При подаче давления в первый сильфон рычаг перемещается в сторону сопла, что вызывает увеличение давления 3977 на выходе преобразователя. Второй сильфом также подключен к выходу для организации обратной связи по принципу компенсации перемещения. При этом преобразователь реализует.пропорциональный закон регулирования выходного давления Zj. Недостатками известного устройства являются нер|эерывный расход рабо--:--.. ..-, ,„ , чей среды, а также большие габариты, определяемые сильфонами привода и возвратного устройства. К другим недостаткам относятся технологическая сложность и трудоемкость, обусловленные / малой величиной рабочего хода рычага , (сотые доли миллиметра) и высокой точ;ностью изготовления пары сопло - за- слонка. Вследствие этого применение данного преобразователя для получения сигналов в дискретной форме нецелесообразно. Кроме того, здесь невозможно получение импульсных сигналов, что ограничивает функциональные возможн.ос ти. Цель изобретения - устранение указанных недостатков, а конкретно уменьшение расхода жидкости и упроще ние преобразователя. Поставленная цель, достигается тем что в известном преобразователе давления жидкости в перемещение, содержащем привод, подключенный к входному каналу, двуплечий рычаг, одно из плеч которого сопряжено с приводом, элемент индикации положения рычага и узел возврата, привод выполнен в виде камеры с входным отверстием, под ключенным квходному каналу, и выходным нормально открытым соплом, между отверстием, и соплом в камере размещен затвор для перекрытия сопла и с боковым зазором, площадь которого больше площади поперечного семения сопла, причем сопло обращено в сторо ну рцчага, а длина камеры выбрана в соответствии с соотношением ; ,, где L - длина камеры, м; t - время срабатывания преобразователя, с; М- - скорость движения затвора, м/с; h, - размер затвора по оси каме ры, м. На фиг. 1 показан предлагаемый пра образователь давления; на фиг. 2 - то же, вариант выполнения;.на фиг. 3 графики изменения входного и выходного сигналов преобразователя на фиг. 2 Преобразователь содержит элемент 1 индикации положения рымага любой из известных .конструкций, например, геркон, который в этом случае имеет выходные зажимы 2. Постоянный магнит 3 закреплен на двуплечем рычаге +, Ход рычага ограничен упором 5- Привод преобразователя выполнен в виде камеры 6 с входным отверстием 7 и выходным соплом 8, в которой помещен затвор 9- Преобразователь может быть размещен в кожухе с дренажным отверстием. Узел возврата выполнен в виде пружины 10. В качестве узла возврата вместо пружины 10 может использоваться дополнительная камера 11, аналогичная камере 6 и имеющая входное отверстие 12, выходное сопло 13 и затвор. 1. Для фиксации рычага в крайних положениях могут использоваться фиксаторы, например, в виде магнитных защелок 1Ь, первая из которых представляет собой ферромагнитный упор, а вторая - пару ферромагнитных .шторок. Входное отверстие 7 камеры 6 подключено к входному каналу X, а входное отверстие 12 камеры 11 - к каналу Xg возврата рычага в исходное положение.. Зазор между стенками камеры и затвором выполнен таким образом, что его площадь больше площади поперечного сечения сопла, а длина камеры выбрана в соответствии с соотношением L7/ h, где L - длина камеры, м; t - время срабатывания преобразователя, с; Vr.. - скорость движения затвора, м/с; h - размер затвора по оси каме ры, м. Преобразователь работает следующим образом. В исходном положении (фиг. 1) рычаг t с магнитом 3 упирается в упор 5, магнит 3 отведен от элемента 1, на зажимах 2 которого выходной сигнал у отсутствует (у 0). При подаче во входное отверстие 7 входного сигнала (X, 1) в виде давления жидкости последний проходит через боковой зазор между камерой 6 и затвором 9, поступает в выходное сопло 8 и истекает из последнего компактной струей в сторону свободного конца рычага k. Под действием кинетической энергии струи рычаг k прогибается вверх. Его пере- мещение служит выходным сигналом, который с помощью элемента 1 индикации и магнита 3 преобразуется в электрический. Магнит 3 приближается к элементу 1 индикации и.воздействует на него своим магнитным полем, которое любым из известных способов преобразуется в электрический сигнал, посту пающий на зажимы 2. Вытекающая из соп ла 8 жидкость отводится через дренаж ное отверстие. Одновременно затвор 9 в камере 6 увлекается потоком вверх в направле НИИ сопла 8 и перекрывает его. Время 1 движения затв(Ора 9 из крайнего ниж него в крайнее верхнее положение для конкретного давления и размеров каме ры 6 постоянно и является константой привода. По окончании времени t истечение струи из сопла 8 прекращается, рычаг с магнитом 3 отходит в исходное положение и выходной сигнал у ис чезает, несмотря на наличие входного сигнала X., При снятии давления из камеры 6 за твор Э опускается вниз в исходное положение под действием собственного веса. Постоянная времени при известной скорости затвора равна его ходу, деленному на скорость. С учетом этого нужная величина постоянной времени может быть обеспечена подбором длины камеры из следующего соотношения где L - длина камеры, м; у. скорость движения затвора 9, примерно равная скорости течения в камере 6, м/с; размер затвора 9 (в данном случае диаметр шарика), м; требуемая величина постоянной времени, с. Таким образом, камера 6 с затвором 9 работает подобно обратному клапану, у KdTOporo пробег затвора увеличен за счет длины камеры, и вследствие этого количество жидкости, вытекающей из сопла 8 за время срабатывания, дозируется в зависимости от требуемой величины t. В элементе индикации может быть использован геркон. Если же в преобразователе узел возврата выполнить в виде дополнительной камеры 11 с соплом 13 направленным в сторону левого плеча рычага k, и снабдить фиксаторами крайних положений, например в виде магнитных защело с, то он может работать как запоминающее устройство. В этом случае в исходном положении на фиг. 2 рычаг удерживается магнитом 3 который при.тягивается к ферромагнитному упору 15. При подаче импульсного управляющего сигнала в камеру 6 струя из сопла 8 преодолевает силу притяжения магнита 3 к упору 15 и перемещает рычаг 4 вверх, как описано выше. Магнит 3 за.: мыкаеттеркон и :вместе с рычагом k I удерживается в верхнем положении за счет силы притяжения к ферромагнитным шторкам 1б. Геркон остается замкнутым (у 1) и после снятия сигнала X , т. е. устройство запоминает значение X,. Для стирания записи нужно подать сигнал X-2. во входное отверстие 12 дополнительной камеЕ)ы 11 и струя из сопла 13 отведет рычаг 4 в исходное положение, Графики изменения входных сигналов Х и и выходного у для этого случая соответствуют фиг. 3Помимо описанных возможны и другие варианты преобразователя. Очевидно, например, что затворы 9 и И могут иметь другую форму - плоскую, коническую и т. д., а также могут быТь подпружинены относительно камер. В последнем случае камеры могут быть ориентированы в пространстве произвольно. Подвеска магнита 3 также может быть иной и обеспечивать, например, поступательное движение его относительно оси геркона, а не вращательное. Сам магнит можно устанавливать неподвижно и изменять магнитный поток через .элемент индикации с помощ ью феррома нитного шунта, связанного с рычагом . Чувствительным элементом при этом может служить трансформатор, конденсатор и др. . Описанное устройство может использоваться для сопряжения гидравлических систем с электрическими, например для подсчета числа ходов исполнительных гидроцилиндров с помощью электрических счетчиков и т. д. Его преимуществом перед известными конечными выключателями в данном примере является бесконтактный способ счета, поскольку связь между гидравлической и электрической частью осуществляется только через струю жидкости. В то же время оно экономичнее подобных струйных устройств, для которых необходим непрерывный расход рабочей среды. По сравнению с прототипом предлагаемый преобразователь имеет меньшие габари-.
ты и значительно проще, так как не имеет прецизионной пары сопло - заслонка и, что наиболее важно, потребляет меньше жидкости, поскольку ее расход имеет место лишь в .момент срабатывания. Формула изобретения Преобразователь давления жидкости в перемещение, содержащий привод, под ключенный к входному каналу, двуплечий рычаг, одно из плеч которого сопряжено с приводом, элемент индикации положения рычага и узел возврата,, о тличающийся тем что, с целью уменьшения расхода рабочей жидкости и упрощения преобразователя, в нем привод выполнен в виде камеры с входным отверстием, подключенным к входному каналу, и выходным нормально открытым соплом, между отверстием и со377QSI 8
плом в камере размещен затвор для перекрытия сопла с боковым зазором, площадь которого больше площади поперечного сечения сопла, причем сопло обращено в сторону рычага, а длина камеры выбрана в соответствии с соотношением, где L - длина камеры, t - время срабатывания преобразователя , с; скорость движения затвора, м/с; размер затвора по оси камеры, м. Источники информации, ринятые во внимание при экспертизе 1.Башта Т.М. Машиностроительная идравлика. М., Машиностроение, 971, с. 27, 2.Дмитриев В.Н. и Градецкий В,Г. сновы пневмоавтоматики. М., Машинотроение, 1973, с. 165 -(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Реле давления | 1980 |
|
SU957307A1 |
| Датчик угловой скорости | 1979 |
|
SU928231A1 |
| Устройство для контроля состояния полупроницаемого разделительного элемента | 1987 |
|
SU1735730A1 |
| Устройство для регулирования температуры | 1983 |
|
SU1315959A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РАСХОДА | 2004 |
|
RU2267148C2 |
| Устройство для контроля целостности мембраны | 1985 |
|
SU1280361A1 |
| Реле протока жидкости | 1985 |
|
SU1379823A1 |
| Измеритель уровня двух несмешивающихся жидкостей | 1973 |
|
SU494613A1 |
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) СЛЕДЯЩИЙ ПРИВОД, СТРУЙНЫЙ ДВИГАТЕЛЬ, РАСПРЕДЕЛИТЕЛЬ И БЛОК КОНЕЧНЫХ ВЫКЛЮЧАТЕЛЕЙ | 1995 |
|
RU2093715C1 |
| Узел привода заслонки струйного регулятора давления | 1981 |
|
SU964590A1 |
////// (Ри. 1
ay.2.
