Изобретение относится к измерению параметров движения и может быть использовано для измерения скорости вращения преимущественно машин, снаб женных системами принудительной смаз ки, например в автомобильной технике В настоящее время для измерения скоростей вращения широко используют ся датчики скорости с различного рода источниками тока tl, например, пневматические 2 и гидравлические. Наиболее близким к предлагаемому по технической сущности и решаемым задачам является гидравлический датчик скорости, который содержит статор, ротор с отверстиями, расположен ными соосно с отверстиями статора, и струйный элемент, вход которого соединен с источником давления недостаткам известного устройст ва следует отнести малую точность и чувствительность в нижней зоне рабочего диапазона измеряемых скоростей. Цель изобретения - повышение точности измерения низких скоростей и чувствительности. Поставленная цель достигается тем, что ротор выполнен в виде.полого плоского диска, внутренняя полость которого сообщается с системой смазки , на образующей поверхности диска расположено одно или несколько сопл, а чувствительный элемент выполнен в виде упругой пластины, на которой закреплен постоянный магнит. На фиг, 1 дана конструкция датчика; на фиг. 2 - то же, вариант выполнения; на фиг. 3 - вид А на фиг.1; на фиг. - графики выходного сигнала датчика. Датчик состоит из ротора 1 с заполненной жидкостью кольцевой полостью, посредством ступицы 2 закрепленного на контролируемом валу 3, и чувствительного элемента в виде неподвижного геркона и постоянного магнита 5, установленного на подпружи392
ненном поворотном рычаге 6 с осью поворота 7. В наружной цилиндрической стенке ротора 1 имеются сопла 8 по числу импульсов выходного сигнала на один оборот контролируемого вала 3. Ножки геркона подключены к выходным клеммам датчика (на фиг. 1 не показаны),
Для использования в датчике отработанной смазочной жидкости, поступающей, например, к контролируемому валу 3, ротор 1 может устанавливаться вблизи опорного подшипника 9 вала 3, смазка которого осуществляется через форсунку 10, сообщенную с системой принудительной смазки (не показана) каналом 11, Направление движения смазочной жидкости в полост ротора 1 через зазоры между телами качения подшипника показано стрелкой Б.
Ротор 1 имеет разгрузочное отверстие 12, ограничивающее уровень жидкости в нем, для исключения ее сброса через правый борт, приводящего к ложным срабатывания геркона .
Для исключения ложных срабатываНИИ под действием брызг жидкости, отбрасываемых соседними деталями, между герконом k и ротором 1 может дополнительно устанавливаться экран 13 с прорезью для прохода струи 1 к рычагу 6.
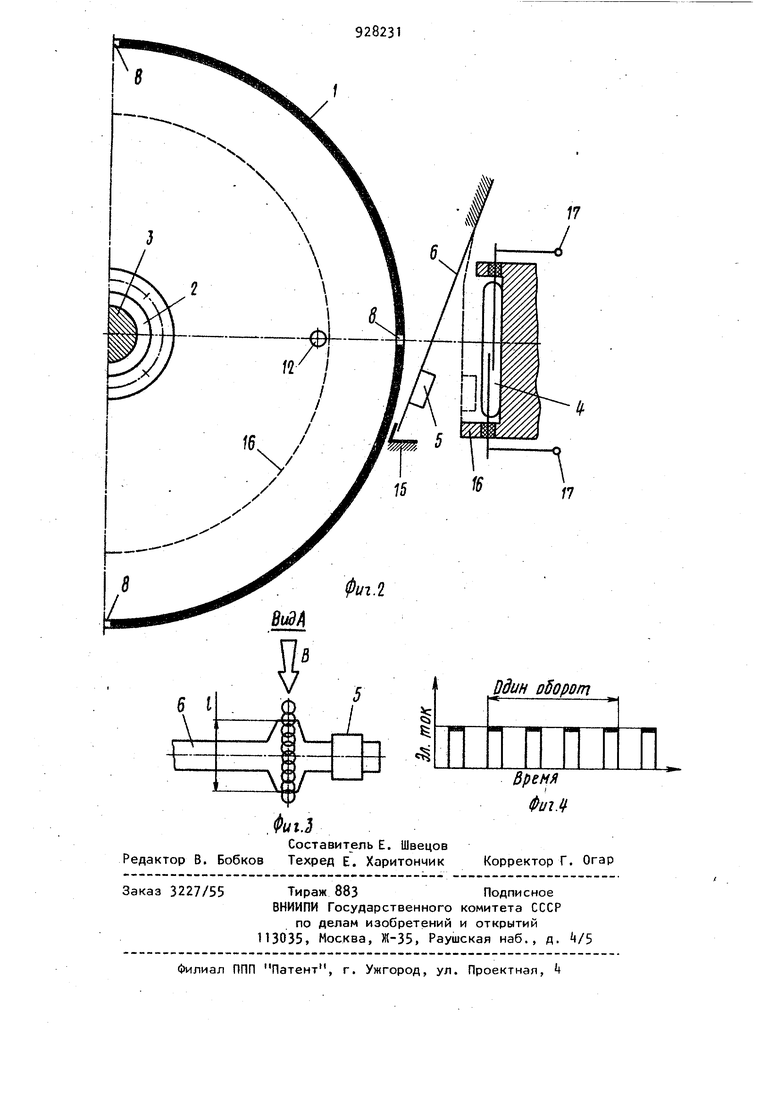
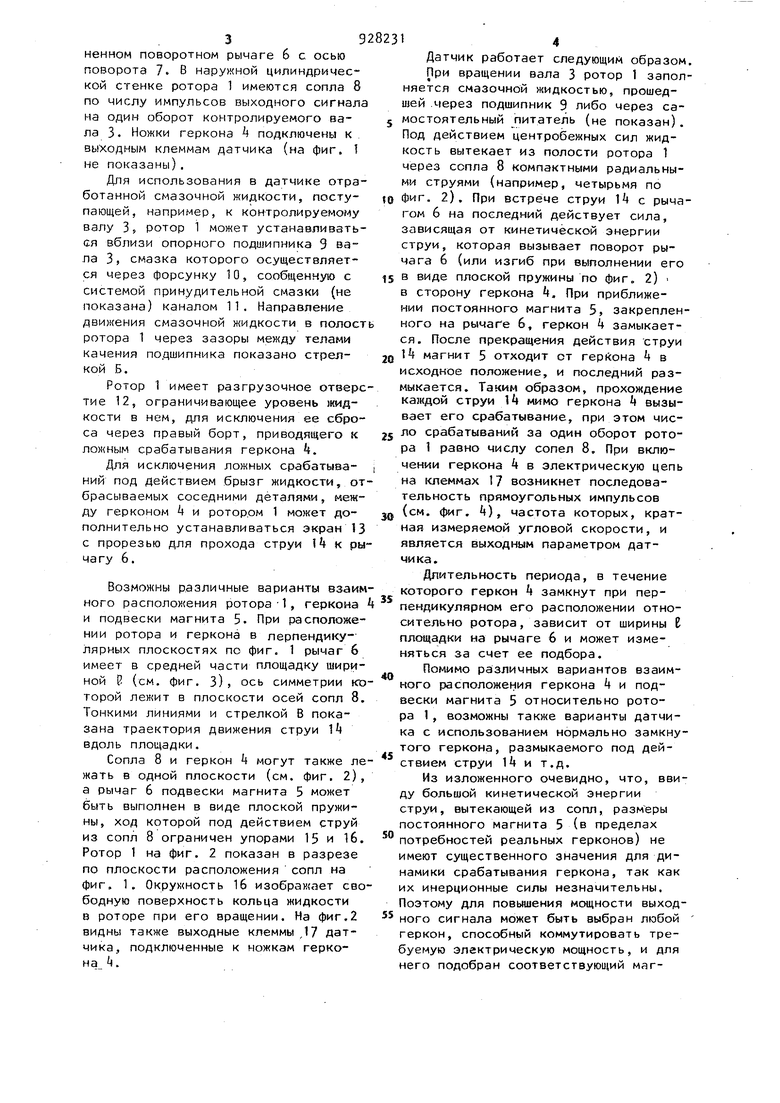
Возможны различные варианты взаимного расположения ротора 1, геркона и подвески магнита 5. При расположении ротора и геркона в перпендикулярных плоскостях по фиг. 1 рычаг 6 имеет в средней части площадку шириной В (см., фиг. 3), ось симметрии которой лежит в плоскости осей сопл 8. Тонкими линиями и стрелкой В показана траектория движения струи 1 вдоль площадки.
Сопла 8 и геркон k могут также лежать в одной плоскости (см. фиг. 2), а рычаг 6 подвески магнита 5 может быть выполнен в виде плоской пружины, ход которой под действием струй из сопл 8 ограничен упорами 15 и 16. Ротор 1 на фиг. 2 показан в разрезе по плоскости расположения сопл на фиг. 1. Окрух(ность 16 изображает свободную поверхность кольца жидкости в роторе при его вращении. На фиг.2 видны также выходные клеммы,17 датчика, подключенные к ножкам геркона .
14
Датчик работает следующим образом
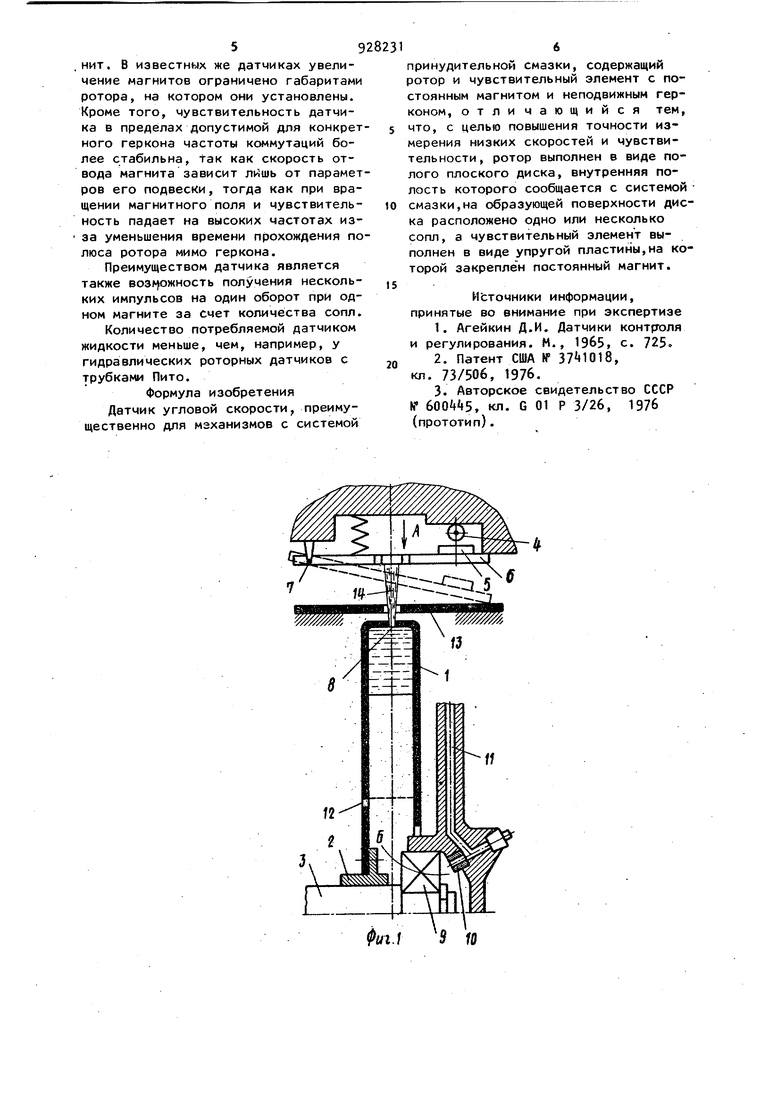
При вращении вала 3 ротор 1 заполняется смазочной жидкостью, прошедшей .через подшипник 9 либо через самостоятельный питатель (не показан). Под действием центробежных сил жидкость вытекает из полости ротора 1 через сопла 8 компактными радиальными струями (например, четырьмя по фиг. 2). При встрече струи 14 с рычагом 6 на последний действует сила, зависящая от кинетической энергии струи, которая вызывает поворот рычага 6 (или изгиб при выполнении его в виде плоской пружины по фиг, 2) в сторону геркона 4. При приближении постоянного магнита 5, закрепленного на рычаге 6, геркон 4 замыкается. После прекращения действия струи 14 магнит 5 отходит от геркона 4 в исходное положение, и последний размыкается. Таким образом, прохождение каждой струи 14 мимо геркона 4 вызывает его срабатывание, при этом число срабатываний за один оборот ротора 1 равно числу сопел 8, При включении геркона 4 в электрическую цепь на клеммах I7 возникнет последовательность прямоугольных импульсов (см. фиг. 4), частота которых, кратная измеряемой угловой скорости, и является выходным параметром датчика.
Длительность периода, в течение которого геркон 4 замкнут при перпендикулярном его расположении относительно ротора, зависит от ширины Е площадки на рычаге 6 и может изменяться за счет ее подбора.
Помимо различных вариантов взаимного расположения геркона 4 и подвески магнита 5 относительно ротора 1, возможны также варианты датчика с использованием нормально замкнутого геркона, размыкаемого под действием струи 14 и т.д.
Из изложенного очевидно, что, ввиду большой кинетической энергии струи, вытекающей из сопл, постоянного магнита 5 (в пределах потребностей реальных герконов) не имеют существенного значения для динамики срабатывания геркона, так как их инерционные силы незначительны. Поэтому для повышения мощности выходного сигнала может быть выбран любой геркон, способный коммутировать требуемую электрическую мощность, и для него подобран соответствующий маг59 , нит. в известных же датчиках увеличение магнитов ограничено габаритами ротора, на котором они установлены. Кроме того, чувствительность датчика в пределах допустимой для конкрет ного геркона частоты коммутаций более стабильна, taK как скорость отвода магнита зависит лишь от парамет ров его подвески, тогда как при вращении магнитного поля и чувствительность падает на высоких частотах изза уменьшения времени прохождения по люса ротора мимо геркона. Преимуществом датчика является также вoз JOжнocть получения нескольких импульсов на один оборот при одном магните за счет количества сопл. Количество потребляемой датчиком жидкости меньше, чем, например, у гидравлических роторных датчиков с трубками Пито. Формула изобретения Датчик угловой скорости, преимущественно для механизмов с системой принудительной смазки, содержащий ротор и чувствительный элемент с постоянным магнитом и неподвижным герконом, отли чающийся тем, что, с целью повышения точности измерения низких скоростей и чувствительности, ротор выполнен в виде полого плоского диска, внутренняя полость которого сообщается с системой смазки,на образующей поверхности диска расположено одно или несколько сопл, а чувствительный элемент выполнен в виде упругой пластины,на которой закреплён постоянный магнит. Источники информации, принятые во внимание при экспертизе 1.Агейкин Д.И. Датчики контроля и регулирования. М., 19б5, с. 725. 2.Патент США № STtlOlS, кл. 73/506, 1976. 3.Авторское свидетельство СССР К , кл. G 01 Р 3/26, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для смазки гребней колес рельсового транспортного средства | 1990 |
|
SU1791235A1 |
| Преобразователь давления жидкости в перемещение | 1980 |
|
SU977854A1 |
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) СЛЕДЯЩИЙ ПРИВОД, СТРУЙНЫЙ ДВИГАТЕЛЬ, РАСПРЕДЕЛИТЕЛЬ И БЛОК КОНЕЧНЫХ ВЫКЛЮЧАТЕЛЕЙ | 1995 |
|
RU2093715C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РОТОРНЫХ МЕХАНИЗМОВ | 2007 |
|
RU2434133C2 |
| Реле давления | 1980 |
|
SU957307A1 |
| ДАТЧИК ПОЛОЖЕНИЯ ОБОРУДОВАНИЯ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2331571C1 |
| ДАТЧИК ДЛЯ КОНТРОЛЯ УРОВНЯ ЖИДКОСТИ | 2007 |
|
RU2340878C1 |
| МОБИЛЬНАЯ КАРОТАЖНАЯ ЛЕБЕДКА | 2000 |
|
RU2191741C2 |
| Индуктивный датчик тахометрического счетчика жидкости | 2016 |
|
RU2625539C1 |
| Устройство для аварийного контроля скорости | 1977 |
|
SU684444A1 |