(54) ИСКАТЕЛЬ ИМПЕДАНСНОГО ДЕФЕКТОСКОПА
| название | год | авторы | номер документа |
|---|---|---|---|
| АКУСТИЧЕСКИЙ ИМПЕДАНСНЫЙ СПОСОБ КОНТРОЛЯ КАЧЕСТВА ПАЯНЫХ И КЛЕЕВЫХ СОЕДИНЕНИЙ ОБШИВКИ С ТОРЦАМИ СОТ В ОДНОСТОРОННИХ СОТОВЫХ КОНСТРУКЦИЯХ | 1992 |
|
RU2069362C1 |
| СПОСОБ ИМПЕДАНСНОЙ ДЕФЕКТОСКОПИИ ДВУХСЛОЙНЫХИЗДЕЛИЙ | 1970 |
|
SU261760A1 |
| Преобразователь импедансного дефектоскопа | 1980 |
|
SU868571A1 |
| Акустический импедансный преобразователь | 1985 |
|
SU1252725A1 |
| Импедансный способ дефектоскопии изделий | 1984 |
|
SU1226296A1 |
| Акустический импедансный преобразователь | 1989 |
|
SU1629838A1 |
| Регулируемый совмещённый преобразователь импедансного дефектоскопа | 2017 |
|
RU2671334C1 |
| Датчик импедансного дефектоскопа | 1975 |
|
SU597961A2 |
| Устройство для акустического импедансного контроля изделий | 1991 |
|
SU1797046A1 |
| УСТРОЙСТВО ДЛЯ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ КАЧЕСТВА ОБОЛОЧЕК, ИМЕЮЩИХ ФОРМУ ТЕЛ ВРАЩЕНИЯ, И НАКЛАДНОЙ ИМИТАТОР ДЕФЕКТОВ | 2007 |
|
RU2334226C1 |
Изобретение относится к неразруmasasiSMy контролю и может быть испояь зовано при ультразвуковой дефектоскопии слоистых изделий.
По основному авт. св. СССР 712755 известен искатель импвдаисного дефектоскопа, содержагдай звуковод с излучающим пьезоэлементом и два п етеъшых пьезоэлсмента с наконечникгиет, электрически соединённые встречно-параллельно, отражатель, paз 4eщeнный с одной стороны излучаницего пьеэоэлемента, приемные пьезоэлементы устаиоэлены на противоположной стороне звуковода с возможностыо перемеэцения в плоскости измерения, а расстояние между осями приекшых пьезоэлементов выбрано кратным расстоянию между микронеровностями контролируетлой поверхности 1 .
Недостатком этого искателя является то, что при сканировании им с i высокой скоростью в режиме автоматизированного контроля возникают ложные сигналы, связанные с неоддаородной шероховатостью поверхности контролируемого изделия, что снижает надежность конт{ оля.
Цель изобретения - повышение надежности при контроле изделий с
неоднородной шероховатостью поверхности изделия.I
Цаль достигается тем, что искатель импеданского дефектоскопа снабжен двумя размещенными между приемными пьезоэлвментами и включенными йстречно-параплельно компенсационными пьезоэлементами с наконечниками и инерционны в1 массами, упругими
10 элементаьш, консольно закреплякнцими компенсгщиоиные пьезоэлементы на звукоаоде, причем продольные оси упругих элементов параллельны плоскости расположения поиемных пьезоэле15ментов.
.Кроме того, закрепление упругих элементов на звуководе осуществляется через прокладаси из пористого материала.
Ш
Радиус кривизны наконечников компенсационных пьезоэлементов равея кривизны наконечников щ иемных пьезоэлементов..
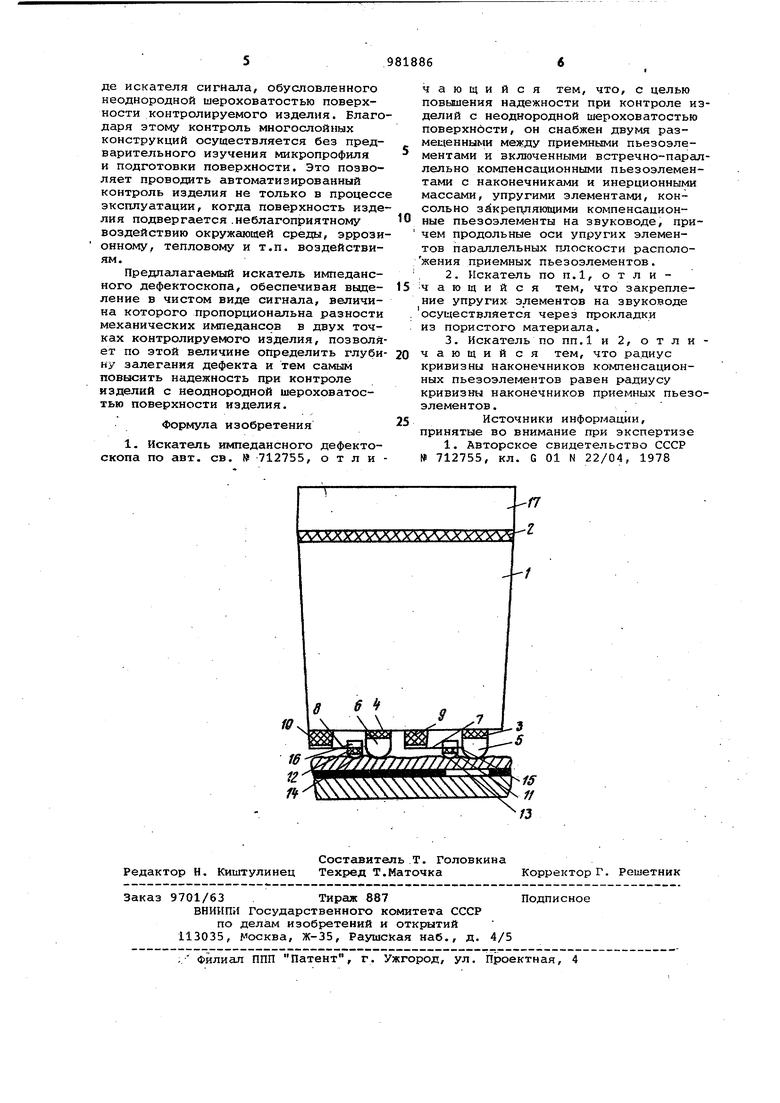
На чертеже представлена схема
25 реализации искателя импедансного дефектоскйпа.
Искатель содержит звуковод 1 с излучающим пьезоэлементом 2, два приемных пьезоэлемента 3 и 4 с наконеч30никами 5 и 6 электрически соединенные встречно-параллельно, два упругих элемента 7 и 8, соединенные со звуководом через прокладки 9 и 10 из пористого материала, два компенсационных пьезоэлемента 11 и 12 с наконечниками 14 и 13 и инерционным массами 15 и 16 электрически соединенные встерчно-параллельно и разме щенные между приемными, пьезоэлементами 3 и 4, отражатель 17, размещен ный с противоположной стороны излучающего пьезоэлемента. Искатель работает следующим образом. Излучающий пьезоэлемент 2 возбуж дает в звуководе 1 продольные колебания, которые передаются через наконечники 5 и 6 в контролируемое изделие. Искателем сканируют по поверхнос ти контролируемого изделия. Силы ре акции изделия генерируют в приемных и компенсационных пьезоэлементах соотвественно 3,4 и 11, 12 заряд. Причем величина заряда, генерируемого в приемных пьезоэлементах, про порциональная величине механического импеданса в данной точке изделия, а в компенсационных пьезоэлементах - нет, и определяется лишь упругими силами элементов 7 и 8 и силами тяжести наконечников 13 и 14 пьезоэлементов 11 и 12 и инерционны масс 15 и 16, суммарная величина ко торых выбирается меньше величины минимальной силы прижатия, при кото рой происходит обнаружение дефекта. Таким образом, при согласовании механических и электрических характеристик каждой пары пьезоэлементов суммарный электрический заряд, гене рируемый силами реакции изделия, сн маемый с компенсационных пьезоэлементов всегда равен нулю, а с приемных - пропорционаленразности механических импедансов в контролируемых точках изделия. Кроме сил реакции изделия в при емных и компенсационных пьезоэлемен тах генерируют заряд силы инерции масс, вовлеченных в колебание в результате движения искателя по микро неровностям поверхности контролируе мого изделия. Величина этого заряда зависит от массы колеблющихся элементов, от степени шероховатости поверхности. Таким образом, при соответствующ согласовании электрических характеристик каждой пары пьезоэлементов, приемных и компенсационных, суммарный электрический заряд, генерируемый силами инерции масс, вовлеченных в .колебание в результате движения искателя по микронеровностям поверхности и снимаемый с каждой этой пары при данной скорости контроля, определяется только различием, степелги шероховатости с окрестности двух контролируегльтх точек . поверхности . Полный сигнал пьезоэлементов 11 и 12 вычитается из полного сигнала, поступающего с пьезоэлементов 3 и 4, и результирующее напряжение фиксируется дефектоскопом (не показан)Поскольку сигналы с этих пьезоэлементой сдвинуты по времени на величину,- пропорциональную расстоянию между ними и обратно пропорциональную скорости контроля, то полный сигнал с компенсационных пьезоэлементов прежде проходит согласующее устройство и линию задержки (не показаны). Напряжение результирующего сигнала, образом, пропорциональна только разности механических импедансов в двух точках контроля, замеряемых приемными пьезоэлементами, и не зависит от неоднородной шероховатости поверхности контролируемого изделия: пьезоэлементы 11 и 12 полностью компенсируют эту составляюшуи сигнала пьезоэлементов 3 и 4, При отсутствии дефектов силы реак . ции изделия генерируют в соединенных . встречно-параллельно пьезоэлементах 3 и 4 одинаковые по величине заряда, в результате чего эта составляющая напряжения, снимаемая с них- равна нулю. Результирующее напряжение, фиксируемое дефектоскопом, следовательно, также равно нулю. Когда наконечник 6 проходит над дефектом, в приемном пьезоэлементе 4 генерируется меньишй заряд, а на выходе С приемных пьезоэлементов появляется некомленсированная составляю- . щая напряжения, которая и фиксируется дефектоскопом. При этом будет установлена граница дефекта. Вторая граница дефекта устанавливается или в момент, когда результирующее напряжение вновь равно нулю, в случае длины дефекта ме1-;ьшей расстояния между наконечникаьги 5 и 6, или в момент из - енения знака результирующего напряжения, в случае длины дефекта равной или большей расстояния между наконечниками 5 и 6. Критерием выбора соответствующего решения о местонахождении второй границы служит время длительности первого сигнала при данной скорости контроля: если это время меньше времени, необходимого для прохождения пути, равного расстояния между наконечниками 5 и 6, то границу дефекта определяют первым способом, в противном случае - вторым. Конструкция предлагаемого искателя позволяет существенно повысить скорость сканирования при контроле, так как исключает появление на выхо
