(54) СИСТЕМА СЛЕЖЕНИЯ ГЕЛИОСТАТОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система гелиостатов | 1979 |
|
SU983395A1 |
| Гелиостат | 1980 |
|
SU1126777A1 |
| ПОВОРОТНОЕ УСТРОЙСТВО ДЛЯ СОЛНЕЧНОГО ЭНЕРГОМОДУЛЯ | 2007 |
|
RU2381426C2 |
| Устройство для слежения гелиоустановки за Солнцем | 1989 |
|
SU1728596A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| РЕГУЛЯТОР МАССОВОГО РАСХОДА ВОЗДУХА | 2019 |
|
RU2722253C1 |
| Гелиокомплекс | 1983 |
|
SU1141274A1 |
| ТРОЛЛЕЙБУС С ЧАСТИЧНОЙ НЕЗАВИСИМОСТЬЮ ОТ КОНТАКТНОЙ СЕТИ | 2012 |
|
RU2493027C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ УДАРНОГО БУРЕНИЯ СКВАЖИН | 2021 |
|
RU2766989C1 |
1
Изобретение относится к гелиотехнике, в частности к системам ориентирования поля гелиостатов для солнечной электростанции.
Известна система длежеиия гелиостатов, содержащая блоки поворота, кинематически связанные с выходным звеном электропривода и каркасами гелиостатов. В этой системе гелиостаты объединены в группы на общем валу, т.е. движение в каждой плоскости слежеиия осуществляется одним приводом с длинным валом по сигналу своего датчика или по заданной программе 1.
Для .обеспечения необходимой точности слежения привод снабжается редуктором с передаточным отношением до 2-10, а индивидуальная корректировка каждого гелиостата группы возможна лишь при использоваЙии нелинейной кинематики блока поворота. Кроме того, двухплоскостная монтировка гелиостата требует установки двух приводов, кинематическая связь которых с группами гелиостатов различна.
Целью изобретения является упрощение конструкции системы.
Поставленная цель достигается тем, что каждый блок поворота вьшолнен в виде редуктора с двумя входными валами, кинематическая связь блока поворота с выходным звеном электропривода вьшолнена в виде двух элект5 ромагнитных муфт сцепления и двух роликов, установленных на входных валах редуктора, а выходное звено электропривода - в виде бесконечного троса, охватьшающего каждый ролик, причем ролики блока расположеньг на
О противоположных сторонах троса.
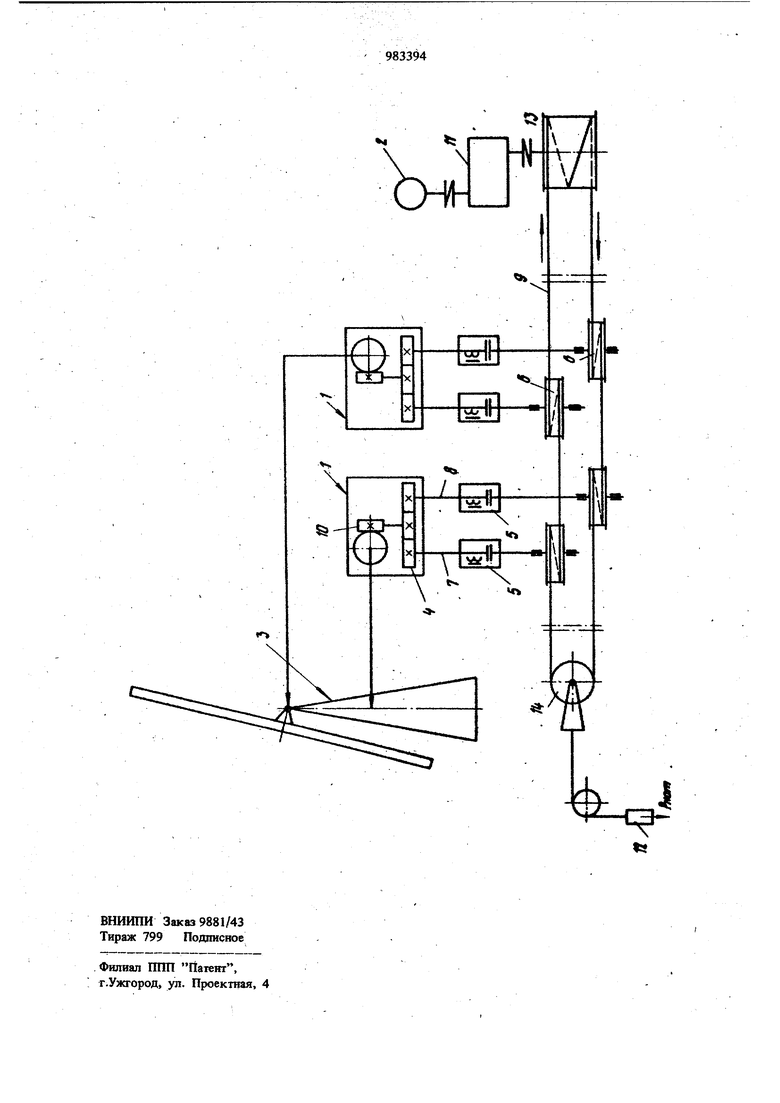
На чертеже представлена кинематическая схема системы слежения гелиостатов.
Система содержит блоки 1 поворота, кинематически связанные с выходным звеном
5 электропривода 2 и каркасами гелиостатов 3. Каждый блок 1 поворота вьшолнен в виде редуктора 4 с двумя входными валами, кинематическая связь блока I поворота с выходным звеном электропривода 2 вьшолнена
20 в виде двух электромагнитных муфт 5 сцепления и двух роликов 6, установленных на . входных валах 7 и 8 редуктора 4, а выходное звено электропривода 2 выполнено в 398 виде бесконечного троса 9, охватьгаающего каждый ролик 6, причем ролики 6 блока I поворота расположены на противоположных cTqpoHax троса 9. Выходной вал редуктора 4 блока 1 поворота кинематически связан с каркасом гелиостата 3 с помощью червячной пары 10. Кроме того, система снабжена редуктором 11, через который электропривод 2 соединен с тросом 9, натянутым с помощью груза 12 на ведущем барабане 13 и поворотном барабане 14. Система работает следующим образом. Электропривод 2 непрерывно через -редуктор 11 вращает ведущий барабан 13 и вместе с ним трос 9 с роликами 6 блоков 1 поворота в KaHaj x азимутального и зенитального слежения, кинематические схемы ко торых выполнены одинаковыми. В соответствии с программой происходит включение электромагнитных муфт 5 сцепления в каж дом канале и, следовательно, передача движения электропривода 2 на каркасы гелиостатов 3. Выполнение блока 1 поворота в виде самостоятельного редуктора 4 позволяет разделить передаточное отнощение кинематической связи электропривода 2 гелиостата 3 между последним и общим редуктором 11. Редуктор 4 обеспечивает рюверс движения гелиостата 3, а снабжение каждого гелиостата 3 электромагнитными муфтами 5 сцепления в обоих каналах слежения позволяет управлять гелиостатами индивидуально при общем и единственном электроприводе 2, что, в свою очередь, упрощает конструкцию системы, повыщает ее точность и эффективность. Формула изобретения Система слежения, гелиостатов, содержащая блоки поворота, кинематически связанные с выходным звеном электропривода и каркасами гелиостатов, отличающаяся тем, что, с целью упрощения конструкции, каждый блок поворота вьшолнен в виде редуктора с двумя входными валами, кинематическая связь блока поворота с выходным звеном электропривода - в виде двух электромагнитных муфт сцепления и двух роликов, установленных на входных валах редуктора, а выходное звено электропривода в виде бесконечного троса, охватывающего каждый ролик, причем ролики блока расположены на противоположных сторонах троса. Источники информации, принятые во внимание при экспертизе 1. Fucuda К. А Study on the So Jar Tower Power System. Qollod. int. elec. Solaire, Toulouse, 1976, Toulouse, 1976, p. 681-695.
