1 .,
Изобретение относится к гелиотехнике и может быть использовано в гeлиoyctaнoвкax, требующих высокой точности слежения, например для ведущего гелиостата при групповом управлении множеством ведомых гелиостатов, работающих в составе высокотемпературных и мощных солнечных печей.
Известна следящая система с замкнутым контуром, содержащая два измерительных устройству, которые . включены в цепь, соответственно, до и после места входа возмущений, сно сиМ)1х люфтом или упругостью частей системы. Указанные устройства измеряют параметр, характеризующий люфт или упругость и пepeдaюf на исполнительный двигатель корректирующий сигнал, который компенсирует Э(1)фекты люфта или упругости 1 .
Однако в случае применения для гелиостата данного устройства в качестве следящей системы непрерывноГО действия динамические ошибки еле жения не могут быть значительно уменьшены. Действие обратных связей, предусмотренных в этой следящей системе, не компенсирует полностью нестационарные рассогласования между оптическими осями гелиостата и фотодатчика при ветровых воздействиях. Последнее обстоятельство не обеспечивает постоянтсво задающего сигнала в контуре регулирования скорости, пропорционального текущему перемещению Солнца и не снижает влияние на контур скорости помех от ветровых воздействий, что затрудняет использование гелиостата в качестве ведущего в группе ведомых гелиостатов...
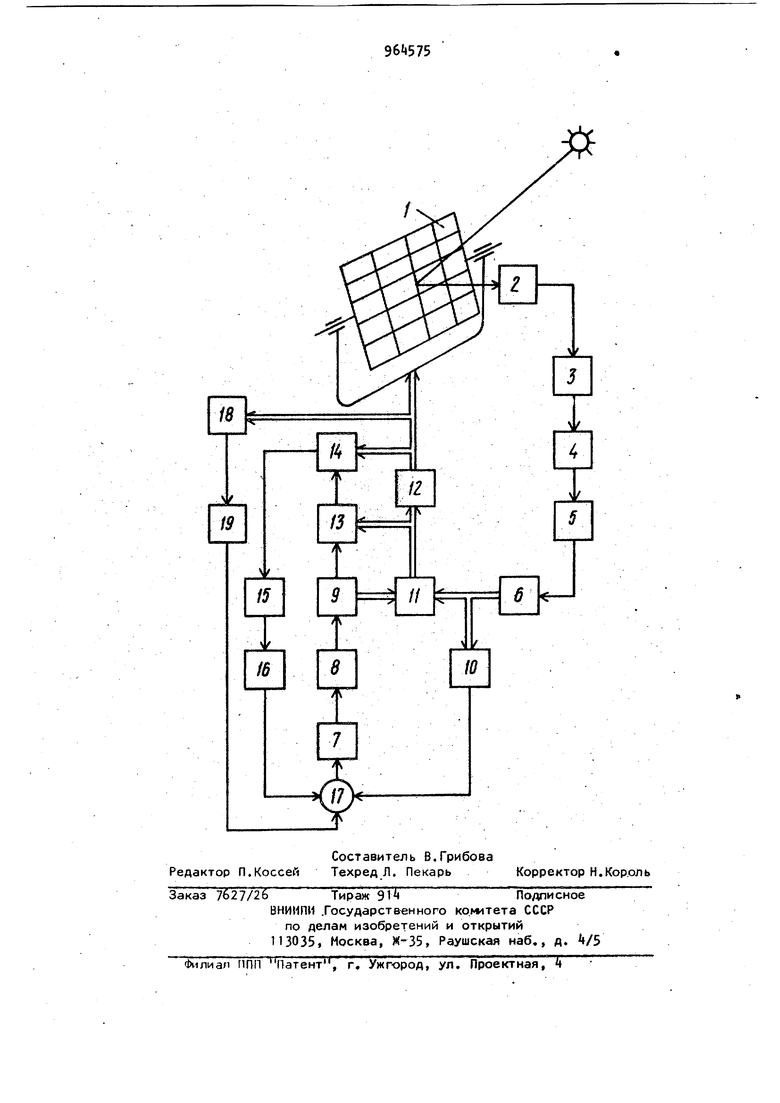
Наиболее близким техническим pisшением к изобретению является устройст,во для слежения за световыми объектами, содержащее оптический телескоп в двухкоординатной подвеске, в фокальной плоскости которого рас39положен датчик рассогласования, выход которого подключен к соединенным последовательно первым: усилителю,, усилители мощности и исполнительному механиз у, связанному через механический дифференциал с приводом телескопа и второй усилитель, выход которого подключен к со диненным последовательно вторым : ус лителю мощности и исполнительному механизму, связанному через механический дифференциал с приводом телескопа. Устройство содержит также связанный с валом первого исполнительного механизма измеритель угла поворота, выход которого подключен к входу второго усилителя 12, Система слежения Известного устройства обладает астатизмом второго порядка, что сводит к нулю скоростную ошибку и повышает точность в установившемся режиме слежения.. Известное устройство, обладая повышен ной точностью слежения, может быть использовано при создании следящего привода для гелиостата. Однако вынужденные колебания отражающей поверхности гелиостата дем фируются при этом в основном за сче диссипитавных сил в передаточном ме ханизме и, в меньшей степени,д за счет медленнодействующей системы ре гулирования. Задающий сигнал в контуре регулирования скорости содержит помехи от ветровых воздействий. Целью изобретения является повышение точности слежения путем коррекции кинематического люфта, умень шающей ошибки слежения от возмущений в виде ветрового воздействия. Поставленная цель достигается тем, что в следящую систему для управления гелиостатом, содержащую датчик рассогласования, последовательно соединенные первый усилитель усилитель мощности и исполнительный механизм, связанный с первым входным валом дифференциала, последовательно соединенные вторые усилитель, уси литель мощности и исполнительный механизм, связанный с вторым входны валом дифференциала, выходной вал которого через кинематическую передачу связан с исполнительной осью гелиостата, а также первый измерител угла поворота, связанный с валом первого исполнительного механизма, введены фильтр, последовательно соединенные второй и третий измерители угла поворота, фазочувствительный выпрямитель, первый дифференциатор и сумматор, и последовательно соединенные датчик угла скорости и второй дифференциатор, выход которого подключен к второму входу сумматора, третий вход которого соединен с выходом первого измерителя угла поворота, а выход - с входом второго усилителя, валы второго и третьего измерителей угла поворота связаны, соответственно, с выходным валом дифференциала и исполнительной осью гелиостата, на которой расположен датчик угловой скорости, вход и выход фильтра соединены, соответственно, с выходом датчика рассогласования и входом первого усилителя. На чертеже представлена блок-схема следящей системы для управления гелиостатом по одной оси наведения. Следящая система содержит гелиостат 1 , датчик 2 рассогласования, отрабать1ваю1чий сигнал, пропорциональный углу рассогласования между оптическими осями датчика и гелиостата, фильтр 3 низкой частоты, первые: усилитель Ц, усилитель 5 мощности и исполнительный механизм 6, вторые: усилитель 7, усилитель 8 мощности и исполнительный механизм 3, первый измеритель 10 угла поворота, отрабатывающий сигнал, пропорциональный скорости слежения, дифференциал 11, кинематическую передачу 12 с упругим люфтом, соединенный с выходной осью дифференциала второй измеритель 13 угла поворота, соединенный с исполнительной осью гелиостата,третий измеритель 14 угла поворота, фазочувствительный выпрямитель 15, первый дифференциатор 1б, сумматор 17, датчик 18 угловой скорости, второй дифференциатор 19. Выход сумматора 17 подключен к входу второго усилителя 7. Первым входом сумматора 17 является выход первого измерителя .10 угла поворота, третьим входом сумматора 17 является выход дифференциатора 19. В качестве измерителей 13 и 14. угла поворота могут быть применены, например, линейные вра1дающиеся трансформаторы, включенные по парной схеме трансформаторной дистанционной передачи. Выходное напряжение снимается с измерителя 14 угла поворота и характеризует собой величину и фазу углового смещения ротора изме5рителя 13 угла поворота относительно исходного положения согласования Это положение принимается таким, чтобы оно соответствовало симметричному раскрытию люфта в кинематической передаче 12 и отсутствию в нем упругих деформаций, а также чтобы оси однофазных обмоток измерителей 13 и. угла поворота были взаимно перпендикулярны. В качестве датчика рассогласования используется фотодатчик. На управляющей обмотке измерителя 1 угла поворота возникает переменное напряжение, амплитуда и фа за Которого определяется величиной и знаком угла взаимного рассогласования роторов измерителей 13 и И угла поворота. Сигнал рассогласования преобразуется фазочувствительным выпрямителем 15 в напряжение, полярность которого определяется знаком угла рассогласования, а его величина пропорциональна этому углу. Величина и полярность .сигнала на выходе первого дифференциатора 16 определяется величиной и знаком разности угловых скоростей между выходной осью дифференциала и исполнительной осью гелиостата, разомкнутыми люфтом звена 12 в переходных режимах слежения, но не зависит от величины угла рассогласования между измерителями 13 и угла поворота в установившемся режиме. Передаточные числа согласующих ре дукторов, устанавливаемых между изме рителями 13 и 1 угла поворота и соответствующими осями принимаются по условию равенства угловых перемещени роторов измерителей угла в установив шемся режиме слежения, а также по условию требуемой точности отработки сигналов упругого рассогласования. При отсутствии в следящей системе устройств для коррекции люфта амплитуда колебаний исполнительной оси ге лиостата при ветровых воздействиях характеризуется в основном величиной люфта на выходной ступени передаточного механизма. Поэтому исполнительная ось гелиостата и последняя ступень передаточного механизма (редуктора) являются местом установки изме рителей угла поворота, характеризующих люфт или упругость. Механическим дифференциал может содержать понижающий редуктор. 5 Ускоренная выборка кинематического и упругого люфтов выполняется с плавным изменением выходной координаты исполнительной оси гелиостата по окончании выборки люфта. Быстродействие следящей системы при ветровых возмущениях и эффективное демпфирование колебания скорости зеркала обеспечиваются применением малоинерционных, например полупроводниковых, преобразователей в качестве усилителей мацности, малоинерционных усилителей и измерительных устройств, компенсирующих влияние люфта или упругости. Для оптимизации режимов следящей системы и расширения области ее применения для гелиостатов с различным соотношением масс в опорно-поворотной конструкции к исполнительной оси гелиостата присоединен датчик 18 угловой скорости, например гигроскопиче-кий, выход которого через второй дифференциатор 19 подключен к третьему входу сумматора 17. Для использования следящей системы в качестве ведущей в составе группового управления полем ведомых гелиостатов и получения для этой цели опорного командного сигнала на выходе первого измерителя 10 угла поворота, пропорционального текущей скорости перемещения Солнца и не содержащего помех от нестационарных возмущений, включен низкочастотный фильтр. 3 между фотодатчиком 2 рассогласования и первым усилителем 4. Полоса пропускания фильтра 3 ограничена сверху низкочастотным спектром ветрового воздействия. Кроме того, амплитуда помех от ветрового воздействия в составе сигнала рассогласования, поступающего от фотодатчика в контур регулирования скорости (позиционный канал), уменьшается благодаря действию коррекции люфта. Действие обратных связей, компенсирующих влияние люфта или упругости, осуществляется только через силовой канал регулирования с исполнительным механизмом 9. Это обеспечивает получение опорного командного сигнала без помех на выходе первого измерителя 10 угла. Опорный сигнал может быть подключен к группе ведомь|х гелиостатов. Уменьшение среднеквадратичной ошибки слежения при ветровых воздействиях позволяет повысить точность слежения и повысить энергетическую
эффективность гелирустановки в целом. Отбор от следящей системы опорного командного сигнала, пропорционального текущей скорости перемещения Солнца и не содержащего помех от ветровых возмущений, позволяет подключить опорный сигнал к групее ведомых гелиостатов и упростить их систе му слежения.
формула изобретения
Следящая система для управления гелиостатом, содержащая датчик рассогласования, последовательно соединенные первые усилитель, усилитель мощности и исполнительный механизм, связанный с первым входным валом диф ференциала, последовательно соединенные вторые усилители, усилитель мощности и исполнительный механизм, связанный с вторым входным валом дифференциала, выходной вал которого через кинематическую передачу связан с. исполнительной осью гелиостата, а также первый измеритель угла поворота, связанный с валом пер.вого исполнительного механизма,
отличающаяся тем что,
t
с целью повышения точности слежения, в нее введены фильтр, последовательно соединенные второй и третий измерители угла поворота, фазочу в ст вит ел ь ны и вы пря ми тел ь, пер вё1й дифференциатор и сумматор, и последовательно соединенные датчик угпа скорости и второй дифференциатор, выход которого подключен к второ
входу сумматора, третий вход которого соединен с выходом первого измерителя угла поворота, а выход с входом второго усилителя, валы , второго и третьего измерителей угла поворота связаны, соответственно, с выходным валом дифференциала и исполнительной осью гелиостата, на которой расположен датчик угловой скорости, вход и выход фильтра соединены, соответственно, с выходом датчика рассогласования и входом первого усилителя..
Источники информации, принятые Во внимание при экспертизе Ь Патент Франции № 2373821, кл. G 05 В 13/02, опублик. 1977.
2, Авторское свидетельство СССР №658533, кл. G 05 D 1/02, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1980 |
|
SU885970A1 |
| Следящая система | 1981 |
|
SU1012197A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Следящая система | 1975 |
|
SU742871A1 |
| Двухканальная следящая система | 1973 |
|
SU446027A1 |
| Следящий привод | 1976 |
|
SU652529A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU376751A1 |
| Следящая система | 1983 |
|
SU1109712A1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| Устройство для слежения за световыми объектами | 1977 |
|
SU658533A1 |