Изобретение относится к области строительства, в частности, технологии ударного бурения скважин и может быть использована для создания контрольно-измерительных скважин в ядерно- и радиационно-опасных объектах.
Известен ударный механизм бурового станка [SU 1735559 А1, МПК Е21В 1/04, опубл. 23.05.1992], выбранный в качестве аналога. Указанное устройство включает в себя лебедку с канатом, основную балансирную и дополнительную балансирную рамы, установленные на оси качания, и имеющиеся на противоположных концах оттяжные ролики. Рамы шарнирно связаны шатунами с приводными дисками, жестко скрепленными между собой и получающие вращение от вала лебедки через шестерни. Шатуны закреплены на дисках в диаметрально противоположных точках относительно общего центра вращения дисков. Канат огибает ролики и концом связан с буровым снарядом. При вращении дисков через шатуны балансирные рамы находятся в синхронно-противофазном движении и посредством оттяжных роликов сообщают канату минимальное или максимальное натяжение (перегиб), разность между которыми составляет высоту подъема бурового снаряда над забоем скважины. При разрыве кинематической связи между приводным диском и оттяжными элементами трос и инструмент под собственным весом сбрасываются в забой, а оттяжные элементы возвращаются в исходное положение.
Известное устройство имеет следующие недостатки:
- изменение высоты подъема ударного инструмента для последующего сброса требует остановки оборудования и ручного изменения оператором, что снижает производительность устройства.
- использование балансирных рам и других сложных подвижных деталей приводит к риску разбалансировки конструкции устройства;
- большие габариты устройства сужают область его применения в ограниченных условиях и в закрытых помещениях.
Известно устройство «ударный механизм бурового станка» [SU 1640323 А1, МПК Е21В 1/02, Е21В 1/04, опубл. 30.09.1992], выбранное в качестве аналога. Указанное устройство состоит из балансирной рамы, закрепленной посредствам фиксатора на оси качания, которая имеет возможность поворота в подшипниках, установленных на раме станка. На одном конце (плече) рамы имеется оттяжной ролик, противоположный конец (плечо) рамы связан с шатуном, который при помощи осей закреплен соответственно на раме и водиле. На лебедке бурового станка установлена приводная шестерня, на которой жестко закреплен палец, при этом лебедка и приводная шестерня имеют возможность раздельного подключения к раздаточной коробке бурового станка, а водило возможность свободного вращения относительно приводной шестерни. Канат лебедки огибает оттяжные ролики, установленные на мачте, и закрепленные на ударном снаряде. В балансирной раме для фиксатора имеются крайние отверстия и ряд промежуточных отверстий.
Недостатком известного устройства является то, что для регулировки высоты забоя, путем закрепления фиксаторов в отверстиях балансирной рамы, необходимо полностью остановить работу оборудования.
Известно устройство для ударного бурения скважин [SU 1661345 А1, МПК Е21В 1/04, опубл. 07.07.1991], выбранное в качестве прототипа. На платформе прототипа установлен тормозной механизм барабана, опоры для валов, связанный с барабаном канат и электропривод с приводным валом, который связан посредством передаточного механизма с параллельным приводному валу валом барабана. Устройство снабжено датчиком натяжения каната и тормозным приспособлением, а передаточный механизм выполнен в виде установленного с возможностью перемещения по приводному валу электропривода блока из полнозубой и неполнозубой ведущих шестерен и неподвижно закрепленных на валу барабана полнозубых ведомых шестерен для взаимодействия с блоком шестерен приводного вала. Блок из полнозубых ведомых шестерен установлен на валу барабана посредством шпоночного соединения, в котором ширина шпоночного паза в шестерне превышает ширину шпонки, закрепленной на валу барабана. На барабане укреплен электроимпульсный тормоз, электрически связанный с датчиком натяжения каната.
Вал барабана установлен на двух опорах, на одной из которых закреплен датчик натяжения каната, включающий ролик с подвижным рычагом, взаимодействующим с конечным выключателем, пружиной и конечным выключателем, включенными в электрическую цепь тормозного устройства. На другой опоре вала барабана установлено тормозное электромеханическое приспособление, предназначенное для торможения и синхронизации ведомой шестерни на валу барабана, имеющей широкий шпоночный паз, с ведущей неполнозубой шестерней на валу электропривода. Тормозное приспособление электрически связано с датчиком натяжения каната.
Подъем и спуск инструмента в скважину производится при соединенных полнозубых шестернях. Переключение устройства с подъема на опускание (или наоборот) осуществляется реверсированием направления вращения электродвигателя. Для переключения на режим бурения металлическим поводком перемещается по ведущему валу подвижный блок шестерен, при этом расцепляются две полнозубые шестерни и соединяются две другие шестерни: неполнозубая на ведущем валу и полнозубая с широким шпоночным пазом на ведомом валу барабана. Пока зубья этих шестерен находятся в зацеплении, барабан вращается и поднимает инструмент. Когда зубья ведомой неполнозубой шестерни на валу барабана выходят из зацепления с зубьями ведущей шестерни на валу электропривода, под влиянием веса инструмента барабан с валом и ведомыми шестернями свободно вращается в обратную сторону и инструмент падает на забой. При ударе трос ослабляется, срабатывает датчик его натяжения, электрический тормоз останавливает барабан, тормозное приспособление синхронизирует шестерни, затем зубья ведомой неполнозубой шестерни на валу барабана входят в зацепление с зубьями ведущей шестерни на валу электропривода и начинается подъем, цикл повторяется. Недостатки этого устройства:
- переключение устройства с подъема инструмента на опускание (или наоборот) осуществляется реверсированием направления вращения электродвигателя вручную оператором, что приводит к переключению и остановке двигателя;
- в ударном режиме высота подъема инструмента для последующего сброса определяется конструкцией шестерен (диаметром, числом зубьев). Изменение высоты подъема в ударном режиме возможно только при замене шестерен;
- в конструкции датчика натяжения троса и конечного выключателя использовано подвижное коромысло, которое взаимодействует с подвижным тросом, что затрудняет регулировку срабатывания датчиков.
Техническим результатом изобретения является повышение эффективности использования известных устройств и расширение их функциональных возможностей.
Для достижения указанного технического результата может быть использовано известное автоматизированное устройство для ударного бурения скважин, которое представляет собой единую автоматизированную систему, состоящую из переносной платформы, с установленными на ней электродвигателем, редуктором, электроуправляемыми электромагнитными муфтами и катушкой, подвесного блока, через который перекинут металлический трос, соединенный одним концом с бойком, а другим с катушкой, и блока управления.
Согласно предлагаемому изобретению, устройство состоит из электродвигателя, катушки, с намотанным на нее металлическим тросом, и металлическим бойком, размещенным внутри обсадной трубы, оборудованной ударником на конце, помещенном в скважину. Электродвигатель соединен с редуктором посредством муфт. Вал редуктора связан с валом катушки с помощью, закрепленных посредством шпонок, конических шестерней, которые входят в зацепление и передают вращательный момент. Вал катушки оборудован передаточным механизмом и тормозным устройством и закреплен на переносной платформе при помощи двух опор. Передаточный механизм и тормозное устройство реализованы в виде электроуправляемых электромагнитных муфт. Металлический трос одним концом закреплен на катушке, а другим перекинут через подвесной блок и соединен с бойком. Подвесной блок оснащен кронштейном для крепления к различным опорам при помощи болтового соединения. Блок управления оснащен пультом дистанционного управления.
Указанный технический результат достигается за счет того, что для осуществления кинематической связи вала катушки с опорой и редуктором выбирают электроуправляемые электромагнитные муфты, которые позволяют осуществлять попеременно намотку, остановку процесса намотки и свободное раскручивание каната с катушки при постоянно вращающемся валу двигателя. Закрепленный на конце троса боек выполняют из стали в виде прутка меньшего диаметра, чем диаметр обсадной трубы, что позволяет ему свободно перемещаться внутри обсадной трубы, передавая при этом достаточное усилие на ударник за счет своей массы. Верхний конец обсадной трубы с помощью регулируемого хомута дополняют акселерометром, что позволяет определять момент достижения бойком ударника и автоматически останавливать свободное раскручивание катушки. Блок управления снабжают таймером, с помощью которого оператором задается время работы электроуправляемых электромагнитных муфт, что позволяет сохранять постоянной высоту подъема ударника по мере углубления забоя и изменять ее без остановки работы оборудования.
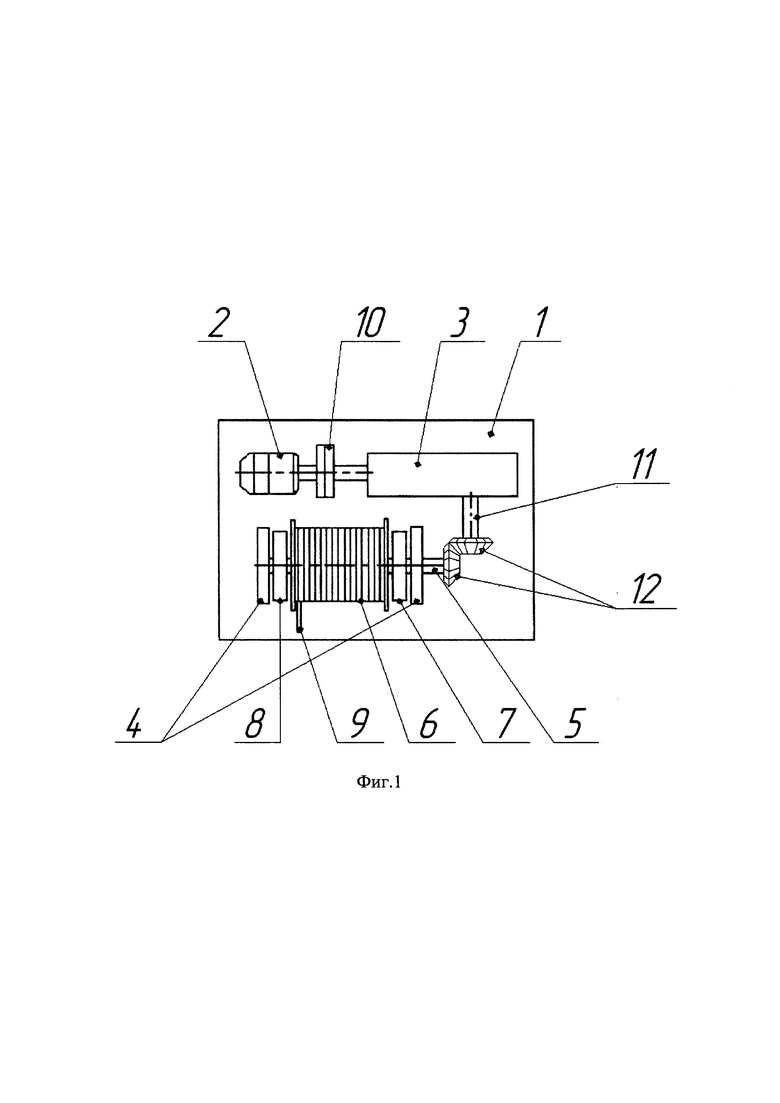
На фиг. 1 - представлена кинематическая схема переносной платформы автоматизированного устройства для ударного бурения скважин.
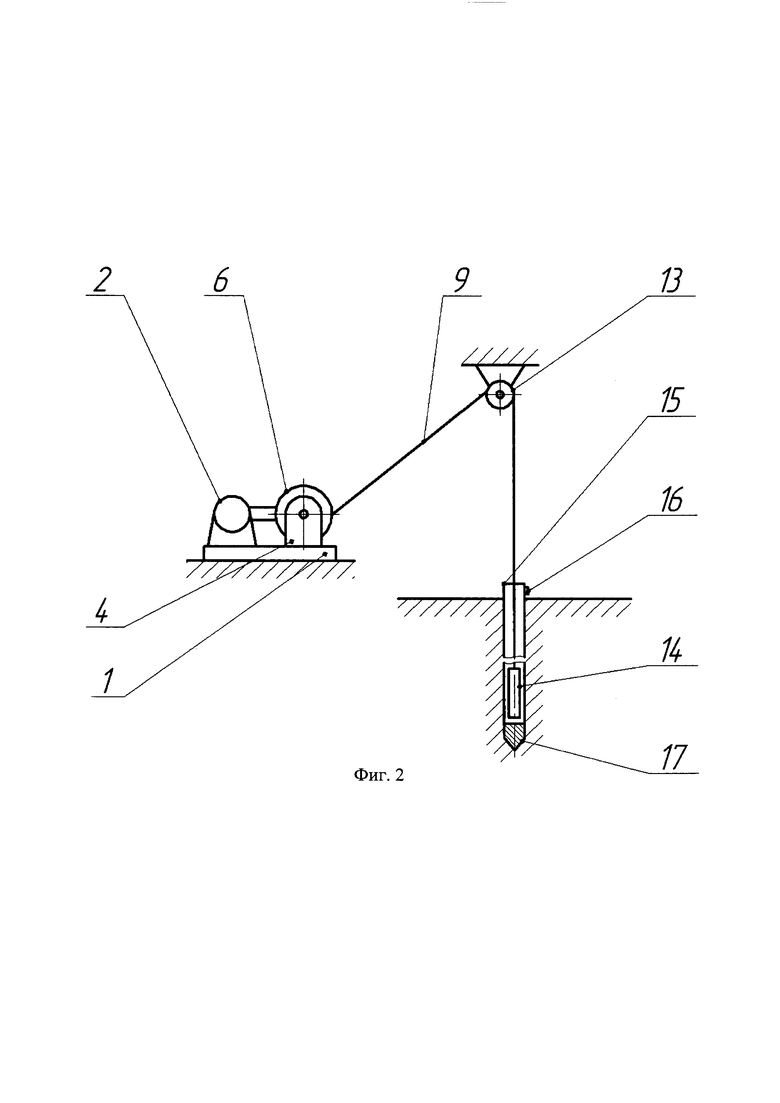
На фиг. 2 - представлена кинематическая схема автоматизированного устройства для ударного бурения скважин.
Предлагаемое автоматизированное устройство для ударного бурения скважин содержит установленные на переносной платформе 1 электродвигатель 2, редуктор 3 и опоры 4, на которых закреплен вал 5 с катушкой 6 в сборе с электроуправляемой передаточной электромагнитной муфтой 7 и электроуправляемой тормозной электромагнитной муфтой 8. На катушке закреплен металлический трос 9. Электродвигатель 2 и редуктор 3 связаны между собой посредствам муфты 10. Ведущий вал редуктора 11 связан с валом катушки 5 посредством сцепления конических шестерней 12. Закрепленный на катушке трос 9 перекинут через подвесной блок 13 и соединен с бойком 14. На наружном конце обсадной трубы 15 закреплен акселерометр 16. Конец трубы, помещенный в скважину, завершен ударником 17.
Устройство работает следующим образом.
Металлический трос 9 намотан на катушку 6, перекинут через подвесной блок 13 и опущен внутрь обсадной трубы 15. Под действием силы тяжести закрепленный за конец металлического троса 9 боек 14 падает вниз внутри обсадной трубы 15, при этом катушка 6 свободно раскручивается на валу 5. Далее боек 14 достигает ударника 17, в результате чего происходит удар. Закрепленный на наружном конце обсадной трубы 15 акселерометр 16 регистрирует вибрацию трубы в момент удара. Включается электромагнитная тормозная муфта 8 и, осуществляя кинематическое соединение катушки 6 с опорой 4, останавливает раскручивание металлического троса 9. Спустя время, заданное на встроенном в блок управления таймере, электромагнитная тормозная муфта 8 отключается и включается электромагнитная передаточная муфта 7. Электромагнитная передаточная муфта 7 осуществляет кинематическое соединение катушки 6 с валом 5, который приводится во вращение электродвигателем 2 посредством конических шестерней 12. Металлический трос 9 наматывается на крутящуюся вместе с валом 5 катушку 6 и поднимает боек 14. Через время, заданное оператором на встроенном в блок управления таймере, электромагнитная передаточная муфта 7 отключается, и поднятый внутри обсадной трубы 15 на фиксированную высоту боек 14 под действием силы тяжести падает и раскручивает металлический трос 9 со свободно вращающейся катушки 6.
Таким образом, предлагаемая конструкция устройства позволяет в автоматизированном режиме создавать контрольно-измерительные скважины в ЯРОО в условиях ограниченных помещений за счет использования единого блока управления, позволяющего управлять работой элементов автоматизированной системы дистанционно. Эффективность создания скважин повышается за счет использования электроуправляемых электромагнитных передаточной и тормозной муфт, работа которых обеспечивает опускание и поднятие ударника при безостановочно работающем двигателе, и расположенного на верхнем конце обсадной трубы акселерометра, позволяющего определить момент достижения бойком ударника, а также за счет использования таймера для задачи времени работы передаточной муфты, которое определяет высоту подъема ударника и позволяет сохранять ее по мере углубления забоя, и изменения этого времени без остановки работы оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ударного бурения скважин | 1989 |
|
SU1661345A1 |
| Передвижной ударно-вращательный станок для бурения неглубоких скважин | 1945 |
|
SU68933A1 |
| УСТРОЙСТВО ДЛЯ ПРОХОДКИ СКВАЖИН | 1993 |
|
RU2114272C1 |
| ПЕРФОРАТОР | 2017 |
|
RU2659045C1 |
| УСТРОЙСТВО ДЛЯ БУРЕНИЯ ГОРНЫХ ПОРОД | 2013 |
|
RU2560000C2 |
| УСТРОЙСТВО ДЛЯ БУРЕНИЯ ГОРНЫХ ПОРОД | 2015 |
|
RU2601877C1 |
| СВАЕБОЙНЫЙ МОЛОТ | 2005 |
|
RU2294432C2 |
| СПОСОБ БУРЕНИЯ ГОРНЫХ ПОРОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2473766C2 |
| ДИНАМИЧЕСКИЙ УДАРНИК | 1994 |
|
RU2069255C1 |
| УСТРОЙСТВО ДЛЯ РАЗРУШЕНИЯ ГОРНЫХ ПОРОД УДАРНЫМИ ИМПУЛЬСАМИ | 2019 |
|
RU2720041C1 |
Изобретение относится к области строительства, в частности к технологии ударного бурения скважин, и может быть использовано для создания в автоматизированном режиме контрольно-измерительных скважин в ядерно- и радиационно-опасных объектах. Автоматизированное устройство для ударного бурения скважин представляет собой единую автоматизированную систему, содержащую переносную платформу с установленными на ней электродвигателем, редуктором, электроуправляемыми электромагнитными муфтами и катушкой, подвесной блок, через который перекинут металлический трос, соединенный одним концом с бойком, а другим с катушкой, и блок управления. Передача кинетического момента вращения от ведущего вала на вал катушки реализована с помощью электроуправляемой электромагнитной передаточной муфты. Торможение вращения катушки реализовано с помощью электроуправляемой электромагнитной тормозной муфты. На верхнем конце обсадной трубы, внутри которой находится боек, расположен датчик удара, выполненный в виде акселерометра, позволяющего определить момент достижения бойком ударника и обеспечить возможность включения электромагнитной муфты. Управление работой элементов устройства производится дистанционно с блока управления. Высота подъема инструмента определяется временем работы электромагнитной передаточной муфты, задаваемым оператором на встроенном в блок управления таймере. Высота подъема инструмента над забоем, заданная оператором в начале работы, сохраняется по мере углубления забоя, а также может корректироваться оператором без прерывания работы. Обеспечивается повышение эффективности использования известных устройств и расширение их функциональных возможностей. 2 ил.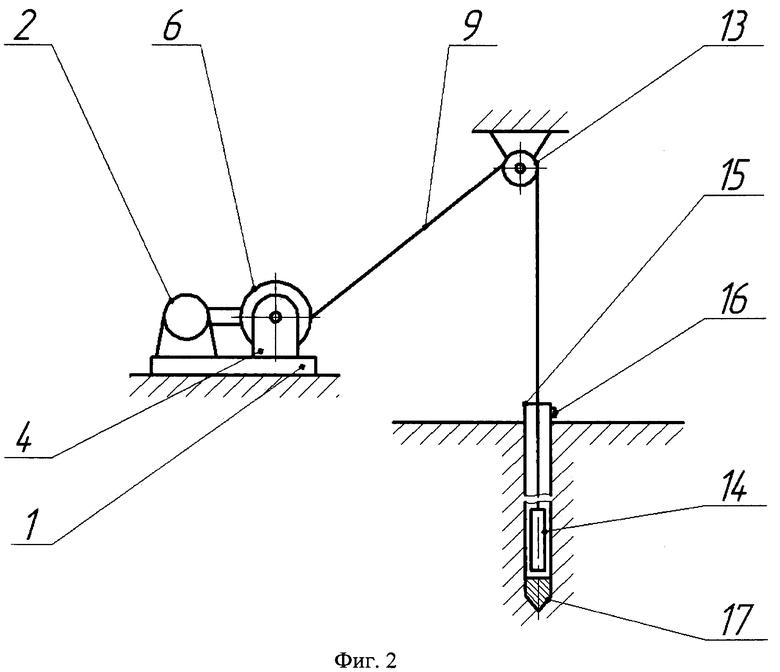
Автоматизированное устройство для ударного бурения скважин, представляющее собой единую автоматизированную систему, содержащую переносную платформу с установленными на ней электродвигателем, редуктором, электроуправляемыми электромагнитными муфтами и катушкой, подвесной блок, через который перекинут металлический трос, соединенный одним концом с бойком, а другим с катушкой, и блок управления, отличающееся тем, что передача кинетического момента вращения от ведущего вала на вал катушки реализована с помощью электроуправляемой электромагнитной передаточной муфты, торможение вращения катушки реализовано с помощью электроуправляемой электромагнитной тормозной муфты, на верхнем конце обсадной трубы, внутри которой находится боек, расположен датчик удара, выполненный в виде акселерометра, позволяющего определить момент достижения бойком ударника и обеспечить возможность включения электромагнитной муфты, управление работой элементов устройства производится дистанционно с блока управления, высота подъема инструмента определяется временем работы электромагнитной передаточной муфты, задаваемым оператором на встроенном в блок управления таймере, высота подъема инструмента над забоем, заданная оператором в начале работы, сохраняется по мере углубления забоя, а также может корректироваться оператором без прерывания работы.
| Устройство для ударного бурения скважин | 1989 |
|
SU1661345A1 |
| Гидравлическое устройство для дистанционного управления буровым станком | 1934 |
|
SU42007A1 |
| Электрическая буксирная лебедка | 1938 |
|
SU56393A1 |
| Станок для подземного канатно-ударного бурения с механизированным подъемом мачты | 1951 |
|
SU95971A1 |
| КОПРОВАЯ ЛЕБЕДКА | 0 |
|
SU319539A1 |
| Лебедка | 1979 |
|
SU958310A2 |
| Ударный механизм бурового станка | 1988 |
|
SU1640323A1 |
| Ударный механизм бурового станка | 1990 |
|
SU1735559A1 |
| Способ изготовления металлических рельефных печатных форм или рельефных фотографий | 1929 |
|
SU22675A1 |
| Канатный привод цепной пилы | 1979 |
|
SU872751A1 |
| US 4580640 A1, 08.04.1986. | |||

