(54) УСТРОЙСТВО ДЛЯ СКОРОСТНЫХ ИСПЫТАНИЙ МАТЕРИАЛОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для скоростных испытаний материалов на растяжение (его варианты) | 1982 |
|
SU1089474A1 |
| Установка для ударных испытаний материалов при сложном напряженном состоянии | 1984 |
|
SU1185177A1 |
| Установка для испытаний эластичных материалов при скоростном растяжении | 1990 |
|
SU1744576A1 |
| Установка для скоростных испытаний материалов | 1980 |
|
SU945741A1 |
| Машина для исследования сложного напряженного состояния трубчатых образцов материалов | 1958 |
|
SU121586A1 |
| УСТАНОВКА ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ КОЛЬЦЕВЫХ ОБРАЗЦОВ МАТЕРИАЛОВ НА РАСТЯЖЕНИЕ | 2014 |
|
RU2560015C1 |
| Нагружающее устройство для испытаний материалов на ползучесть при растяжении совместно с кручением | 1991 |
|
SU1796965A1 |
| Установка для циклического деформирования образцов материалов | 1989 |
|
SU1679260A1 |
| Устройство для исследования про-цЕССА плАСТичЕСКОгО дЕфОРМиРОВАНияпРи ВыСОКОСКОРОСТНОМ НАгРужЕНии | 1979 |
|
SU794424A1 |
| Установка для ударных испытаний материалов | 1985 |
|
SU1276952A1 |
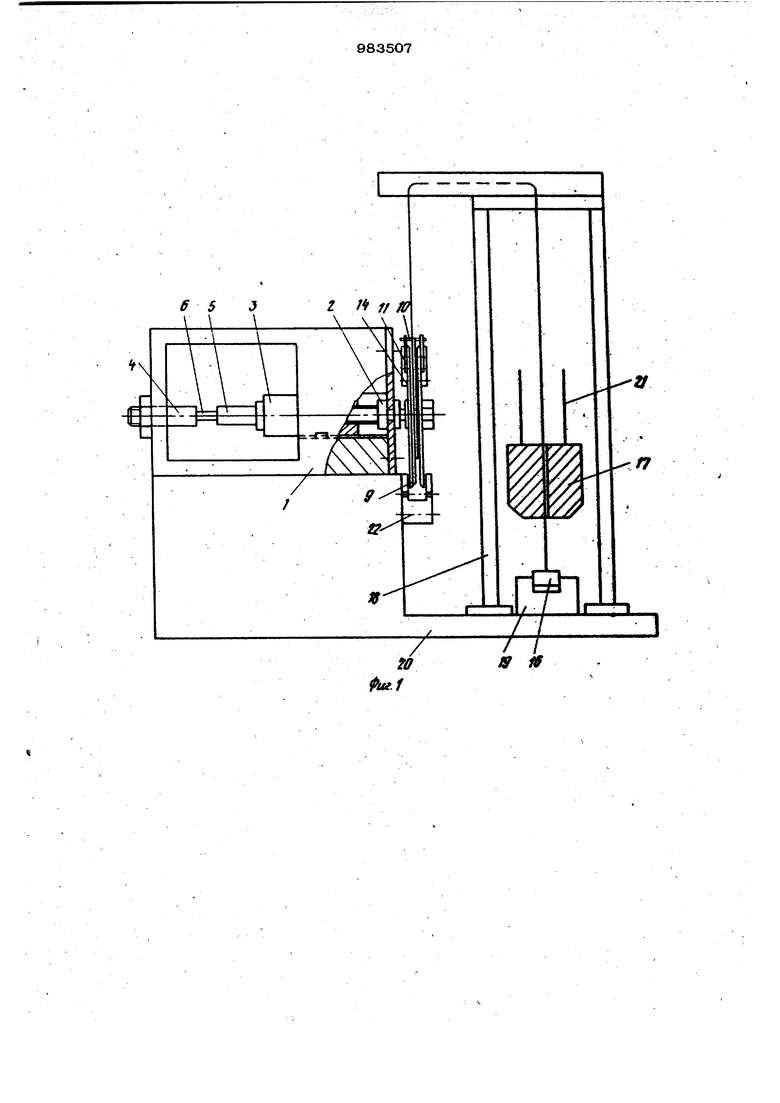
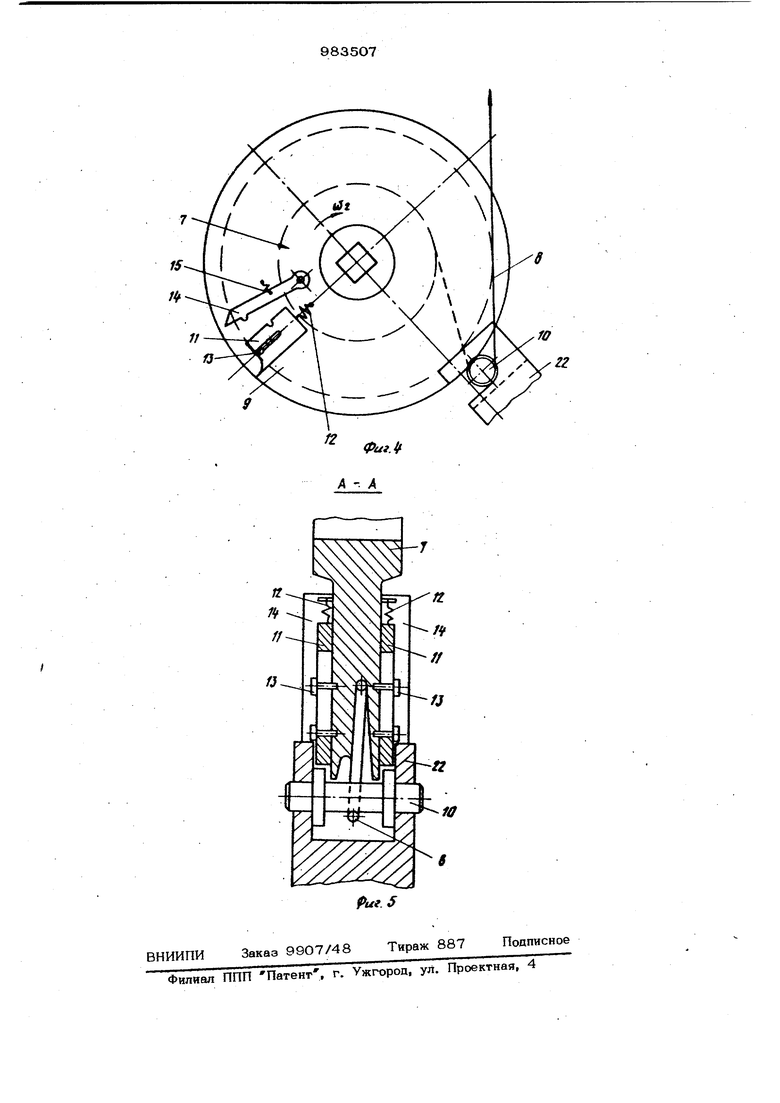
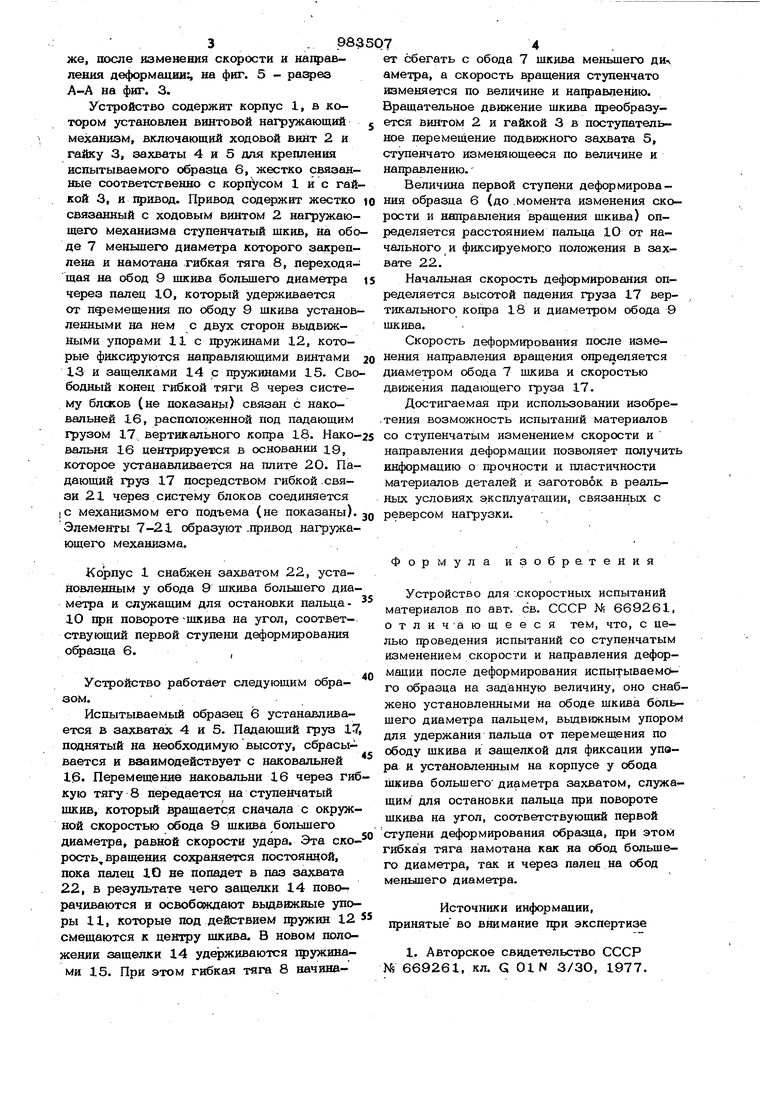
Изобретение относится к исследованию njjOHHocTHbix свойств материалов, а кмен-л но, к устройствам для скоростных испытаний материалов. По Основному авт. св. № 669261 известно устройство для скоростных испытаний материалов, содержащее корпус, установленный в корпусе винтовой нагружающий механизм с 15)иводом, выполненным в виде жестко связанного с ходовым винтом нагружающего механизма ступенчатого шкива, прикрепленной к щкиву гибкой тяги с наковальней на свободном конце и падающего груза, взаимодействукшего с наковальней, и захваты для крепления испытываемого образца. При этом гибкая тяга намотана на обод больщего или меныиего диаметра в зависимости от требуемой скорости деформирования ClJ. Однако известное устройство обеспечивает возможность испытания материалов только при постоянной скорости дефсрмирования, вплоть до реезрушенкя образца. Целью изобретения является проведение испытаний со ступенчатым кзмевеввем скорости и нащэавления дeфqpмaaEtI после деформирования испытьюаемого об разца на заданную величину. Поставленная цель достигается тем, что устройство снабжено установленными на ободе щкива большего диаметра пальцем, -выдвижным упором для удержания пальца от перемещения по ободу шкива и защелкой для фиксации упара я уст€ШОБленными на у. ббода шкива бопыщего диаметра захватом, служащим для остановки пальца при повороте шквЕ&а ни угол, соответствукмдий первой ступени деформирования , при этом гнйсая тяга намотана как на обод большего диа.- метра, так и палец на обод меньщего диаметра. На фиг. 1 изображена гфишипиальная схкема устройорва; на фиг. 2 - положение шкива в начальный момент; на фиг. 3 то же, в момент изменения скорости и нахфавления деформации; на фиг. 4 - то
же, после изменения скорости и направления деформации:, на фиг. 5 - А-А на фиг. 3.
Устройство содержит корпус 1, в котором установлен винтовой нагружающий механизм, включающий ходовой винт 2 и гайку 3, захваты 4 и 5 для крепления испытываемого образца 6, жестко связанные соответственно с корпусом 1 и с гайкой 3, и 141ивод. Привод содержит жестко связанный с ходовым винтом 2 нагружающего механизма ступенчатый шкив, на ободе 7 меньшего диаметра которого закреплена и намотана гибкая тяга 8, переходящая на обод 9 шкива большего диаметра через палец 1О, который удерживается от пфемещения по ободу 9 шкива установленными на нем с двух сторон выдвижными упорами Не пружинами 12, которые фиксируются направляющими винтами 13 и защелками 14 с юружинами 15. Свободный конец гибкой тяги 8 через систему блоков (не показаны) связан с наковальней 16, расположенной под падающим грузом 17. вертикального копра 18. Наковальня 16 центрируетвся в основании 19, которое устанавливается на плите 2О. Падающий груз 17 посредством гибкой .связи 21 через систему блоков соединяется |С механизмом его подъема (не доказаны), Элементы 7-21 образуют .привод нагружающего механизма. Корпус 1 снабжен захватом 22, установленным у обода 9 шкива большего диаметра и служащим для остановки пальца10 при повороте -шкива на угол, соответствующий первой ступени деформирования офазца 6. Устройство работает следующим образом. Испытываемый образец 6 устанавливается в захватах 4 и 5. Падающий груз 17 поднятый на необходимую высоту, сбрасывается и взаимодействует с наковальней 1(3. Перемещение наковальни 16 через гиб кую тягу 8 передается на ступенчатый шкив, который вращается сначала с окружной скоростью обода 9 шкива большего диаметра, равной скорости удара. Эта скорость, вращения сохраняется постоянной, пока палец 10 не попадет в паз захвата 22, в результате чего защелки 14 поворачиваются и освобояадают выдвижные упоры 11, которые под действием пружин 12 смещаются к центру шкива. В новом положении защелки 14 удерживаются гфужинами 15. При этом гибкая тяга 8 начинает сбегать с обода 7 шкива меньшего ди аметра, а скорость вращения ступенчато изменяется по величине и нагфавлению. Вращательное движение шкива хфеобразуется винтом 2 и гайкой 3 в поступательное перемещение подвижного захвата 5, ступенчато изменяющееся по величине и направлению. Величина первой ступени деформирования образца 6 (до .момента изменения скорости и направления вращения шкива) определяется расстоянием пальца 1О от начального и фиксируемого положения в захвате 22.
Начальная скорость дефс мирования определяется высотой падения груза 17 вертикального копра 18 и диаметром обода 9 шкива.
Скорость деформирования после изменения направления вращения определяется диаметром обода 7 шкива и скоростью движения падающего груза 17.
Достигаемая при использовании изобре. тения возможность испытаний материалов со ступенчатым изменением скорости и направления деформации позволяет получит информацию о прочности и пластичности материалов деталей и заготовок в реальных условиях эксплуатации, связанных с реверсом нагрузки. Формула изобретения Устройство для .скоростных испытаний материалов по авт. св. СССР № 669261, отличающееся тем, что, с целью проведения испытаний со ступенчатым изменением скорости и направления деформации после деформирования испытываемо го образца на заданную величину, оно снабжено установленными на ободе шкива большего диаметра пальцем, вьщвижным упором для удержания пальца от перемещения по ободу шкива и защелкой для фиксации упора и установленным на корпусе у обода шкива большего диаметра захватом, служащим для остановки пальца при повороте шкива на угол, соответствующий первой ступени деформирования образца, при этом гибкая тяга намотана как на обод большего диаметра, так и через палец на обод меныыего диаметра. Источники информации, принятые во внимание щзя экспертизе 1. Авторское свидетельство СССР Ms 669261, кл. G 01N З/ЗО, 1977.
