жения, величину которого определяют уровнем сигнала обратной-связи, дополнительно сравнивают; величи|ну обратной связи с Зс1данным, оп(ределяемым минимальной выходной мощностью пьезотрансформатора, в случае отклонения формируют управляющее воздействие по закону линейн нарастающегонапряжения до величины определяемой минимальной мощностью пьезотрансформатора, и изменяют частоту задающего генератора от рабоче частоты, определяемой минимальной мощностью пьезотрансформатора, посл чего указанное линейно нарастающее напряжение скачком уменьшают до первоначального значения, увеличивая . одновременно частоту задающего генератора до указанной рабочей, после чего процесс повторяют до исчезновения отклонения величины сигнала oбpaт oй связи от заданной.
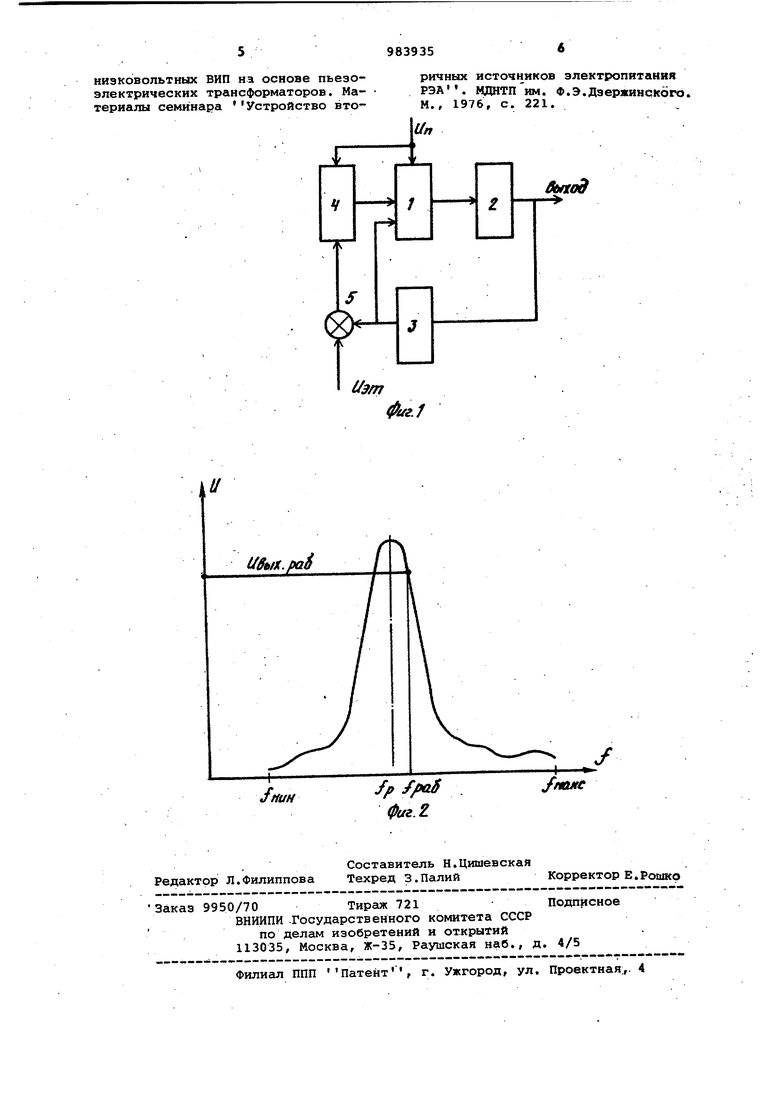
На фиг.1 представлена блок-схема стабилизированного преобразователя с использованием пьезотрансформатора; на фиг.2 - амплитудно-частотная характеристика пьезотрансформатора.
Преобразователь содержит задающий генератор 1, пьезотрансформатор 2, обратную связь 3, формирователь линейно-нарастающего напряжения и схему 5.сравнения.
Стабилизированный преобразовател реализующий предлагаемый способ управления, работает следующим обраразом.
При подаче сетевого напряжения на задающий генератор 1,и формирователь 4 линейно-нарастающего напряжения, причем последний подает это напряжение на вход задающего генератора, частота, задающего генератора 1 изменяется от частоты, находящейся за пределами резонансной кривой пьезотрансформатора 2 до рабочей частоты, находящейся на его резонансной кривой. При этом напряже ие на выходе обратной связи 3 сравнивается .схемой 5 сравнений с эталонным напряясением. При наличии перегрузки или короткого замыкания на выходе пьезотрансформатора 2 величина напряжения на выходе обратной связи 3 недостаточна для нормальной работы преобразователя и со схемы 5 сравнения на формирователь линейно-нарастающего напряжения подается сигнал, включающий формирователь 4, линейно-нарастающее напряжение которого управляет девиацией частоты задающего генераратора 1, причем амплитуда линейн.онарастающего напряжения выбираетсяиз условия обеспечения передачи минимальной мощности через пьеэотрансформаторы и другие силовые элементы схемы с целью защиты их от выхода из строя.
Процесс периодически повторяется до тех пор, пока не будет восстановлено нормальное сопротивление нагрузки, подключенной к выходу пьезотрансформатора .
Таким образом, предлагаемый способ позволяет исключить выход из строя силовых элементов преобразователя, что позволяет повысить надежность его -работы.
Формула изобретения
Способ управления стабилизированным преобразователем напряжения с пьезотрансформатором, имеющим задающий генератор, заключающийся в том, что рабочую частоту задающего генератора изменяют от частоты, находяй1ейся за пределами резонансной кривой пьезотрансформатора до рабочей частоты пьезотрансформатора, находящейся на одном из склонов его резонансной кривой путем подачи в момент запуска управляющего напряжения, величину которого определяют уровнем сигнала обратной связи,.отлич ающий с я тем, что, с целью повышения надежности за счет исключения аварийного режим работы силовых элементов схемы, дополнительно сравнивают величину сигнала обратной связи с заданным, определяемым минимальной выходной мощностью пьезотрансформатора, в случае отклонения формируют управгляющее воздействие по закону линейно нарастающего напряжения до величины, определяемой минимальной мощностью пьезотрансформатора, и изменяют частоту задающего.генератора от рабочей до частоты, определяемой, минимальной мощностью пьезотрансформатора, после чего указанно линейно нарастающее напряжение скачком уменьшают до первоначального значения, увеличивая одновременно частоту задающего генератора до указанной рабочей, после чего процесс повторяю.т до исчезновения отклонения величины сигнала обратной связи от .заданной.
Источники информации, принятые во внимание при экспертизе
1.Лавриненко В.В. Пьезоэлектрические трансформаторы. М., Энерги 1975, с. 81, рис. 30г.
2.Плужников В.М,, Семенов B.C. Пьезоэлектрические твердые схемы. Серия Библиотека- по автоматике . М,., М Энергия , 1971, с.142, рис.81, с. 144, рис. 8-5...
3.Злогодух Г.М., Шумеренко .И.П. Шейко Ю.А. Практическая реализация
низковольтных ВИП на основе пьезоэлектрических трансформаторов. Материалы семинара Устройство вторичных источников электропитания
РЭА- МДНТП-ИМ. Ф.Э.Дэержинскбго. Н., iy/О, С. 221.
t
///Г
ббпоВ
2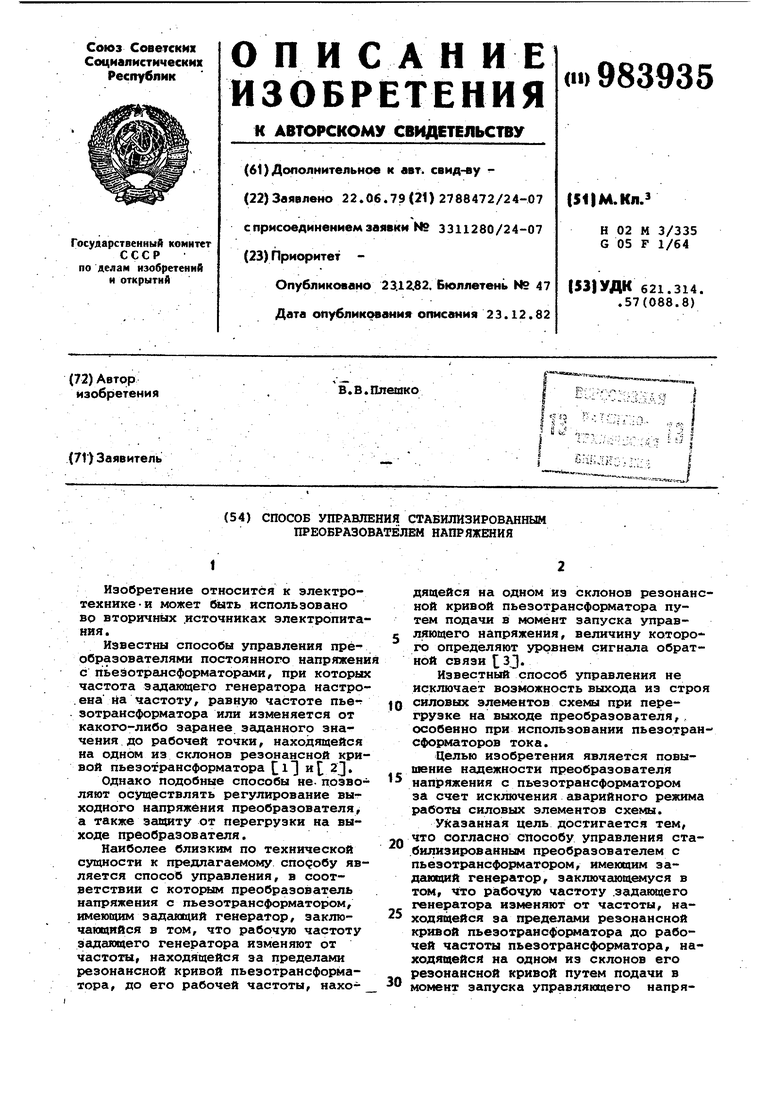

| название | год | авторы | номер документа |
|---|---|---|---|
| Стабилизированный преобразовательНАпРяжЕНия | 1979 |
|
SU845241A1 |
| Преобразователь постоянного напряжения в постоянное | 1980 |
|
SU907728A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ГИДРОАКУСТИЧЕСКОГО ПЬЕЗОЭЛЕКТРИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2493543C2 |
| Способ частотно-амплитудного управления напряжением в пьезополупроводниковых преобразователях | 1976 |
|
SU600640A1 |
| Стабилизированная система электропитанияНА бАзЕ пьЕзОТРАНСфОРМАТОРА | 1979 |
|
SU851687A1 |
| Стабилизированный преобразователь напряжения | 1980 |
|
SU907727A1 |
| Способ управления пьезотрансформатором высоковольтного усилителя электрогидропневматического преобразователя | 1978 |
|
SU769132A1 |
| Пьезополупроводниковый стабилизатор напряжения | 1984 |
|
SU1241369A1 |
| Устройство для контроля сложных объектов | 1987 |
|
SU1509833A1 |
| Управляющее устройство стабилизированного пъезополупроводникового источника питания | 1984 |
|
SU1241373A1 |
(gH
