(54) СПОСОБ УПРАВЛЕНИЯ МНОГОЯЧЕЙКОВОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления многоячейковой системой электропитания | 1978 |
|
SU864465A1 |
| Способ управления многоячейковым многодиапазонным стабилизатором тока | 1987 |
|
SU1472890A1 |
| Способ управления многоячейковой системой электропитания | 1986 |
|
SU1332285A2 |
| СПОСОБ УПРАВЛЕНИЯ СЛЕДЯЩИМ МНОГОЯЧЕЙКОВЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1991 |
|
RU2026601C1 |
| Регулируемый многоячейковый преобразователь | 1988 |
|
SU1661736A1 |
| МОДУЛЬНЫЙ ПАКЕТ ЭЛЕКТРОЛИЗЕРА И СПОСОБ КОНВЕРСИИ ДИОКСИДА УГЛЕРОДА В ГАЗООБРАЗНЫЕ ПРОДУКТЫ ПОД ВЫСОКИМ ДАВЛЕНИЕМ И С ВЫСОКОЙ СТЕПЕНЬЮ КОНВЕРСИИ | 2019 |
|
RU2817540C2 |
| Система электропитания | 1985 |
|
SU1319003A1 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМИ СТАБИЛИЗИРОВАННЫМИ ИСТОЧНИКАМИ НАПРЯЖЕНИЯ ПОСТОЯННОГО ТОКА, РАБОТАЮЩИМИ ПАРАЛЛЕЛЬНО НА ОБЩУЮ НАГРУЗКУ | 2008 |
|
RU2353042C1 |
| Преобразователь постоянного напряжения в трехфазное квазисинусоидальное трехфазное напряжение | 1988 |
|
SU1518854A1 |
| Вентильный преобразователь переменного напряжения в постоянное | 1980 |
|
SU917280A1 |
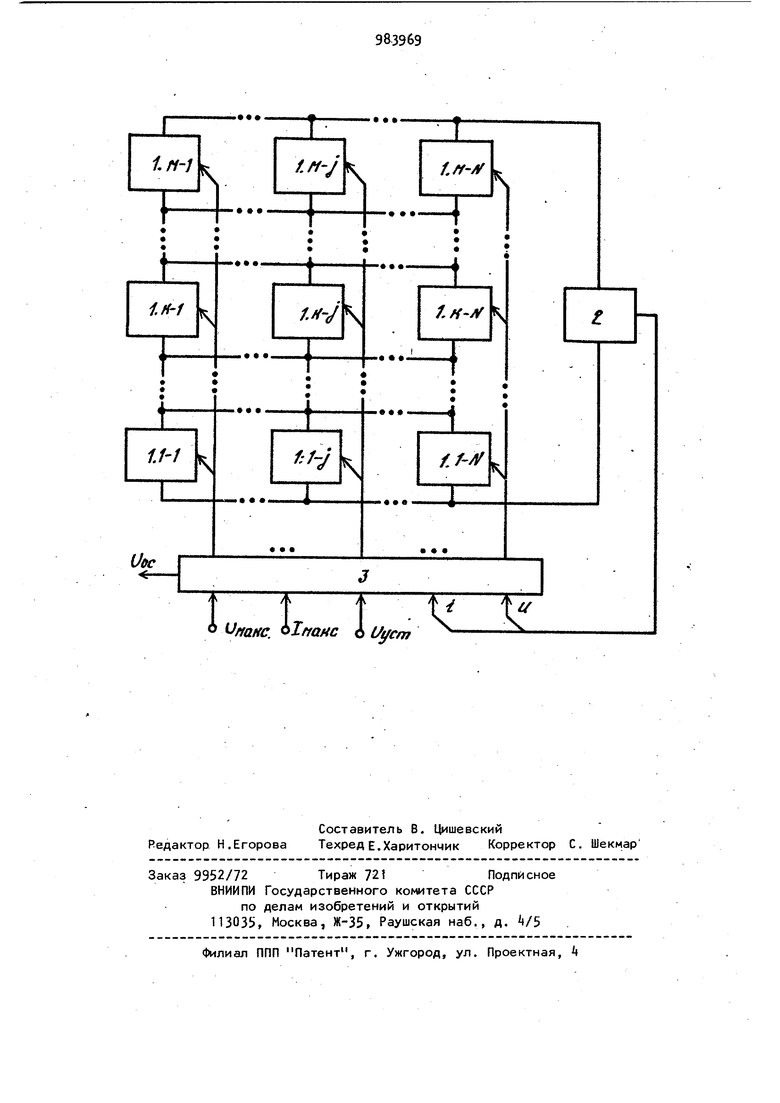
Изобретение относится к преобразовательной технике и может быть использовано при создании устройств электропитания, выходное напряжение и выходной ток которых стабилизируется на уровнях, изменяющихся в широких пределах, в частности при соз дании установок для электрофореза. Известен способ управления много ячейковой системой электропитания, ячейки которой соединены последовательно по выходу, заключающийся в том, что преобразуют разность между мгновенным значением выходного параметра многоячейковой системы электропитания и установкой этого параметра в управляющий сигнал отри цательной обратной связи и последовательно с гарантированной временной задержкой подключают или отключают силовые ячейки в зависимости от величины управляющего сигнапаГ , Недостаток способа состоит в ниа кой динамической точности, так как н личие гарантированных задержек может привести к значительным перерегулированиям выходного параметра (напряжения или тока) системы электропитания . Наиболее близким к изобретению по технической сущности является способ управления кйногоячейковой системой электропитания, содержащей (M+N) ячеек, при котором измеряют значения первого и второго параметров многоячейковой системы электропитания, сравнивают значения этих параметров с соответствующими предельными значениями первого второго А цкспараметроа одной ячейки и включают необходимое число Kxj ячеек при этом гюрвым выходным параметром каждой ячейки, управляют с помощью сигнала отрицательной о атной связи, полученного в результате сравнения первого выходного параметра многоячейковой системы электропитаНИЯ с сигналом уставки этого парамет pa A,C2J. Недостаток известного способа состоит в том, что сигнал на подключение и отключение ячеек формируется в течение переходного процесса, например выхода на установившийся режим или скачкообразного изменения нагрузки. Это приводит к низкой динами неской точности системы электропитания, т.е. к ухудшению качества энер гии на выходе многоячейковой системы электропитания в переходных режимах. Целью изобретения является улучше ние качества энергии на выходе много ячейковой системы электропитания путем увеличения динамической точности стабилизации первого или второго выходных параметров системы. Эта цель достигается тем, что сог ласно способу управления многоячейковой системой электропитания, содержащей (M+N) ячеек, при котором измеряют значения первого и второго параметров многоячейковой системы электропитания, сравнивают значения этих параметров с соответствующими предельными значениями первого (( и второго А2ц,ац,л1ар а метров одной ячей ки и включают необходимое число Kxj ячеек, при этом первым выходным параметром каждой ячейки управляют с помощью сигнала отрицательной обратной связи, полученного в результате сравнения первого выходного па.раметра многоячейковой системы электропитания с сигналом уставки этого параметра А,., указанную опера цию измерения проводят по отношению к мгновенным значениям первого а и второго а2 выходных параметров системы, а указанное необходимое чис ло K(j ячеек определяют из условий fMOIKC IMOtKC А j макс гмаксВ частности при стабилизации выходного напряжения многоячейковой системы электропитания в каяестве первого выходного параметра используют выходное напряжение, а в качестве второго выходного параметра выходной ток мйогоячейковой системы электропитания, при этом К - число последовательно, а j - число паралМногоячейковая система электропитания состоит из матрицы (M-+N) преобразовательных ячеек 1, выходы которых, соединенные последовательно и параллельно, образуют выход системы электропитания, подключенный к нагрузке 2. Величиной напряжения на выходе каждой ячейки, а также количеством последовалельно включенных ячеек; при стабилизации выходного тока многоячейковой системы электропитания в качестве первого выходного параметра используют выходной ток, а в качестве второго выходного параметра - выходное напряжение многоячейковой системы электропитания, при этом К - число параллельно, а j - число последовательно включенных ячеек. На чертеже представлена блок-схема многоячейковой системы электропитания, работающей в режиме стабилизации выходного напряжения; где 1.1-1.M-N - ячейки многоячейковой системы электропитания;индексы, указывающие номер яруса (число последовательных ячеек); индексы, указывающие номер столбца (число параллельных ячеек); сигнал, соответствующий максимальному напряжению на выходе одной ячейки ; сигнал, соответствующий максимальному току одной ячейки; сигнал уставки выходного напряжения многоячейковой системы электропитания ; мгновенное значение напряжения на выходе системы; мгновенное значение тока на выходе системы ; сигнал отрицательной обратной связи, регулирующий напряжение на выходе каждой ячейки. тельно и параллельно включенных ячеек 1 управляет блок 3 управления. На вход блока управления поступа ют сигналы уставки выходного напряжения ILj-T многоячейковой системы электропитания,а также сигналы, соот ветствующие предельным значениям вы ходного напряжения Ц, ки. При стабилизации выходного напря жения много ячейковой системы электропитания мгновенное значение этого напряжения О в блоке 3 управления i сравнивается с сигналом уставки и усредненная .усиленная разность в де управляющего сигнала отрицательной обратной связи Ugc воздействуе на вдаодное -напряжение всех ячеек, что реализует принцип управления по отклонению выходного параметра от заданного значения. Для улучшения динамической точности системы элект ропитания необходимо, чтобы количес во включенных параллельно j и лосле довательно К ячеек было минимально обходимым для обеспечения заданного режима нагрузки, так как при этом отпадает необходимость дополнительных коммутаций в течение переходно го процесса, что уменьшает длительность последнего, а также перерегул рование. Так как максимальное значе ние выходного напряжения ячейки Цчсяко установленное значение вы;ХОдного напряжения многоячейковой системы электропитания Ц,ст, минимал ное количество последовательно соединенных ячеек, обеспечивающих заданный режим работы, определяется ближайшим целым числом, полученным из соотношения ,. + 1. MOIKCUMOIKC Так как мгновенное .значение выходных параметров многоячейковой чи тоты электропитания U и i, то при активной и сравнительно медленно изменяющейся нагрузке установившееся значение выходного тока равно VCT-i - г 03„, ,кс Для обеспечения его необходимо, чтобы количество параллельно включе ных ячеек определялось из выраженияScT-i Srcj макс,JMOKC-W Управляющее устройство вычисляет значения К и j и включает соответствующее количество Kxj ячеек системы электропитания. При стабилизации выходного тока процессы происходят аналогично. Параметрами а AfmdKO являются мгновенное значение выходного тока многоячейковой cиcтe 4J электропитания, предельное значение выходного тока ячейки, общее количество параллельно соединенных ячеек и количество включенных из них соответственно. В качестве параметров Z ZtKaKC используют мгновенное значение выходного напряжения многоячейковой системы электропитани1Ч, максимальное значение выходного напряжения ячейки, количество последовательно соединенных ячеек в системе, количество включенных из них, соответственно. Управляющее устройство может быть выполнено либо в виде регистра сдвига и блока компараторов, либо в виде микропроцессорного блока. Так как количество параллельно включаемых ячеек при стабилизации выходного напряжения (и последователь но включаемых при стабилизации выходного тока) устанавливается уже в самом начале переходных процессов выхода на установившийся режим или скачкообразного изменения нагруз1в1, , то при предлагаемом способе управления исключается перерегулирование, связанное с коммутацией избыточных ячеек, что обуславливает увеличение динамической точности стабилизации заданного выходного параметра, т.е. улучшения качества выходной энергии многоячейковой системы электропитания. Использование указанного способа управления в блоке питания электрофоретической установки позволяет улучшить качество разделения биопогических веществ. Формула изобретения 1. Способ управления многоячейковой системой электропитания, содержащей (М-fN) ячеек, при котором измеряют значения первого и второго параметров многоячейковой системы электропитания, сравнивают значения этих параметров с соответствующими предельными значениями первого VMOIKC второго А2„о|КС параметров одной ячейки , и включают необходимое число Kxj ячеек, при этом первым выходным параметром каждой ячейки управляют с помощью сигнала отрицательной обратной связи, полученного в результате сравнения первого выходного .параметра многоячейковой системы электропитания с сигналом уставки этого параметра iicrr отличающийся тем что, с целью улучшения качества эне гии на выходе многоячейковой систе мы электропитания путем увеличения динамической точности стабилизации первого или второго выходного параметра системы, указанную операцию измерения проводят по отношению к мгновенным значениям первого и второго а„ выходных параметров си темы, а указанное необходимое число Kxj ячеек определяют из условий Цмйкс |МС1КС .- fl 12МС1КС 0 | 2MClKC 2. Способ по п. 1, отличаю щийся тем, что при стабилизаци ВЫХОДНОГО напряжения многоячейковой системы электропитания в качестве первого выходного параметра используют выходное напряжение, а в качестве второго выходного параметра выходной ток многоячейковой системы электропитания, при-этом К - число последовательно, а j - число параллельно включенных ячеек. 3. Способ по п. 1, отличающий с я тем, что при стабилизации выходного тока многоячейковой системы электропитания в качестве первого выходного параметра используют выходной ток, а в качестве второго выходного параметра - выходное напряжение многоячейковой системы электропитания, при этом К - число параллельно, а j - число последовательно включенных ячеек. Источники информации, принятые во внимание при экспертизе 1.Дуплин Н. И,, Мусолин А, К. и др. Резервированный вольтодобавочный стабилизатор с амплитудным регулированием выходного напряжения. Электронная техника в автоматике. Под ред. Ю. И. Конева, М., Советское радио, 1980, вып. 11, с. 140-14А, рис. 1. 2.Дуплии Н. И.,Миловзоров В.П. и др. Широкодиапазонный стабилизатор постоянного напряжения повышенной надежности. Электронная техника в автоматике. Под ред. Ю. И. Конева, М., Советское радио,, 1976, вып.8, с. 108-11 А, рис. 1. f.H-j /./У-/5.. -± 1:,-j 1I V olffOffC 6 ГЛ7 ffa/fc. olffOffc 6 гл7 -n ) i j I f
