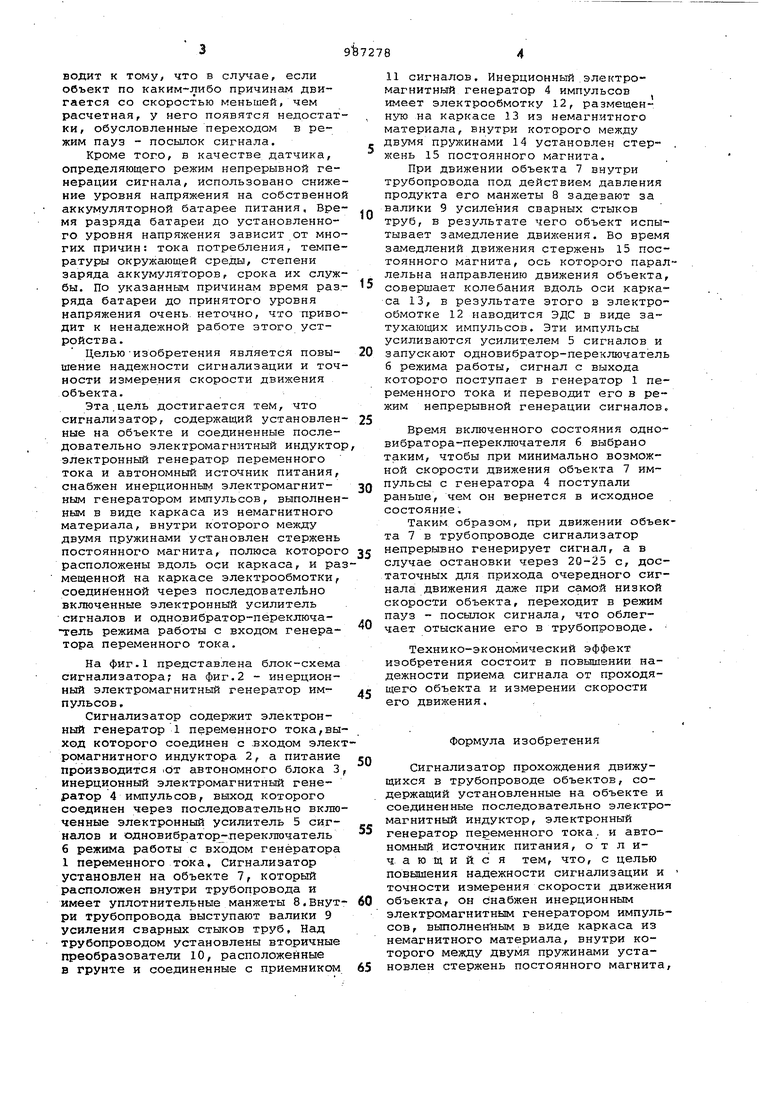
водит к тому, что в случае, если объект по каким-либо причир5ам двигается со скоростью меньшей, чем расчетная, у него появятся недостат ки, обусловленные переходом в режим пауз - посылок сигнала. Кроме того, в качестве датчика, определяющего режим непрерывной генерации сигнала, использовано сниже ние уровня напряжения на собственно аккумуляторной батарее питания, Вре мя разряда батареи до установленного уровня напряжения зависит от мно гих причин: тока потребления, темпе ратуры окружающей среды, степени заряда аккумуляторов, срока их служ бы. По указанным причинам время раз ряда батареи до принятого уровня напряжения очень, неточно, что приво дит к ненадежной работе этого устройства. Цельюизобретения является повышение надежности сигнализации и точ ности измерения скорости движения объекта. Эта.цель достигается тем, что сигнализатор, содержащий установлен ные на объекте и соединенные последовательно электромагнитный индуктор электронный генератор переменного тока и автономнЕлй источник питания, снабжен инерционным электромагнитным генератором импульсов, выполнен ным в виде каркаса из немагнитного материала, внутри которого между двумя пружинами установлен стержень постоянного магнита, полюса которог расположены вдоль оси каркаса, и ра мещенной на каркасе электрообмотки, соединенной через последовательно включенные электронный усилитель сигналов и одновибратор-переключа тель режима работы с входом генератора переменного тока. На фиг.1 представлена блок-схема сигнализатора; на фиг.2 - инерционный электромагнитный генератор импульсов , Сигнализатор содержит электронный генератор 1 переменного тока,выход которого соединен с .входом элект ромагнитного индуктора 2, а питание производится ют автономного блока 3 инерционный электромагнитный генератор 4 импульсов, выход которого соединен через последовательно включенные электронный усилитель 5 сигналов и одновибрато|з-переключатель 6 режима работы с входом генератора 1 переменного тока, сигнализатор установлен на объекте 7, который расположен внутри трубопровода и имеет уплотнительные манжеты 8.Внутри трубопровода выступают валики 9 усиления сварных стыков труб. Над трубопроводом установлены вторичные преобразователи 10, расположенные в грунте и соединенные с приемником 11 сигналов. Инерционный.электромагнитный генератор 4 импульсов имеет электрообмотку 12, размещенную на каркасе 13 иэ немагнитного материала, внутри которого между двумя пружинами 14 установлен стержень 15 постоянного магнита. При движении объекта 7 внутри трубопровода под действием давления продукта его манжеты 8 задевают за валики 9 усиления сварных стыков труб, в результате чего объект испытывает замедление движения. Во время замедлений движения стержень 15 постоянного магнита, ось которого параллельна направлению движения объекта, совершает колебания вдоль оси каркаса 13, в результате этого в электрообмотке 12 наводится ЭДС в виде затухающих импульсов. Эти импульсы усиливаются усилителем 5 сигналов и запускают одновибратор-переключатель 6 режима работы, сигнал с выхода которого поступает в генератор 1 переменного тока и переводит его в режим непрерывной генерации сигналов. Время включенного состояния одновибратора-переключателя б выбрано таким, чтобы при минимально возможной скорости движения объекта 7 импульсы с генератора 4 поступали раньше, чем он вернется в исходное состояние. Таким образом, при движении объекта 7 в трубопроводе сигнализатор непрерывно генерирует сигнал, а в случае остановки через 20-25 с, достаточных для прихода очереднохО сигнала движения даже при самой низкой скорости объекта, переходит в режим пауз - посылок сигнала, что облегчает отыскание его в трубопроводе. Технико-экономический эффект изобретения состоит в повышении надежности приема сигнала от проходящего объекта и измерении скорости его движения. Формула изобретения Сигнализатор прохождения движущихся в трубопроводе объектов, содержащий установленные на объекте и соединенные последовательно электромагнитный индуктор, электронный генератор переменного тока, и автономный источник питания, о т л ич а ю щ и и с я тем, что, с целью повьииения надежности сигнализации и точности измерения скорости движения объекта, он снабжен инерционным электромагнитным генератором импульсов, выполненным в виде каркаса из немагнитного материала, внутри которого между двумя пружинами установлен стержень постоянного магнита.
полюса которого ра положенывдоль оси каркаса, и размещенной на каркасе электрррбмотки, соединенной через последовательно 8к;тчениые электронный усилитель сигналов и однoвибpatop-пepeключaтeль режима работы с входом генератора переменного тока.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 634105, кл. G 01 D 5/12, 1977.
2.Техническое описание зиз
259.008ТО на передатчик УМЭ-03 комплекса Пумс1-1. СКВ Газприборавтоматика/ 1980 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ ПОЛОЖЕНИЯ ВНУТРИТРУБНЫХ ОБЪЕКТОВ | 2002 |
|
RU2210020C1 |
| Сигнализатор прохождения движущихся в трубопроводе объектов | 1987 |
|
SU1456689A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОЧИСТНЫХ И ДИАГНОСТИЧЕСКИХ СНАРЯДОВ В ТРУБОПРОВОДЕ | 1996 |
|
RU2110729C1 |
| УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ ПОЛОЖЕНИЯ ВНУТРИТРУБНЫХ ОБЪЕКТОВ И СПОСОБ ЕГО ПРИМЕНЕНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2206815C1 |
| УСТРОЙСТВО ЗАЩИТЫ ОБЪЕКТА ОТ НЕСАНКЦИОНИРОВАННОГО ВОЗДЕЙСТВИЯ | 1993 |
|
RU2081455C1 |
| СПОСОБ ОБМЕНА ДАННЫМИ И УПРАВЛЕНИЯ ВНУТРИТРУБНЫМИ ОБЪЕКТАМИ | 2002 |
|
RU2216686C1 |
| Способ контроля механических свойств металлопроката, изготовленного из ферромагнитных металлических сплавов и устройство для его осуществления | 2023 |
|
RU2807964C1 |
| СПОСОБ ЗАПУСКА МИКРО- И НАНОСПУТНИКОВ И УСТРОЙСТВО НА ОСНОВЕ МИКРОПРОЦЕССОРНОЙ МАГНИТОИНДУКЦИОННОЙ СИСТЕМЫ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЗАПУСКА | 2015 |
|
RU2603441C1 |
| Автономный сигнализатор положения объекта | 1987 |
|
SU1516789A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПРОХОЖДЕНИЯ ОБЪЕКТОВ ИЗ МАГНИТНОГО МАТЕРИАЛА ВНУТРИ ТРУБОПРОВОДА | 1995 |
|
RU2097649C1 |
-.
X
/f
i itiiH(i iiii«iiii«iii«: iiii;liV
/2
/
аг.г
