(54) УСТГОЙСТВО ДЛЯ МОДЕЛИЮВАНИЯ НЕВЕСОМОГО СЛОЖНО-НАПРЯЖЕННОГО СТЕРЖНЯ
1
Изобретение относится к аналоговой вычислительной технике и может быть использовано при создании специальных вычислительных устройств.
Известно устройство для моделирования сложно-напряженного стержня, вьшолненное по второй системе злектромеханических аналогий и содержащее соединенные между собой катушки индуктивности, ктырехобмоточный трансформатор и стабилизаторы тока 1.
Однако известное устройство напригодно при создании специальных аналоговых вычислительных машин по первой системе электромеханических аналогий.
Наиболее близким к предлагаемому явЛяется устройство для моделирования невесомого стержня для случая чистого изгиба, созданное по первой системе аналогий в виде двенадцатиполюсника 2.
Недостатком данного устройства является его непригодность для моделирования работы невесомого стержня при сложном напряженном состоянии.
Цель изобретения - расширение функцнональных возможностей устройства, позволяющее использовать устройство для моделирования сложно-напряженного стержня при учете взаимосвязи внутренних усилий.
Указаш1ая цель достнгается тем, что в устройство для моделирования невесомого сложно-напряженного стержня, содержащее четыре шунтирующих конденсатора и трансформатор, пргаем выводы первого шунтирующего кон10денсатора соответственно соединены с первой парой полюсов отображения продольной силы и продольной скорости на одном конце моделируемого участка стержня, соответственно соединенных с второй парой полюсов отображения
15 продольной силы и продольной скорости на яругом конце моделируемого участка стержня, выводы пертичной обмотки трансформатора соединены соответственно с вьгаодами второго шунтирующего конденсатора и подключены к
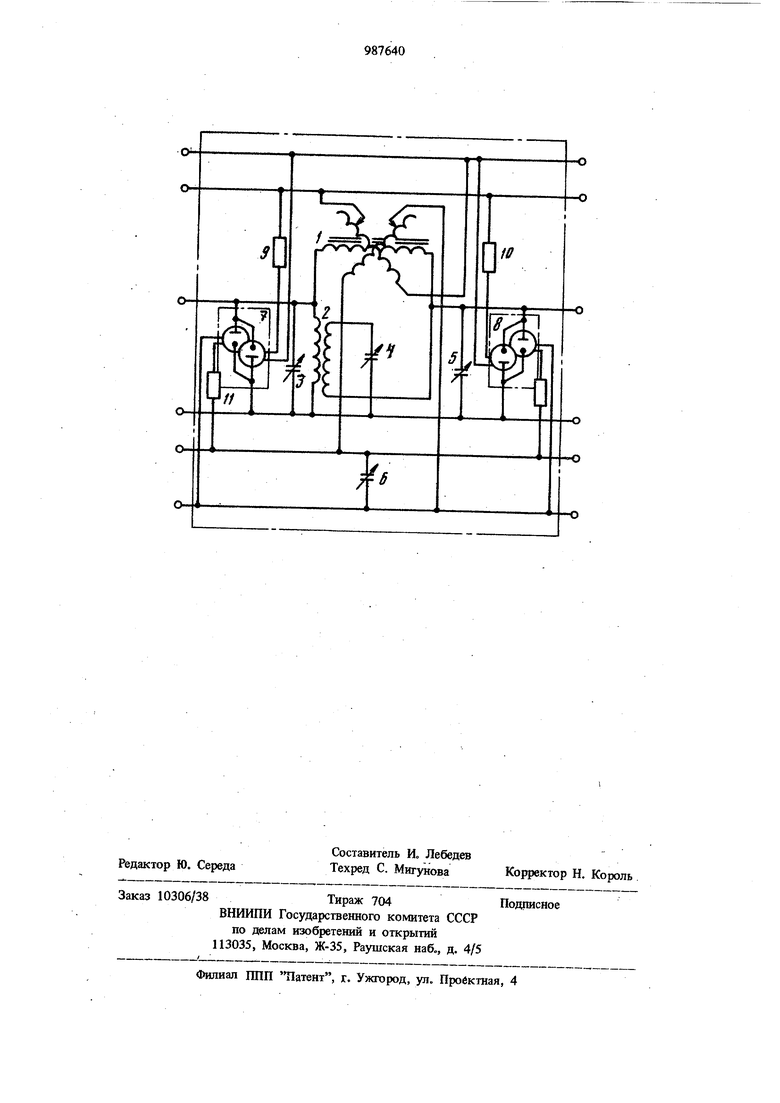
20 третьей паре полюсов отображения изгибающего момента и угловой скорости на одном конце моделируемого участка стержня, одни вьшоды вторичной обмотки трансформатора и третьего 3987 шунтирующего конденсатора объединены, а , другие их выводы соответственно соединены с вьтодами четвертого шунтирующего конденсатора и подключены к четвертой паре полюсов отображения изгибающего момента и угловой скорости на другом коще моделируемого участка стержня, причем пятая пара полюсов отображения перерезывающей свлы и поперечной скорости на одном конце моделируемого участка стержня соответственно соединена с шеетой парой полюсов отображения перерезьшающей СЩ1Ы и поперечной скорости на другом конце моделируемого участка стержня, дополнительно введены синусно-косинусный трансформатор, два регулируемых двухполярных ограничителя напряжения и согласующие резисторы, причем вьшоды статорной обмотки синусно-к синусного трансформатора соединены соответственно с одними полюсами третьей и четвертой пар полюсов отображения изгибающих моментов и угловых скоростей на концах моделируемого участка стержня, вьшоды первой квадратурной обмотки синусно-косинусного трансформатора соответственно соединены с первой парой полюсов отображения продольной силы и продольной скорости на одном конце моделируемого участка стержня, а вьшоды второй квадратурной обмотки синусно-косинусного трансформатора соответственно соединены с пятой парой полюсов отображения перерезывающей силы и поперечной скорости на одном конце моделируемого участка стержня, причем первый и второй управляющие входы обоих регулируемых двухполярных ограничителей напряжения через соответствующие согласующие резисторы соединены соответственно с первой и пятой парой полюсов отображения продольной и перерезьтающей сил, продольной и поперечной Скоростей на одном конце моделируемого участка стержня, а вьюоды регулируемых дивухполярных ограничителей напряжения соеди йены соответственно с третьей и четвертой парой полюсов отображения изгибающих моментов и утловых скоростей на концах моделируемого участка стержня. На чертеже изображена схема предлагаемого устройства. Устройство содержит синусно-косинусный трансформатор 1 с двумя квадратурными и одной статорной обмоткой, трансформатор 2, шун тирующие конденсаторы 3-6, два управляемых двухполярных ограничителя напряжения 7 и 8 и согласующие резисторы 9-12. Устройство работает следующим образом. При сложно-напряженном состоянии в сечении невесомого стержня, работающего в упругопластической стадии, действует изгибающий момент М и угловая скорость i/, перерезьшаюшая сила Q и поперечная скорость у,-продольная сила N и продольная скорость х. Модель состоит из двенадцатиполюсника, выполненного в виде трех пассивных четырехполюсников, к полюсам первого из KOTOpf ix подключена регулируемая первая квадратурная обмотка трансформатора 1, и является эквиваентом Q и у. Второй четырехполюсник, эквивалент М и Ч имеет трансформатор 2, три одинаковых конденсатора переменной емкости 3-5, связанные со статорной обмоткой трансформатора 1 и управляемые ограничители 7 и 8 напряжения, входы управления которых через резисторы 9-12 соединены с первым и третьим четырех полюсникамио Коммутация элементов четырехполюсника обеспечивает распределение напряжений и токов на полюсах в соответствии с зависимостями для изгибающих моментов и угловых скоростей на концах стержня. Третий четырехполюсник, включающий конденсатор переменной емкости 6 и вторую регулируемзто квадратурную обмотку трансформатора 1, является эквивалентом N и х. При работе модели в пределах упругой стадии, зшравление ограничителями 7 и 8 напря жения не оказьшает влияния на распределение напряжений и токов в цепях второго че тырехполюсника. При работе модели в пределах, эквивалентных пластической стадии, ограничители 7 и 8 напряжений ограничивают верхний и нижний максимальные пределы напряжений второго четырехполюсника в зависимости от величины напряжений, первого и третьего четырехполюсников. Эта зависимость обеспечивается тем, что при увеличении или уменьшении напряжений в первом и третьем четырехполюсниках через сопротивления 9-12 на входы зшравления ограничителей напряжения подаются напряжения с обратным знаком. Устройство предназначено для исследования работы стержня при переходных режимах и пря полигармонических колебаниях, в связи с этим велищшы изгибающих моментов М в сечениях стержня имеют знакопеременные значения. Для изменения параметров моделируемого стержня емкость конденсаторов и первичные обмотки трансформатора 1 имеют возможность регулировки. Предлагаемое устройство обеспечивает моделирование работы невесомого стержня при сложно-напряженном состоянии, обеспечивает моделирование работы невесомого стержня не только Е упругой, но и в пластической стадии, а также обеспечивает моделирование работы невесомого стержня с различными параметрами длины, изгибной жесткости и поперечного сечения. Устройство обеспечивает создание специальных аналоговых вычислительных машин по первой системе электромеханических аналогий.
Формула изобретения
Устройство для моделирования невесомого сложно-напряженного стержня, содержащее четыре шунтирующих конденсатора и трансформатор, причем вывода 1 первого шунтирующего конденсатора соответственно соединены с вой парой полюсов отображения продольной , . снлы и продольной скорости на одном конце моделируемого участка стержня, соответственно соединенных с второй парой полюсов отображения продольной силы и продольн( скорости на другом конце моделируемого уЧастка стержня, выводы первичной обмотки трансформатора соединены соответственно с вьшодами второго шунтирующего конденсатора и подключены ,к третьей паре полюсов отобра- 20 жения изгибающего угловой скорости на одном конце моделируемого участка стержня одни вьшоды вторичной обмотки трансформатора и третьего шунтирзгющего конденсатора объединены, а другие их выводы соответственно 2S соединены с выводами четвертого шунтирующего конденсатора и подключены к четвертой паре . полюсов отображения изгибающего момента и угловой скорости на одном конце модели уемого участка стержня, пятая пара полюсов зо отображения перерезывающей снлы и поперечной
скорости на одном конце моделируемого участка
стержня соответственно соединена с шестой парой полюсов отображения перерезывающей силы и поперечной скорости на другом конце модепируе- ,мого участка стержня, отличающееся
тем, что, с целью расишрення. функциональных возможностей за счет учета взаимосвязи сил и моментов как при упругой, так и nj пластической деформации стержня, в него дополнительНО введены синусно-коотнусный трансформатор, лэа регулируемых двухполярных ограничителя напряжения и согласующие резисторы, причем выводы статорной обмоткн синусно-косинусного трансформатора соединены соответственно с одними полюсами третьей и четвертой бар полюсов отображения изгибающих моментов и угловых .скоростей на концах моделируемого участка стержня, выводы пе{той квадратурной обмотки окиусно-косинусного трансформатора соответственно соединены с первой парой полюсов отображения продольной ошы и продольной скорости на одном конце моделируемого участка стерхош, а выводы второй квадратурной обмотки синусно-косинусного трансформатора соответственно соединены с пятой парсж полюсов отображения перерезьгаающей силы и
поперечной скорбсти на одном конце моделируемого участка стержня, первый и
второй управляющие входы обоих регулируемых двухполярных ограничителей напряжения через соответствующие сотпасующия резисторы соединены соответственно с первой и пятой парой полюсов отображения продольной н перерезываюо сил, продольной и поперечной скоростей на одном конце моделируемого участка стержня, а выводы регулируемых двухполярных ограшчителей напряжения соединены соответственно с третьей и четвертой парой полюсов отображения изгибающих моментов и угловых скоростей на концах моделируемого участка стержня,
информации, принятые во внимание при экспертизе 1 о Авторское свидетельство СССР № 646352, кл. G 06 G 7/68, 1976.
2. Тетельбаум И. М. Электрическое модеирование изгибных колебаний и метод дина4 иеских жесткостей. М., ОбороНгиз, 1949, , 22, фиг. 276 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделированияКОльцЕВОй СТРОиТЕльНОй КОНСТРуКции | 1978 |
|
SU809246A1 |
| Устройство для моделирования невесомого сложно-напряженного стержня | 1976 |
|
SU646352A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ СВЯЗАННЫХ^, | 1967 |
|
SU190095A1 |
| БЕСКОНТАКТНЫЙ СИНУСНО-КОСИНУСНЫЙ | 1973 |
|
SU373821A1 |
| Синусно-косинусный вращающийся трансформатор | 1989 |
|
SU1690108A1 |
| Устройство для определения точности вращающегося трансформатора | 1975 |
|
SU565354A1 |
| Вентильный электродвигатель | 1988 |
|
SU1573508A1 |
| Устройство для измерения погрешности синусно-косинусного поворотного трансформатора | 1982 |
|
SU1056253A2 |
| Двухканальный индукционный датчик угла | 1985 |
|
SU1316068A1 |
| Способ моделирования биологических условий невесомости и устройство для его осуществления | 1988 |
|
SU1675166A1 |