Изобретение относится к имитации кос- мических условий, в частности к лабораторному оборудованию для изучения действия факторов космического полета, и может быть использовано для наземного моделирования биологических условий невесомости.
Целью изобретения является повышение достоверности моделирования путем исключения воздействия на биообъект маг- нитобиологических эффектов.
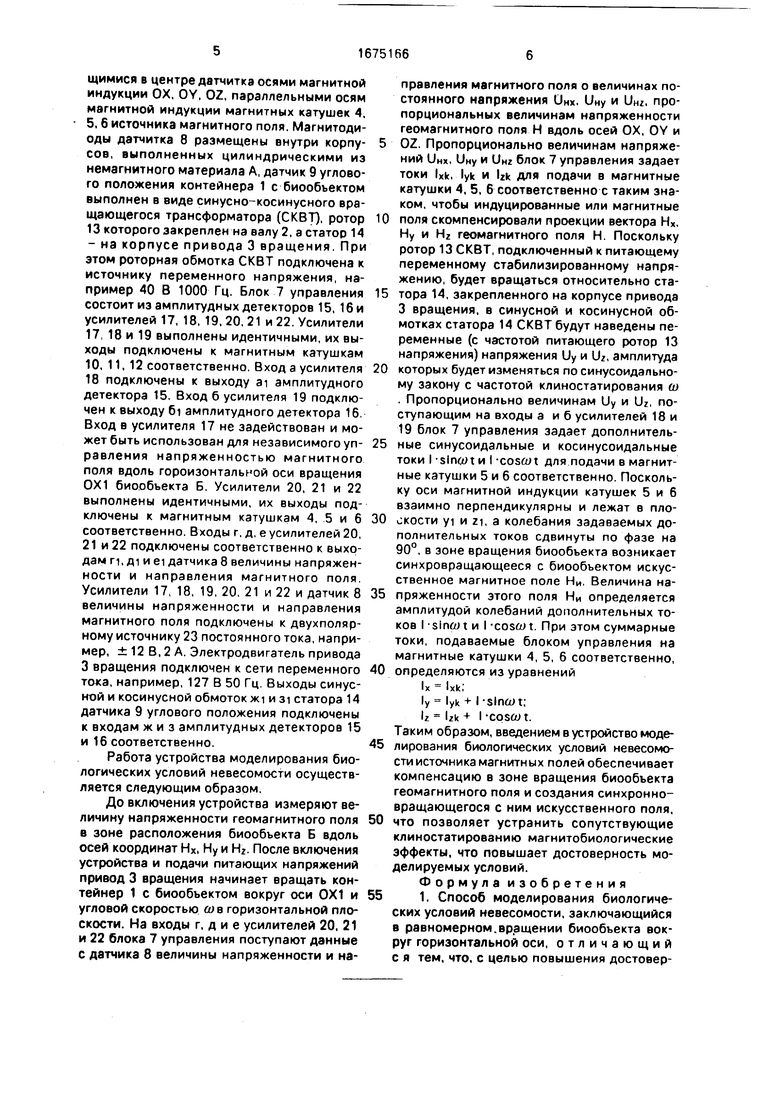
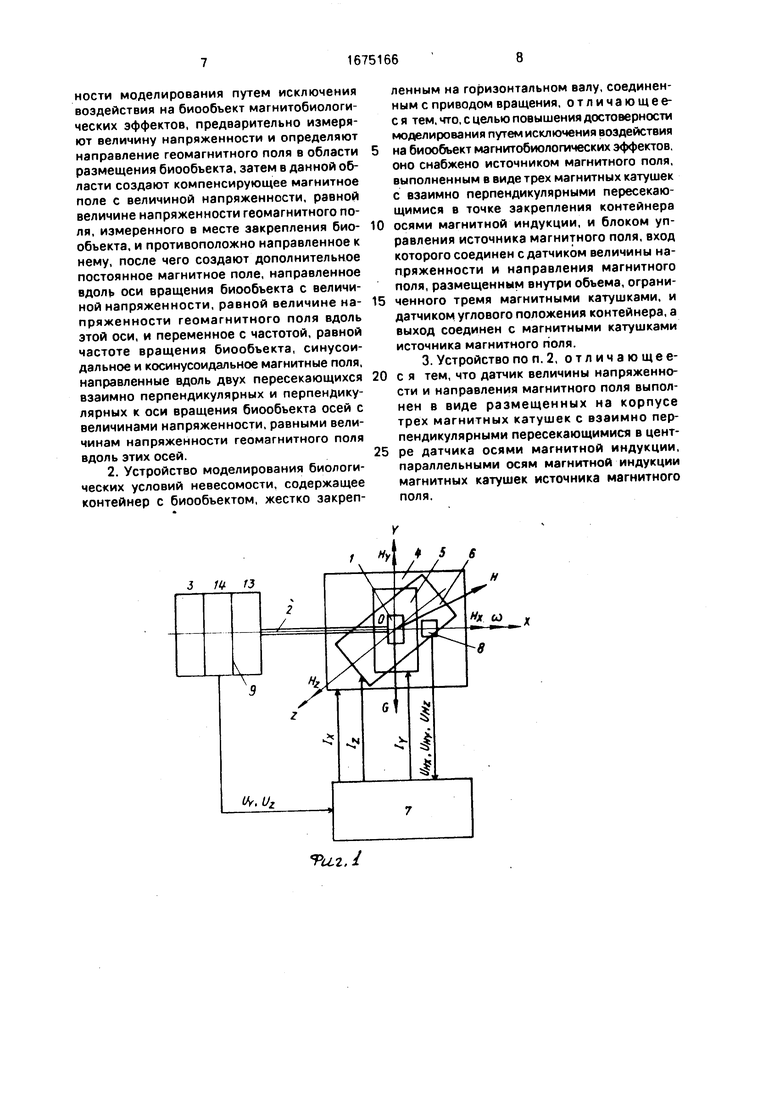
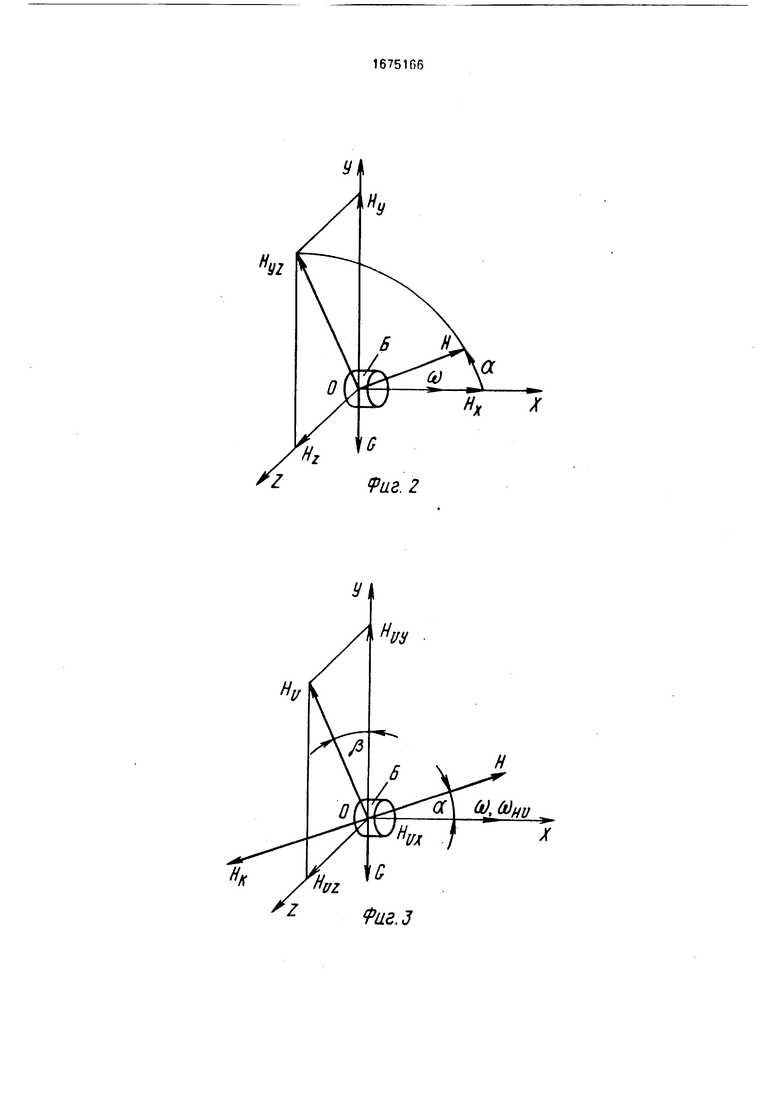
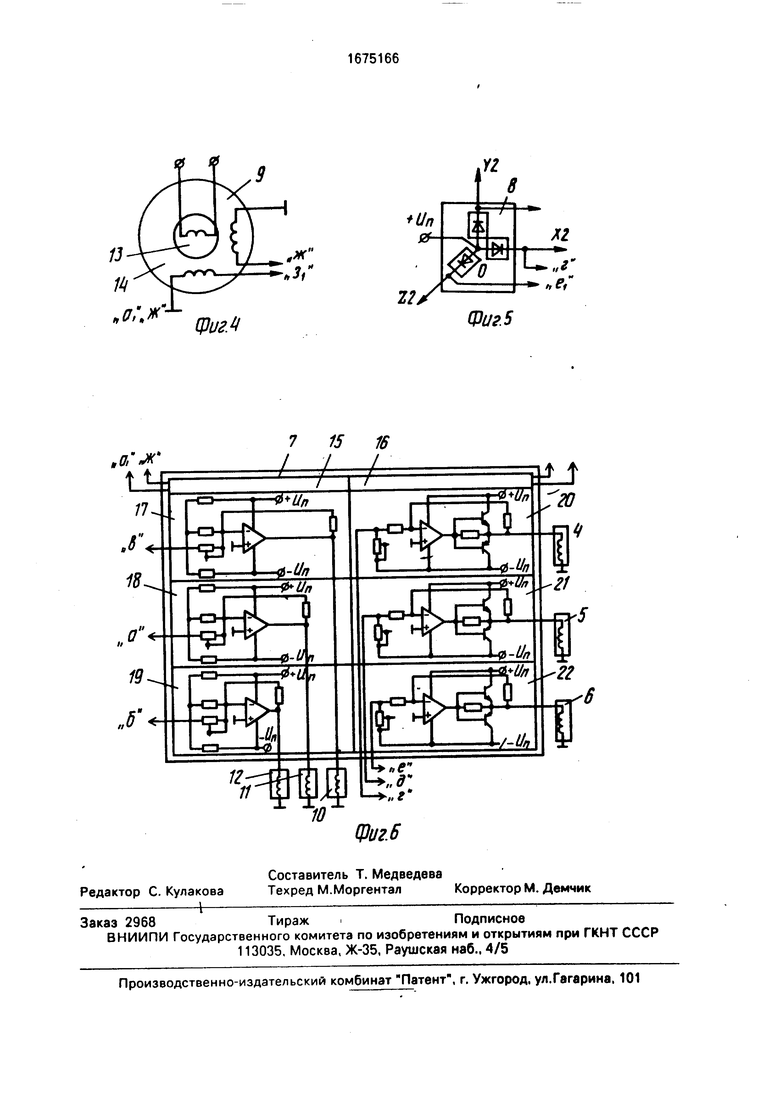
На фиг. 1 представлена функциональная схема устройства моделирования биологических условий невесомости; на фиг. 2 - изменение напряженности геомагнитного поля вдоль осей системы координат, жестко связанной с биообъектом Б; на фиг. 3 - изменение напряженности магнитного поля вдоль осей системы координат, жестко связанной с биообъектом Б; на фиг. 4 - выполнение датчика углового положения контейнера с биообъектом; на фиг. 5 - схема выполнения датчика величины напряженности и направления магнитного поля; на фиг. 6 - функциональная схема блока управления.
Сущность способа моделирования биологических условий невесомости заключается в следующем.
Биообъект Б при его вращении на кли- ностате с угловой скоростью О) произвольно ориентирован относительно вектора Н, при этом угол а между горизонтальной осью вращения клиностата ОХ и вектором Н не равен нулю и напряженность будет иметь три проекции вектора Н на оси OX, OY и OZ, соответственно, Нх, Ну, Hz. Ну - проекция вектора Н на плоскость OYZ. Проекция Нх будет постоянной, а Ну и Hz - переменные, уменьшающиеся во времени t по гармоническому закону с частотой клиностатирова- ния а)
Нх H-cosa ; since -sintot;
Hz H -slna -cos ал.
Наличие переменных составляющих напряженности геомагнитного поля Ну и Hz вызывает возникновение сопутствующих клиностатированию магнитобиологических эффектов. Чтобы исключить их влияние на биообъект, создают компенсирующее магнитное поле с величиной напряженности Нк, равной величине напряженности Н геомагнитного поля, предварительно измеренного в,месте закрепления биообъекта, и противоположно направленное к нему, затем создают дополнительное постоянное магнитное поле, направленное вдоль оси вращения объекта с величиной напряженности Ни равной величине напряженности
0
Н геомагнитного поля вдоль этой оси, и переменные с частотой равной частоте вращения биообъекта ш синусоидальное и косинусоидальное магнитные поля, направленные вдоль двух пересекающихся взаим- ноперпендикулярных и перпендикулярных к оси вращения биообъекта осей с величинами напряженности, равными величинам напряженности геомагнитного поля вдоль
этих осей. При этом проекции вектора магнитного поля Ни на оси координат OX, OY и OZ будут Них, НИу и Ниг соответственно, при этом угол / между вектором Ни, лежащим в плоскости YOZ и осью OY. Благодаря обес5 печению равенства угловой скорости вращения биообъекта Б и угловой скорости вращения вектора магнитного поля Ни. проекции вектора Ни - НИу и Ниг будут постоянны, а проекция Них равна нулю, что является необходимым условием для устранения возникающих при клиностэтировэ- нии сопутствующих магнитобиологических эффектов. При этом Них 0, Ниу Ни Ниг Ни sln/9 .
Устройство моделирования биологиie- ских условий невесомости, реализующее способ, содержит контейнер 1 с биообъектом, жестко закрепленным на горизонтальном валу 2, соединенным с приводом 3 вращения. Устройство содержит также источник магнитного поля, выполненный в виде трех магнитных катушек 4, 5, 6 с взаимно перпендикулярными пересекающимися в точке закрепления контейнера 1 осями магнитной индукции, совпадающими соответственно с осями OX, OY и OZ системы координат биообъекта, при этом ось магнитной индукции магнитной катушки 4 лежит в горизонтальной плоскости и совпадает с осью вращения био- объекта, а ось магнитной индукции магнитной катушки 5 совпадает с направлением действия силы тяжести G Геометрические размеры и форма магнитных катушек 4, 5, 6 определяются, в основном, требованиями к неоднородности создаваемых ими молей в зоне расположения биообъекта. Управление источником магнитных полей осуществляется блоком 7 управления, вход которого соединен с датчиком 8 величины напряженности и направления магнитного поля, размещенным внутри объема, ограниченного тремя магнитными катушками 4, 5, 6 и датчиком 9 углового положения контейнера 1, а вход соединен с обмотками магнитных
катушек 4, 5, 6. При этом датчик 8 величины напряженности и направления магнитного поля выполнен в виде размещенных на корпусе трех магнитных катушек 10, 11, 12 с
взаимно перпендикулярными пересекаю- 0
0
5
5
щимися в центре датчитка осями магнитной индукции OX, OY, OZ, параллельными осям магнитной индукции магнитных катушек 4, 5, 6 источника магнитного поля. Магнитоди- оды датчитка 8 размещены внутри корпу- сов, выполненных цилиндрическими из немагнитного материала А, датчик 9 углового положения контейнера 1 с биообъектом выполнен в виде синусно-косинусного вращающегося трансформатора (СКВТ), ротор 13 которого закреплен на валу 2, а статор 14 - на корпусе привода 3 вращения. При этом роторная обмотка СКВТ подключена к источнику переменного напряжения, например 40 В 1000 Гц. Блок 7 управления состоит из амплитудных детекторов 15, 16 и усилителей 17, 18, 19, 20, 21 и 22. Усилители 17, 18 и 19 выполнены идентичными, их выходы подключены к магнитным катушкам 10, 11, 12 соответственно. Вход а усилителя 18 подключены к выходу ai амплитудного детектора 15. Вход б усилителя 19 подключен к выходу 6i амплитудного детектора 16. Вход в усилителя 17 не задействован и может быть использован для независимого уп- равления напряженностью магнитного поля вдоль гороизонтальной оси вращения 0X1 биообъекта Б. Усилители 20, 21 и 22 выполнены идентичными, их выходы подключены к магнитным катушкам 4, 5 и 6 соответственно. Входы г, д, е усилителей 20, 21 и 22 подключены соответственно к выходам п, Д1 и ei датчика 8 величины напряженности и направления магнитного поля. Усилители 17, 18, 19, 20, 21 и 22 и датчик 8 величины напряженности и направления магнитного поля подключены к двухполяр- ному источнику 23 постоянного тока, например, ±12 В, 2 А. Электродвигатель привода 3 вращения подключен к сети переменного тока, например, 127 В 50 Гц. Выходы синусной и косинусной обмоток Ж1 и 31 статора 14 датчика 9 углового положения подключены к входам ж и з амплитудных детекторов 15 и 16 соответственно.
Работа устройства моделирования биологических условий невесомости осуществляется следующим образом.
До включения устройства измеряют величину напряженности геомагнитного поля в зоне расположения биообъекта Б вдоль осей координат Нх, Ну и Н2. После включения устройства и подачи питающих напряжений привод 3 вращения начинает вращать контейнер 1 с биообъектом вокруг оси 0X1 и угловой скоростью (ов горизонтальной плоскости. На входы г, д и е усилителей 20, 21 и 22 блока 7 управления поступают данные с датчика 8 величины напряженности и направления магнитного поля о величинах постоянного напряжения UHX. UHy и UHZ, пропорциональных величинам напряженности геомагнитного поля Н вдоль осей OX, OY и OZ. Пропорционально величинам напряжений UHX, UHy и UHZ блок 7 управления задает токи Ixk, lyk и Izk для подачи в магнитные катушки 4, 5, 6 соответственно с таким знаком, чтобы индуцированные или магнитные поля скомпенсировали проекции вектора Н. Ну и Н2 геомагнитного поля Н. Поскольку ротор 13 СКВТ, подключенный к питающему переменному стабилизированному напряжению, будет вращаться относительно статора 14, закрепленного на корпусе привода 3 вращения, в синусной и косинусной обмотках статора 14 СКВТ будут наведены переменные (с частотой питающего ротор 13 напряжения) напряжения Uy и Uz, амплитуда которых будет изменяться по синусоидальному закону с частотой клиностатирования ш . Пропорционально величинам Uy и Uz, поступающим на входы а и б усилителей 18 и 19 блок 7 управления задает дополнительные синусоидальные и косинусоидальные токи I -sincot и I -cosftH для подачи в магнитные катушки 5 и 6 соответственно. Поскольку оси магнитной индукции катушек 5 и 6 взаимно перпендикулярны и лежат в плоскости yi и zi, а колебания задаваемых дополнительных токов сдвинуты по фазе на 90°, в зоне вращения биообъекта возникает синхровращающееся с биообъектом искусственное магнитное поле Ни. Величина напряженности этого поля Ни определяется амплитудой колебаний дополнительных токов I -sinftH и I -coso t. При этом суммарные токи, подаваемые блоком управления на магнитные катушки 4, 5, 6 соответственно, определяются из уравнений
Ix Ixk;
ly lyk + I -slnon;
Iz Izk + I -COSO t.
Таким образом, введением в устройство моделирования биологических условий невесомости источника магнитных полей обеспечивает компенсацию в зоне вращения биообъекта геомагнитного поля и создания синхронно- вращающегося с ним искусственного поля, что позволяет устранить сопутствующие клиностатированию магнитобиологические эффекты, что повышает достоверность моделируемых условий.
Формула изобретения 1. Способ моделирования биологических условий невесомости, заключающийся в равномерном.вращении биообъекта вокруг горизонтальной оси, отличающий с я тем, что, с целью повышения достоверности моделирования путем исключения воздействия на биообъект магнитобиологи- ческих эффектов, предварительно измеряют величину напряженности и определяют направление геомагнитного поля в области размещения биообъекта, затем в данной области создают компенсирующее магнитное поле с величиной напряженности, равной величине напряженности геомагнитного поля, измеренного в месте закрепления био- объекта, и противоположно направленное к нему, после чего создают дополнительное постоянное магнитное поле, направленное вдоль оси вращения биообъекта с величиной напряженности, равной величине на- пряженности геомагнитного поля вдоль этой оси, и переменное с частотой, равной частоте вращения биообъекта, синусоидальное и косинусоидальное магнитные поля, направленные вдоль двух пересекающихся взаимно перпендикулярных и перпендикулярных к оси вращения биообъекта осей с величинами напряженности, равными величинам напряженности геомагнитного поля вдоль этих осей.
2. Устройство моделирования биологических условий невесомости, содержащее контейнер с биообъектом, жестко закрепленным на горизонтальном валу, соединенным с приводом вращения, отличающее- с я тем, что, с целью повышения достоверности моделирования путем исключения воздействия на биообъект магнитобиологических эффектов, оно снабжено источником магнитного поля, выполненным в виде трех магнитных катушек с взаимно перпендикулярными пересекающимися в точке закрепления контейнера осями магнитной индукции, и блоком управления источника магнитного поля, вход которого соединен сдатчиком величины напряженности и направления магнитного поля, размещенным внутри объема, ограниченного тремя магнитными катушками, и датчиком углового положения контейнера, а выход соединен с магнитными катушками источника магнитного поля.
3. Устройство по п.2, отличающее- с я тем, что датчик величины напряженности и направления магнитного поля выполнен в виде размещенных на корпусе трех магнитных катушек с взаимно перпендикулярными пересекающимися в центре датчика осями магнитной индукции, параллельными осям магнитной индукции магнитных катушек источника магнитного поля.
Изобретение относится к имитации космических условий, в частности к лабораторному оборудованию для изучения действия факторов космического полета, и может быть использовано для наземного моделирования биологических условий невесомости. Целью изобретения является повышение достоверности моделирования путем исключения воздействия на биообъект маг- нитобиологических эффектов. Способ моделирования биологических условий невесомости заключается в предварительном измерении величины напряженности Н и определении направления геомагнитного поля в области размещения равномерно вращающегося с угловой скоростью ш биообъекта вокруг горизонтальной оси, затем в данной области создают компенсирующее магнитное поле с величиной напряженности Hk, равной величине напряженности геомагнитного поля, измеренного в месте закрепления биообъекта, и противоположно направленное к нему, после чего создают дополнительное постоянное магнитное поле, направленное вдоль оси вращения биообъекта с величиной напряженности Ни, равной величине напряженности геомагнитного поля вдоль этой оси, и переменные с частотой с)м.равной частоте вращения биообъекта, синусоидальное и косинусоидаль- ное магнитные поля, направленные вдоль двух пересекающихся взаимно перпендикулярных и перпендикулярных к оси вращения биообъекта осей с величинами напряженности НИу и Ни/, равными величинам напряженности геомагнитного поля вдоль этих осей. Устройство моделирования биологических условий невесомости содержит контейнер 1 с биообъектом, жестко закрепленным на горизонтальном валу 2, соединенным с приводом 3 вращения. Устройство содержит также источник магнитного поля, выполненный в виде трех магнитных катушек 4,5, 6 с взаимно перпендикулярными пересекающимися в точке закрепления контейнера 1 осями магнитной индукции, Управление источником магнитных полей осуществляется блоком 7 управления, вход которого соединен с датчиком 8 величины напряженности и направления магнитного поля, размещенным внутри объема, ограниченного тремя магнитными катушками 4, 5, 6 и датчиком 9 углового положения контейнера 1, а выход соединен с обмотками магнитных катушек 4, 5,6. При этом датчик 8 величины напряженности и направления магнитного поля выполнен в виде размещенных на корпусе трех магнитных катушек с взаимно перпендикулярными пересекающимися в центре датчика осями магнитной индукции, параллельными осям магнитной индукции магнитных катушек 4, 5, 6 источника магнитного поля. 2 с., 1 з. п. ф-лы. 6 ил. ё ON XI СЛ сЈ О
Фи.г.1
5 S
ft
У2
Ht
U
Фиг.1
t
Фиг. 5
| Справочник по космической биологии и медицине | |||
| Под ред | |||
| А.И | |||
| Бурназянг, О.Г | |||
| Га- зенко | |||
| М.: Медицина, 1983, с 109 - 110. |
