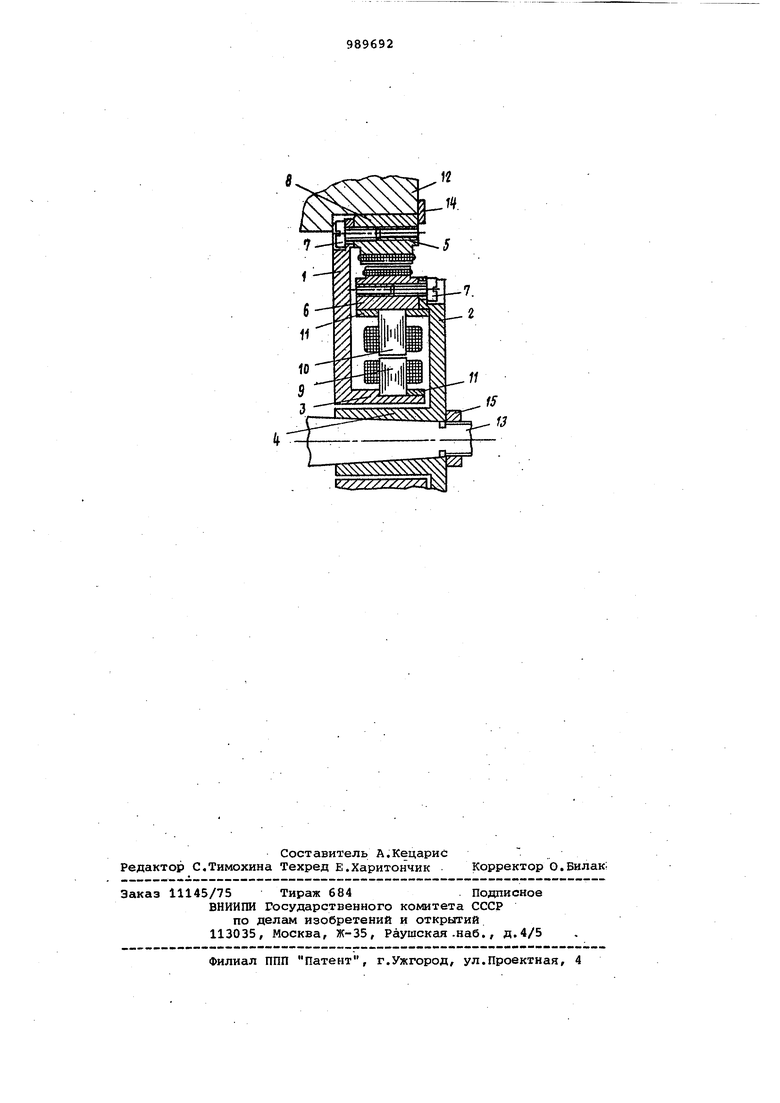
Изобретение относится к измеритёл («ой й- вычислительной технике и предназначается для получения точной (до единищл угловых секунд) информации об угловсм положении рассматриваемо объекта, на котором датчик установлен. Известны конструкции индукционных электрических машин - вращаю1даеся трансформаторы (ВТ) - с числом пар полюсов, равным единице, которые, по величине отношения их выходных напряжений позволяют получить информадаю об угловом положении их ротора с точностью до i3 угловых минут tH Многополюсные ВТ имеют точность 10 - 18 угловых секунд. Одшако в этом случае однозначная информация о угловом положении ротора возможна только в пределах ровЪрота вала, соответствующего двум полюсным делениям. Для устранения неоднозначности информации дйухполюсный и многополюс ный ВТ устанавливаются с помощью муфт на одном валу, образуя систему (каналы) точного отсчета (ТО) и грубого, отсчета (rf). Однако такое устройство обладает рядом существенных недостатков - большимГабаритом и весом, потерей.точности из-за соединительных куфт и сложной системы взаимной выставки ТО и ГО. Наиболее близко к предлагаемому двухканальное устройство в виде .плоского датчика угла, в кот9вом ВТ грубого и точного отсчетов выполнены на отдельных магнитопроводах, установленных на двух взаимно вращающихся обоймах Г21. В этой конбтрукции крепление пакетов магнитопроводов ВТ точного и грубого отсчетов осуществляется традиционным способом, когда они устанавливаются в цилиндричес кие отверстия корпуса или сажаются на цилиндрические выступы обойм. При этом с целью исключения деформа1у1И магнитотфоводов их установка производится по свободной посадке с гарантированным зазором величиной 10-20 мкм. Вследствие наличия указанных зазоров, а также неизбежных технологических эксцентриситетов между Посадочн1лми поверхностями обойм, одни из которых предназна.чешл для установки магнитопроводов ВТ, а другие служат для установки самих обойм на объект, в конструкции прототипа имеет место неравномерность рабочего зазора датчика ТО и ГО порядка 30-50 мкм. Эта неравномерность имеет характер эксцентриситета и биения рабочих поверхностей ТО и ГО, что приводит к дополнительным Погрешностям ; при списывании угловых положений. В наиболее точных многополпсных датчиках ТО с ошибкой Измерения f10-18 угловых секунд дополнительная погрешность от указанных значений эксцентриситета и биения составляет ± 5 угловых секунд и более. В настоящее время требуются датчи ки с ошибкой измерения ± 5 угловых се кунд и менее, поэтому задача повышения их точности является актуальной, Помимо недостаточной точности в прототипе может иметь место нестабильность его показаний при воздейст вии на него как механических (удары, вибрации) так и климатических (холод, тепло) факторов. Это объясня ется конструктивной нестабильностью устройства из-за возможности взаимных смещений магнитопроводов при их свободных посадках и нежестуIM закреплением магнитопроводов в обоймах Целью изобретения является повышение точности и стабильности двухканального датчика угла. Эта цель достигается тем, что в плоском двухканальном датчике угла. содержащем вращающиеся датчики грубо го и точного отсчета, выполненные на отдельных магнитопроводах и установленные на двух вращающихся одна относительно другой обоймах, обоймы датчика выполнены в виде цилиндрических фланцев (диск с одним цилиндрическим выступом), на торцовых поверхностях которых установлены и закреплены (например, с помош.ью винтов и штифтов) нешихтованные магнитопроводы статора и ротора датчика точного отсчета, а ротор датчика грубого отсчета установлен на внутренней цилиндрической поверхности ротора датчика точного отсчета. На чертеже схематически представлено предлагаемое устройство. Обоймы 1 и 2 списывающего устройс ва выполнены в виде двух фланцев с цилиндрическими выступами 3 и 4. Ста тор 5 и ротор б датчика ТО выполнены из сплошного (нешихтованного) магнитомягкого материала и установлены на обоймах 1 и 2 с помощью торцового крепления. На чертеже показан один из вариантов крепления, когда статор 5 и ротор 6 своими торцовыми поверхностями крепятся к торцовым поверхностям соответствующих обойм 1 и 2 с помощью винтов 7 и штифтов 8. Статор 9 и ротор 10 ГО выполнены из ших тованного магнитомягкого материала. Ротор 10 ГО установлен во внутреннем цилиндрическом отверстии ротора ТО,, статор 9 ГО - на наружной цилиндрической поверхности выступа 3 обоймы 1. В обоих случаях применена свободная посадка с зазором 10-20 мкм. Крепление статора 9 и ротора 10 осудествлено с помощью прижимных колеи 11,. На. чертеже приведенвозможный вариант установки плоского двухканального датчика угла на корпусе 12 и валу 13 объекта измерения. Для установки неподвижной обоймы 1 в посадочное цилиндрическое отверстие корпуса 12 используется наружная цилиндрическая поверхность статора 5. ТО. При этом предусматривается паспортизованная посадка с зазором 15 мкм и закрепление с помощью накладок 14. Подвижная, обойма 2 устанавливается на конической поверхности вала 13 и -закрепляется гайкой 15. При работе датчика величина воздушного . зазора между цилиндрическими рабочими поверхностями статора 5 и ротора б ТО не будет одинаковой и постоянной при каждом положении ротора. Величина неравномерности воздушного зазора складывается из следующих составляющих: несоосности посадочной поверхности корпуса 12 объекта и посадочной конической поверхности вала 13; несоосности рабочей поверхности ротора 6 .ТО и посадочной конической поверхности выступа 4 oбoй 1Ы2; наличия зазора при посадке статора 5 ТО в посадочное отверстие корпуса 12; несоосности рабочей и посадочной поверхностей статора 5 ТО. Использование торцового крепления статора 5 и ротора 6 на обоймах 1 и 2 позволяет полностью исключить такие составляющие неравномерHocT i воздушного зазора, как свободные посадки магнитопроводов. ТО в обоймы с гарантированным зазором 10-20 мкм, что имело место в прототипе. Кроме того, в предлагаемой конструкции за счет выставки ротора б ТО на торцовой поверхности обоймы 2 с последующей фиксацией его винтами 7 и штифтами 8 уменьшается-до минимального значения 1-2 мкм такая составляющая неравномерности рабочего зазора, как несоосность рабочей поверхности ротора б ТО относительно посадочной конической поверхности выступа 4 обоймы 2. В предлагаемой конструкции суммарная величина неравномерности воздушного зазора ТО составляет 10-15 мкм./ в то время как в прототипе она составляет 30-50 мкм. При работе датчика не будет одинаковой и постоянной величина воздушного зазора между цилиндрическими рабочими поверхностями статора 9 и ротора 10 ГО. Величина неравномерности воздушного зазора складывается из несоосности посадочной поверхности
корпуса 12 объекта и посадочной поверхности вала 13, зазора в посадке статора 9 на выступе 3 обоймы 1, за.isopa в посадке ротора: 10 ГО в отверстии ротора б ТО, несоосности jga6o4HX и посадочных поверхностей статора 9 и ротора 10 датчика ГО. В предлагаемой конструкции расчет размерных цепей дает суммарную величину неравномерности воздушного зазора ГО 20-30 мкм в то время, как в прототипе она достигает 40-60 мкм
Уменьшение неравномерности воздушного зазора ГО в предлагаемом устройстве достигается благодаря механической выставке статора 5 и ротора 6 ТО по их нерабочим поверхностям относительно цилиндрической посадочной поверхности выступа 3 фланца обоймы 1 и конусной посадочной поверхности выступа 4 соответственно. Благодаря этому в предлагаемом устройстве отсутствуют несоосность посадочной поверхности выступа 3 относительно посадочной поверхности фланца обой1иы 1 и несоосность нерабочей поверхности ротора 6 относительно посадочной (конусной) поверхности обоймы 2. Оба достигнутых результата возкюжны только при наличии двух признаков предлагаемого устройства: .установки его обоймы 1 в корпусе 12 объекта по нерабочей поверхности статора 5 и установки ротора 10 ГО в обойму 2 непосредственно на нерабочую поверхность ротора 6 ТО.
В предлагаемом устройстве за счет торцового крепления статора и ротора ТО в отличие от прототипа значительно повышена жесткость конструкции. В этом случае исключена возможность смещения статора и ротора ТО при механических и климатических воздействиях, что в прототипе может произойти (как показывает практика) за счет посадки статора и ротора на .обоймы с гарантированным зазором.
Благодаря применению сплетиндго магнитопровода для статора и ротора повышается их жесткость, что гаран.тирует стабильность показаний устройства при изменении температуры окружающей среды.
Таким образом, за счет нешихтованной конструкции магнитопровода датчика ТО, их тоЕДОвого крепления, выставки и последующей фиксации статора и ротора ТО, а также за счет установки ротора датчика ГО непосредственно на магнитопроводе ротора ТО в значительной степени уменьшена неравномерность воздушного зазора между рабочими поверхностями датчиков ТО и ГО и повышена стабильность конструкции всего устройства.
Формула изобретения
Плоский двухканальный датчик угfia, содержащий вращающиеся датчики грубого и точного отсчета, выполненные на отдельных магнитопроводах и установленные на двух вращающихся одна относительно другой обоймах, отличающийся тем, что, с целью повышения точности и стабильности, обоймы датчика выполнены в виде цилиндрических фланцев, на внутренних торцовых поверхностях которых установлены своими торцовыми поверхностями и закреплены нешихтованные магиитопроводы статора и ротора датчика ТОЧ.НОГО отсчета,а ротор датчика грубого отсчета установлен на внутренней цилиндрической поверхност ротора точного отсчета.
Источники информации, принятые во внимание при экспертизе
1.Хрущев В.В. Электрические итакромашины автоматических устройств, л., Энергия, 1976, с. 248-256, 274-279..
2.Авторское свидетельство СССР W 177301, кл. G 08 С 1/00, 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многополюсный вращающийся трансформатор | 1976 |
|
SU653692A1 |
| Индукционный преобразователь угла | 1990 |
|
SU1723641A1 |
| Двухканальный вращающийся трансформатор | 1987 |
|
SU1467685A1 |
| Многополюсный вращающийся трансформатор | 1977 |
|
SU692012A1 |
| Устройство для двухканальной дистанционнойпЕРЕдАчи углА | 1979 |
|
SU851672A1 |
| Двухканальный бесконтактный датчик угловых перемещений | 1979 |
|
SU894347A1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2550379C1 |
| Двухканальный датчик угловыхпЕРЕМЕщЕНий | 1979 |
|
SU853377A2 |
| ДАТЧИК ПОЛОЖЕНИЯ | 2017 |
|
RU2654371C1 |
| Двухканальный датчик угла | 1972 |
|
SU473264A1 |