(5) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАГРУЗОЧНОГО МОМЕНТА ЭЛЕКТРОПРИВОДА
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 2000 |
|
RU2191106C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ РОБОТОМ | 2003 |
|
RU2230654C1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1530823A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 2001 |
|
RU2209718C2 |
| Электрогидравлический следящий привод | 1986 |
|
SU1399521A2 |
| Устройство для управления приводом робота | 1989 |
|
SU1754438A1 |
| Устройство для управления приводом робота | 1990 |
|
SU1782721A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2397529C2 |
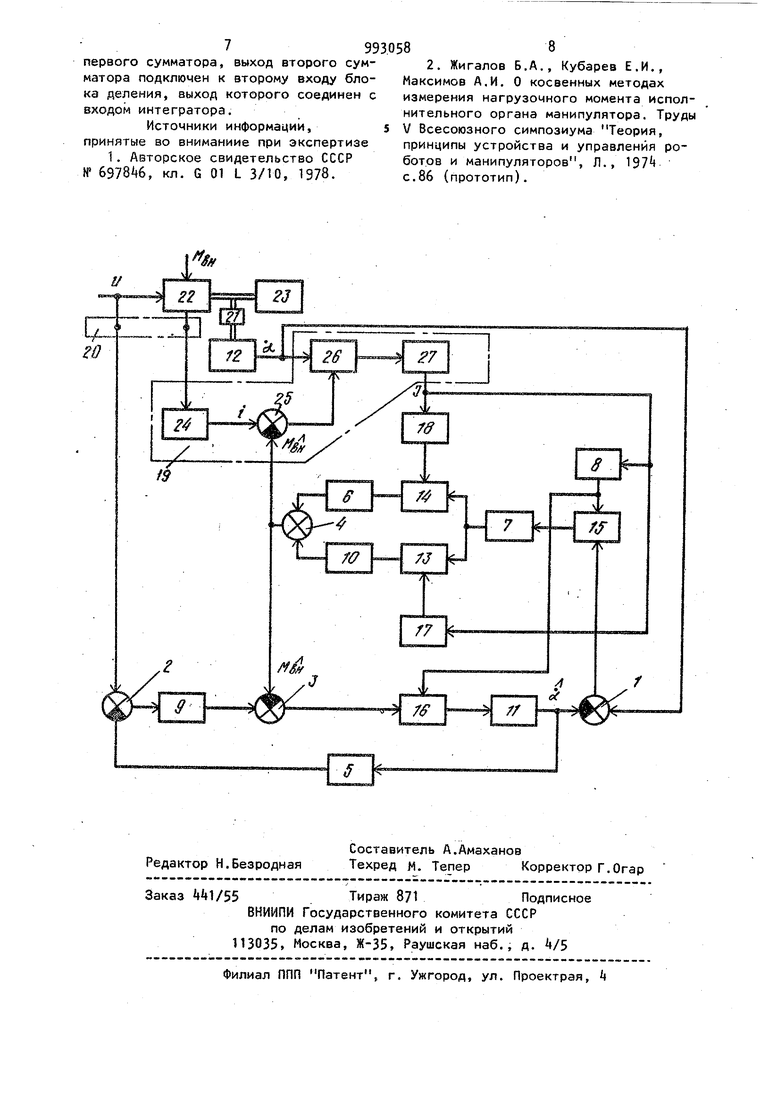
Изобретение относится к измерител ной технике и может быть использован для jg:ocBeHHoro измерения внешнего нагрузочного момента электропривода. Известно устройство для измерения нагрузочного момента электропривода, содержащее вычислитель, пропорционал ный элемент и датчик скорости вращения р. . Однако известное устройство не обеспечивает требуемой точности измерения. Наиболее близким к предлагаемому по технической сущности является устройство для измерения нагрузочного мрмента электропривода, содержащее механический и электрические разъемы для подключения соответственно вала и обмоток испытуемого двигателя, пер.вый, второй, третий и четвертый сумматоры, первый, второй и третий усилители, первое и второе апериодические звенья, интегратор и датчик скорости, выход которого соединен с первым входом первого сумматора, вто-рой вход которого подключен к выходу интегратора и через первый усилитель к первому входу второго сумматора, второй вход которого подключен к первому входу электрического разъема, а выход через первое апериодическое звено подключен к первому входу третьего сумматора, второй вход которого соединен с выходом четвертого сумматора, ,к первому входу которого подключен выход второго апериодического звена, а ко второму - выход второго усилителя, причем датчик скорости соединен с механическим разъемом Г21 . К недостаткам такого устройства относится низкая точность измерения при изменении момента инерции нагрузки двигателя. Цель изобретения - повышение точности измерения при изменении момента инерции нагрузки двигателя. Указанная цель достигается тем, что в устройство дополнительно введе ны первый, второй и третий блоки умножения, блок деления, первый и второй нелинейные элементы, четвертый усилитель и блок вычисления момента инерции, первый вход которого связан с выходом датчика скорости, второй входс вторым входом электрического разъена, третий вход - с выходом четверто го сумматора, а выход через соответс вующие нелинейные элементы - с первы ми входами первого и второго блоков умножения и, кроме того, через четвертый усилитель - с первыми входами блока деления и третьего блока умножения, выход которого через третий усилитель связан со вторыми входами пёрйого и второго блоков умножения, выходы которых подключены соответст-венно ко входам втррого апериодического звена и второго усилителя, при этом второй вход третьего блока умножения соединен с выходом первого сумматора, выход, второго сумматора подключен к второму входу блока деления, выход которого соединен с входом HHTerpaTopav. На чертеже изображено предлагаемое устройство для измерения на.грузочного момента рлэктропривода. Устройство содержит первый 1, вто рой 2, третий 3 и четвертый сумматоры, первый 5) второй 6, третий 7 и четвертый 8 усилители, первое 9 и второе 10 апериодические звенья, интегратор 11, датчик 12 скорости, первый 13, второй Ik и третий 15 бло ки. умножения, блок 16 деления, первый 17 и второй 18 нелинейные элемен ты, блок 19 вычисления момента инерции, электрический 20 и механический 21разъемы, к которым подключены соответственно обмотки и вал двигателя 22. К валу двигателя 22 присоединена внешняя нагрузка 23 с изменяющимся моментом инерции. Блок вычислений инерции содержит датчик 24 тока, сумматор 25, делитель 26 и интегратор 27. Вход датчика 12 скорости через ме ханический разъем 21 подключен к валу испытуемого двигателя 22. Выход датчика 12 скорости соединен с первы входом блока 19 вычисления момента инерции и с первым входом первого су матора 1, второй вход которого подключен к выходу интегратора 11 и че99384 рез первый усилитель к первому входу второго сумматора 2, второй вход которого подключен к первому входу электрического разъема 20, а выход через первое апериодическое звено 9 подключен к первому входу третьего сумматора 3 второй вход которого соединен с третьим входом блока 19 вы-г числения момента инерции и с выходом четвертого сумматора k, к первому вхо ду которого подключе+н выход второго апериодического звена 10, а к второму входу - выход второго усилителя 6. Второй в)од блока 19 вычисления момента инерции соединен с вторым входом электрического разъема 20, а выход через первый 17 и второй 18 нелинейные элементы связан соответственно с первыми входами первого 13 и второго 1k блоков умножения и, кроме того, через четвертый усилитель 8 - с первыми входами блокад 16 деления и третьего блока 15 умножения, выход которого через третий усилитель 7 связан со вторыми входами первого 13 и второго 1А блоков умножения, выходы которых подключены соответственно ко входам второго апериодического звена 10 и второго усилителя 6. Выход третьего сумматора 3 подключен к второму входу блока 16 деления, выход которого соединен с входом интегратора 11. Внутри блока 1.9 вычисления момента инерции второй вход через датчик 2k тока подключен к первому входу сумматора 25, выход которого подключен к второму входу делителя 26, выход которого через интегратор 27 соединен с выходом блока, первый вход связан с первым входом делителя 26, третий вход связан с вторым входом сумматора.25.., Структура устройства реализует фильтр Калмана с переменными парамет Нелинейные элементы 17 и 18, а также первый 13 и второй Ц блоки умножения являются цепями коррекции параметров фильтра Р и Rj соответственно. Эти цепочки реализуют нелинейные табулированные Функции вида |P2l(l)/P21 и P,-(|)/PI . Контур, состоящий из первого усилителя 5, второго сумматора 2, первого апериодического звена 9, третьего сумматора 3, блока 16 деления и интегратора 11, является электрической модёлью привода с переменным момектом иНерции нагрузки. Четвертый усилитель 8 имеет посто нный коэффициент усиления, равный 1/|ц, где I ц- номинальное значение величины момента инерции нагрузки 23 Устройство работает следующим об-; разом. Во время работы привода через элек рический разъем 20 с первого входа в устройство поступает в управляющее на пряжение, а с второго - ток якоря испытуемого двигателя 22. При этом датчик Л 2 с.кррости вырабатывает сигнал пропорциональный скорости вращения вала двигателя 22. На выходе блока 19 вычисления момента инерции появляется сигнал Г, пропорциональный текущей оценке величины момента инерции нагру ки 23 двигателя 22.;Этот сигнал посту пает на входы нелинейных элементов 17 и 18, а также на вход четвертого уси.лителя 8. На выходе четвертого усилителя 8 возникает сигнал 1 llu, который W-г поступаёт на первый вход третьего бло ка умножения 15 и на первый вход блок 16 деления, который является одним нз :входов электрическс модели привода. На другой вход этой модели (второй вход . L ляющее напряжение. На выходе модели (выход интегратора 11) вырабатывается сигнал пропорциональный оценке величины скорости вращения вала двигателя 22. На выходе первого сумматора 1 вырабатывается сигнал рассогласования величины оценки скорости- с измеренной величиной скорости. Этот сигнал поступает на второй вход третьего блока 15 умножения, где.его величина корректируется в зависимости от величины момента инерции нагрузки и далее. Через третий усилитель 7, сигиал поступает на первый 13 и второй l4 блоки умножения, которые яв ляются элементами цепей коррекции параметров R, и Р фильтра. Выходом фильтра является выход чет вертого сумматора Ц. Выходным сигналом фильтра является оценка величины нагрузочного момента} . Этот сигнал кроме того, поступает на третий вход блока 19 вычисления момента инерции и на второй вход третьего сумматора 3, являкщегося одним из входов электрической модели привода. Предлагаемое устройство позволяет повысить точность измерения нагрузочного момента приводов с нагрузкой, имеющей переменный момент инерции, например в приводах исполнительных органов промышленных роботов. Формула изобретения Устройство для измерения нагрузочного момента электропривода, содержащее механический и электрический разъемы для подключения соответственно вала и обмоток испытуемого дайгаг теля, первый, второй, третий и метвертый сумматоры, первый, второй и третий усилители, первое и второе апериодические звенья, интегратор и датчик скорости, выход которого соеди нен с первым входом первого сумматора, второй вход которого подключен к выходу интегратора и через первый усилитель к первому входу второго сумматора, второй вход которого подключен к первому входу электрического разъема, а выход через первое апериоразъема, а выход через п ,..;... н° стерпи дическое звено подключен к первому входу третьего сумматора, второй вход которого соединен с выходом чет&ёр того сумматора, к первому входу kOToподключен выход второго апериодическо о звена, а к второму входу выход второго усилителя, причем датчик скорости соединен с механич.еским разъемом, о т л и ч а ю щ е е с я тем, что, с целью повышения точности измерения при изменении момента инерции нагрузки двигателя, в него дополни-гельно введены первый, второй и третий блоки умножения, блок деления, первый и второй нелинейные элементы, четвертый усилитель и блок вычисления инерции, первый вход которого связан с выходом датчика скорости,, второй вход - с вторым входом электрического разъема, третий вход - с выходом четвертого сумматора, а выход через соответствующие нелинейные элементы - с первыми входами первого и второго .блоков умножения и, кроме того, через четвертый усйяит«ль - с первыми входами блока деления и третьего блрка уг« ожения, выход которого через третий усилитель связан с-.-вторыми входами первого и второго блоков умножения, выходы которых подключены соответственно к входам второго апериодического звена и второго усилителя, при этом второй вход третьего блока умножения соединен с выходом 799 первого сумматора, выход второго сумматора подключен к второму входу блока деления, выход которого соединен с входом интегратора. Источники информации, принятые во вниманиие при экспертизе 1. Авторское свидетельство СССР ff 697846, кл. G 01 L 3/10, 1978. 8 2. Жигалов Б.Д., Кубарев Е.И., Максимов А.И. О косвенных методах измерения нагрузочного момента исполнительного органа манипулятора. Труды V Всесоюзного симпозиума Теория, принципы устройства и управления роботов и манипуляторов. Л., 197 с.86 (прототип).
