(54) ДАТЧИК УГЛОЮГО ПОЛОЖЕНИЯ И СКОРОСТИ ВРАЩЕНИЯ
Изобретение относится к измерительной техшке и может быть исподьж)вано в качестве датчика углового положения и мгновенной скорости вращения вала в точных щсфровых системах автоматического управления и регулирования.
По основному, авт. св. № 934382 известен датчик золового положения и скорости вра- . щения, содержащий генератор импульсов, выход которого подключен к счетному входу первого счетчики, выход старшего разряда которого через формирователь опорных сипгалов соединен со входом фазовращателя, подключенного своим выходом ко входу нульоргана. Выход последнего соединен со входом разрешения записи первого регистра, информационные входа которого подключены к выходам соответствующих разрядов первого счетчика. Выход генератора импульсов соедннен такяж со счетным входом второго счётчика через ключ, управляняций вход которого соединен с выходом дополнительного триггера. Вход сброса зтого триггера соединен с
ВАЛА
выходом нуль-органа. Выход нуль-органа соединен также со входом формирователя задержанных импульсов, управляющего разрешением записи во второй регистр, а также с входом управления предустановкой второго счетчика и установкой в едшшчное состояние
дополнительного триггера. Информационные . входы второго регистра подключены к соответствующим выходам второго счетчика 1,
, Недостатком этого устройства является невозмояшость одновременного обеспечения в широком диапазоне изменения скорости вращения высокой точности измерения как углового положения, так и скорости вращения вала, так как для достижения минимальной погрещности определения углового положения необходима частота опорного сигнала фазовращателя значительно больщая, чем частота qnopного сигнала, при которой достигается мини20мум погреишости определения скорости вращения.
Относительная погрешность определения углового положения имеет две составляюихие. Пер- 3994988
вая составляющая «Л, связана с дискретностью измерений и определяется изменением углового положения за время между двумя соседними измерениями. Поскольку коды углового положения формир ются с .час1;отой онорного j сигнала, то
. Ь
где Fep - частота вращения вала};
TQ - нериод опорного сигнала. Вторая составляющая погрещности определения углового положения (йрвязана с ограниченной разрядностью кода углового положения и равна относительному весу младщего разряда кода, т.е.
г-1
()
где k - коэффициент пересчета счетчика-делителя частоты f генератора импульсов, причем k/f . С учетом выражений (1) и (2) суммарная относительная погрешность определения углового положения может быть записана в виде , --.-iViVi ;- Приравнивая к нулю производную всЛг/ Тд найдем оптимальное значение периода опорного сигяала TQ , при котором погрешность минимальна - ni -IfFnp При постоянной скорости вращения относительная погрешность определения скорости cf- также имеет две составляющие. Первая составляющая связана с отбрасыванием всех членов, кроме первого, в разложении частоты вращения в ряд Тейлора F -i.UALJ4l 2 «РТО Ьт, Что/Ч /-- где аТ - приращение периода выходного сигнала, равное модулю разности между пе риодами выходного и опорного сигналов фазовращателя (знаком плюс и минус соот ветствуют два противоположных направления вращения). Можно считать, что погрешность, связаннал с отбрасыванием членов ряда, определяется величиной первого отбора отбрасываемого члена. Эта оценка несколько завышен для случая знакопеременного ряда и заниж на для знакопостоянного ряда. Считаем, что
4Т
«Fnpl(fc)
Т
для первой составляющей погрешности определения скорости вращения сЛ можно записать следующее выражение
d
VoC)
L01
Вторая составляющая погрещности опреде,ления скорости вращения связана- с Iограниченной разрядностью кода скорости. Реально фиксируется не код скорости вращения, а пропорциональный ему код приращения периода дТ. Абсолютная погрешность определения л Т равна llf - периоду сигналов генератора импульсов.
Относительная погрешность определения дТ может быть записана в виде
XJ2
(8)
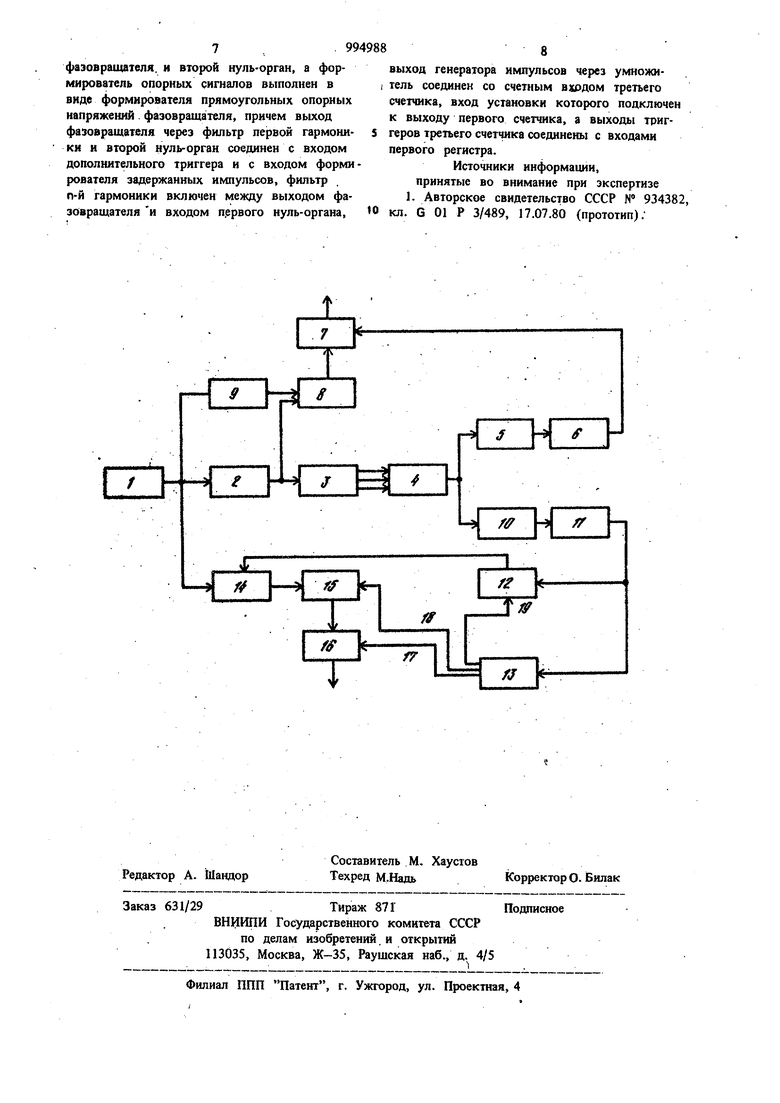
с учетом выражений (6), (7), (8) суммарная относительная погрешность определения кода скорости может быть записана в виде 0.. F«r,Приравняв нулю производную Э сЛ / д Т получаем оптимальное значение периода опорного сигнала „ , при котором погрешность определения скорости вращения минимальнаНа основании соотношений (4) и (10) можно записать ouj 61 4 , -- , (j оо/ ГВр Считаем, например, что частота вращения двигателя равна 100 Гц, а частота генератора импульсов - 10 Гц. Тогда 12,6, т.е. частота опорного сигнала фазовращателя, при которой минимизируется погрешность определения углового положения, в 12,6 раз выше частоты опорного сигнала, при которой минимизируется погрешность определения скорости вращения. Целью изобретения является повышение точности определения углового положения и скорости вращения вала. Поставленная цель достигается тем, что в состав датчика дополнительно введены умножитель в п раз частоты генератора импульсов, третий счетчик, фильтры п-й и первой гармоник выходного сигнала фазоврапштеля И второй нуль-орган, а формирователь опор ных сигналов выполнен в виде формирователя прямоугольных опорных напряжений ф зовращателя, причем выход фазовращателя через фильтр первой гармоники и второй нуль-орган соединен с входом дополнительного триггера и с входом формирователя задержанных импульсов, фильтр п-й гармоники включен между выходом фазовращателя и входом первого нуль-органа, выход генератора импульсов через умножитель частоты соединен со счетным входом третьего счетчика, вход ус1ановки которого подключен к выходу первого счетчика, а выхода триггера третьего счетчика соединены с вхо дами первого регистра. На чертеже изображена функциональная схема датчика. Датчик содержит генератор 1 импульсов, выход которого подключен к счетному входу первого счетчика 2. Выход старшего разряда счетчика 2 через формирователь 3 прямоугольных опорных сигналов соединен со входами фазовращателя 4, подключенного своим выходом ко входу фильтра п-й гармоники 5, соединенного своим выходом со входом первого нуль-органа 6. Выход последнего соединен со входом разрешения записи первого регистра 7, информационные входы которого подключены к выходам соответствующих триггеров третьего счетчика 8 вход сброса которого соединен с выходом первого счетчика 2. Счетный вход счетчика 8 через умножитель 9 частоты соединен с выходом генератора 1, Коэффициент пересчета счетчика 8 такой же, как у счетчика 2. Канал определения скорости вращения начинается здесь с последовательно соединенных фильтра 10 первой гармоники сигнала фазовращателя и второго нуль-органа 11. Выход последнего, в свою очередь, подключен к входам сброса дополнительного тригге ра 12 и формирователя 13 задержанных импульсов, третий выход которого соединен с входом установки в единичное состояние триггера 12. Выход последнего подключен к управляющему входу ключа 14. Выход ключа 14 соединен со счетным входом второго счетчика 15, входы предустановки которого соединены со вторым выходом формирователя 13 задержанных импульсов, первый выход которого подключен к входу разрешения записи второго регистра 16, информационные входы которого соединены с выходами триггеров счетчика 15. Устройство работает следующим образом. Первый счетчик 2 выполняет функ1щю деления частоты генератора 1 импульсов. Фо мирователь 3 вырабатывает из выходных пе86риодических сигналов первого счетчика 2 прямоугольные опорные напряжения фазовращателя 4. Как известно, прямоугольный пери одический сигнал раскладывается в ряд Фурье по нечетным гармоникам, следовательно, выходной сигнал фазовращателя содержит как первую, так и высшие нечетные гармоники. Первый фильтр 5 выделяет высшую п-ю гармонику выходного сигнала фазовращателя. Нуль-орган 6 формирует из выходных синусоидальных сигналов фильтра 5 прямоугольные импульсы, по переднему фронту которых производится запись во второй регистр 7 с выходов третьего счетчика 8 текущего углового положения. На счетный вход счетчика 8 поступают импульсы с выхода умножителя 9 частоты, имеющие частоту в п раз выше частоты генератора I импульсов. Таким образом, фиксация кода углового положения производится п раз за один период выходного напряжения фазовращателя. Канал определения угловой скорости вращения работает следующим образом. Второй фильтр 10 выделяет первую гармонику выходного сигнала фазовращателя 4, а второй нуль-орган П формирует из выходных сигналов фильтра 10 прямоугольные импульсы, по переднему фронту которых устанавливается в нулевое состояние триггер 12, вызывая. закрытие ключа 14 и прекращая поступление импульсов генератора 1 на счетный вход второго счетчика 15. Через время, достаточное для завершения переноса в счетчике 15, импульс 17 с первого выхода формирователя задержанных импульсов 13 разрешает перезапись кода скорости из счетчика 15 во второй регистр 16. Второй импульс 18 с выхода формирователя 13 задержанных импульсов, воздействуя на входы предустановки счетчика 15, осуществляет запись в счетчик 15 кода, соответствующего промежутку времени, в течение которого счетчик- 15 отключался от выхода генератора 1. Третий импульс 19 формирователя 13 задержанных импульсов устанавливает триггер 12 в единичное состояние, и цикл определения кода скорости повторяется. Формула изобретения Датчик углового положения и скорости вращения вала по авт. св. N 934382, о тличающийся тем, что, с целью повышения точности определения углового положения и скорости вращения, в датчик введены умножитель в п раз частоты генератора импульсов, третий счетчик, фильтры п-й и первой гармоник выходного сигнала 7.. 99 фазовращателя, и второй нуль-орган, а формирователь опорных сигналов выполнен в виде формирователя прямоугольных опорных напряжений фазовращателя, причем выход фазовращателя через фильтр первой гармоники и второй нуль-орган соединен с входом дополнительного триггера и с входом форми рователя задержанных импульсов, фильтр п-й гармоники включен между выходом фазовращателя и входом первого нуль-органа, выход генератора импульсов через умножитель соединен со счетным вхрдом третьего счетчика, вход установки которого подключен к выходу первого счетчнка, а выходы триггеров третьего счетчика соединены с входами первого регистра. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР М 934382 кл. G 01 Р 3/489, 17.07.80 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик углового положения, скорости и ускорения вращения вала | 1982 |
|
SU1107055A2 |
| Датчик углового положения и скорости вращения вала | 1980 |
|
SU934382A1 |
| Датчик углового положения,скорости и ускорения вращения вала | 1983 |
|
SU1101740A1 |
| Датчик углового положения и скорости вращения вала | 1982 |
|
SU1053006A2 |
| Датчик углового положения,скорости и ускорения вращения вала | 1981 |
|
SU994990A2 |
| Датчик углового положения и скорости вращения вала | 1988 |
|
SU1599778A2 |
| Датчик углового положения и скорости вращения вала | 1988 |
|
SU1615619A2 |
| Датчик углового положения и скорости вращения вала | 1989 |
|
SU1695233A2 |
| Цифровой тахометр | 1989 |
|
SU1615615A1 |
| Датчик углового положения,скорости и ускорения вращения вала | 1983 |
|
SU1213417A2 |
CZJ- 1
